四轴飞控DIY Mark4 - 整理&参数优化
Posted lida2003
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了四轴飞控DIY Mark4 - 整理&参数优化相关的知识,希望对你有一定的参考价值。
四轴飞控DIY Mark4 - 整理&参数优化
通过四轴飞控航模的一些了解,将大致的经历过程和体会整理下,并进一步对当前Mark4的参数优化一并给出。
1. 历程
- 首先,从性价比、功能扩展角度,DIY机架入手(新手入门肯定各种坑)
- 然后,测试起飞各种炸机也是不难避免的(新手需要心理准备,如果是前面的高性价比那就不用担心了)
稳步测试办法,避免炸机:四轴飞控DIY调试起飞简明步骤
- 50米近距离可以不要FPV,要超过100米以上建议FPV
- 上FPV之前一定要适应起飞和降落,可以通过模拟器来进行尝试(如果手动飞更要先上模拟器,否则炸机是分分钟的事情)
- 不同的动力配置、机架、安装方式等都会有不同的问题。FPV最主要的还是果冻的问题。
- 通过排除法进行各种测试,定位了机架+动力套件导致低频振动导致果冻,穿越机机架选择
- F450机架相当于10年前的水平,Mark4是当前的水平,对比分析减震效果
- 减震排除后,果冻效应消失,新增远航GPS救援功能
- 期间遇到RadioLink控制距离和ExpressLRS控制链路问题
RadioLink控制距离问题:四轴飞控DIY集成FPV功能
ExpressLRS控制链路问题:TX12 + ExpressLRS 915MHz RC控制链路配置及问题汇总
2. 参数优化
鉴于整个历程各种问题和体会,都有相关介绍的日志供大家参考,这里不再展开。
针对有一些抖动(wobble)的问题,这里做一个总结:
2.1 固件BF4.3.1

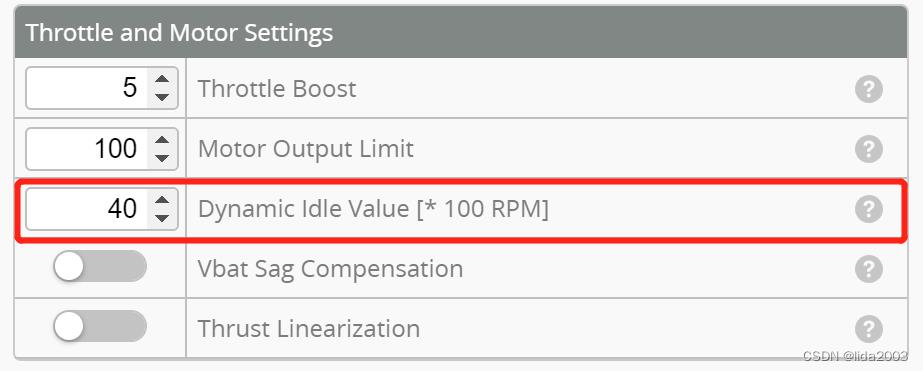
2.2 动态怠速值
【PID Tunning】->【PID Profile Settings】->【Throttle and Motor Settings】->【Dynamic Idle Value】
建议:30-40
2.3 滤波参数
【PID Tunning】->【Filter Settings】->【Gyro Filter】
【PID Tunning】->【Filter Settings】->【D Term Filter】
建议:滑块往右可以改善prop wash,但是要注意引入低频振动。

2.4 电调PWM频率
降低PWM频率可以减少prop wash,尤其是大型机,比如:7寸及以上
这里和电调厂商确认过48KHz没有问题(24KHz测试过也没有什么改善)

2.5 GPS高度配置
因为GPS高度精度还不如气压计来的高,总体感觉没有个15、16颗卫星,还不如用气压计。
# get position
position_alt_source = DEFAULT
Allowed values: DEFAULT, BARO_ONLY, GPS_ONLYposition_alt_gps_min_sats = 16
Allowed range: 4 - 50
Default value: 10position_alt_baro_fallback_sats = 15
Allowed range: 3 - 49
Default value: 7
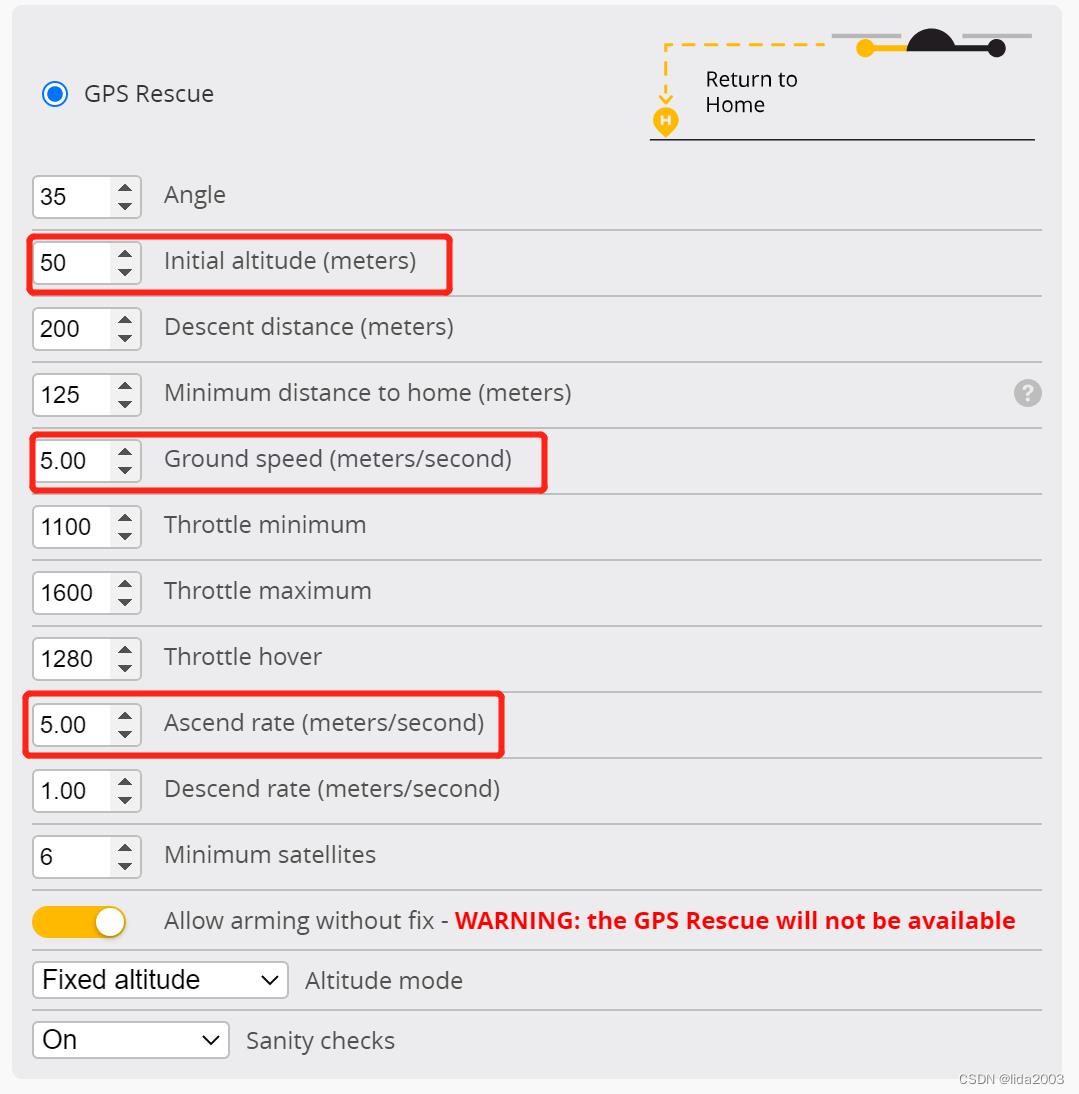
2.6 返航速度和高度
换算:
1米/秒 = 60米/分钟 = 3.6公里/小时
5米/秒 = 300米/分钟 = 18公里/小时
通常来说:
- 失控以后,飞机只要飞到一定高度 和/或 返回一段距离,就能重新获得控制。因此,上升和返航速度5米/秒也很合适。
- 返航高度主要看飞行周边的最高高度(这里航模限制最高高度100米)
基本上就是山顶,所以比周边位置都高。50米高度返航设置妥妥的。
==》BetaFlight Mark4 + 十里琅珰 + ELRS3.0 + 500mW_Dyn
周边建筑都有基本上70米。100米高度返航设置是需要的。
==》BetaFlight Mark4 + 善贤地铁站口 + 城北公园
注:通常情况下城市里面不要飞的太远了,所以不要去很高的高楼之间穿越。除非得到官方或者本地管理机构许可。航模还是稳稳的飞,这样大家才都有的玩。
2.7 线性推力修正
这个有一飞冲天的问题,建议不要超过30(只有在万不得已的情况下才去尝试)。
# get thrust_linear
thrust_linear = 0
tprofile 0
tAllowed range: 0 - 150
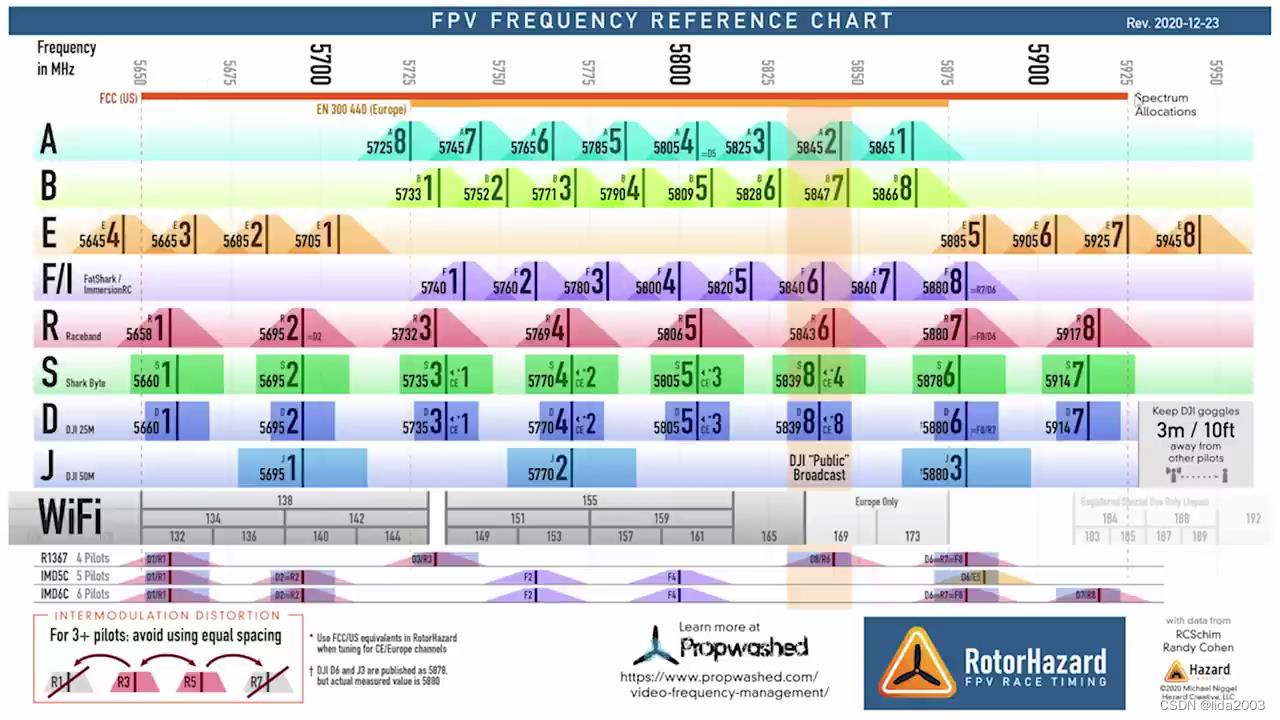
2.8 图传频道调整
图传受到周边频率干扰影响,比如:其他FPV飞机,5.8GWiFi或者其他信号等等,建议尽量避开别人的频点。
原来一直用E1的频段,看了这张图,可以考虑使用E6(5905MHz),R8(5917MHz)
注:图传不一样,请大家根据各自的图传以及周边情况,适时调整。

3. 补充
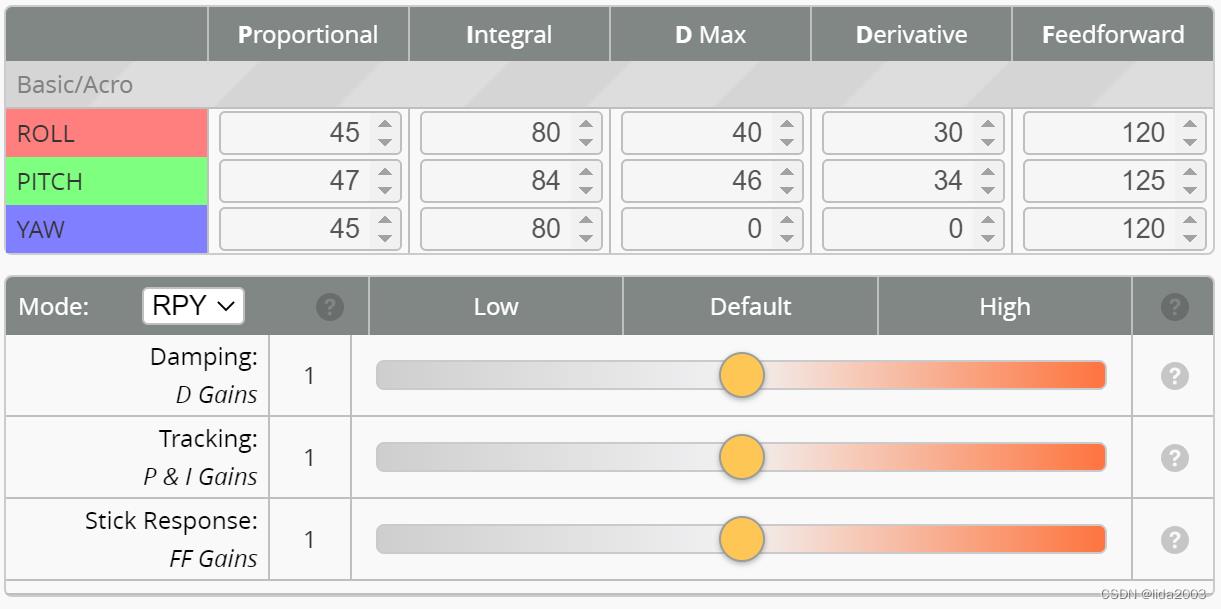
3.1 PID参数
注:5寸机采用默认一般没有什么大问题。
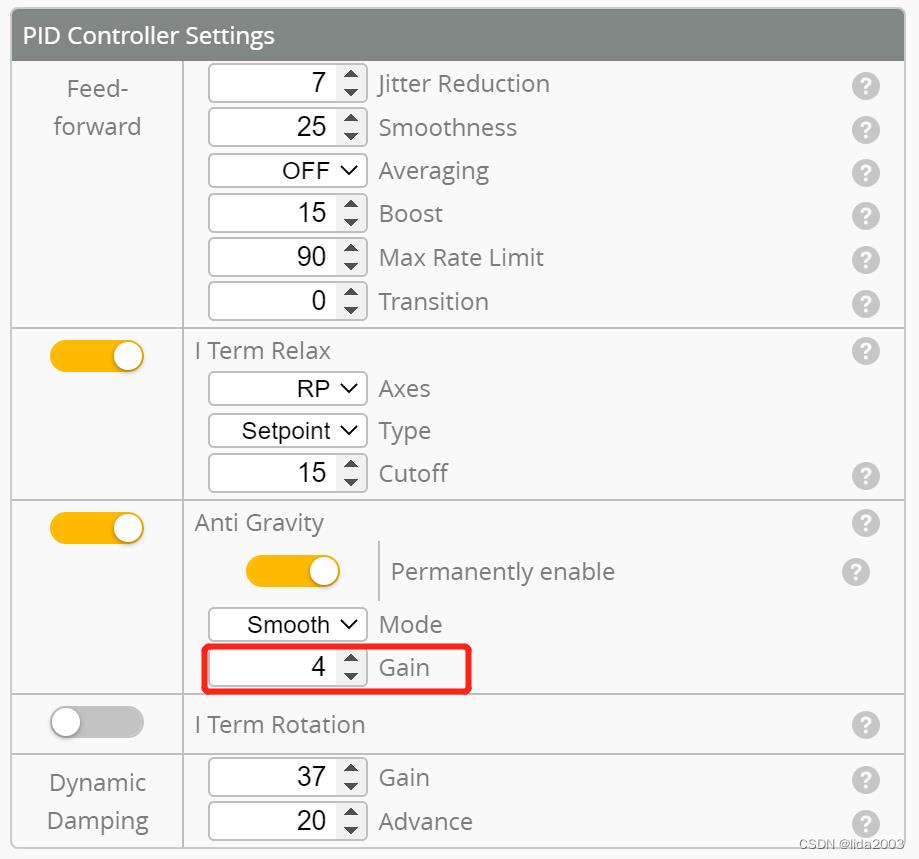
3.2 反重力
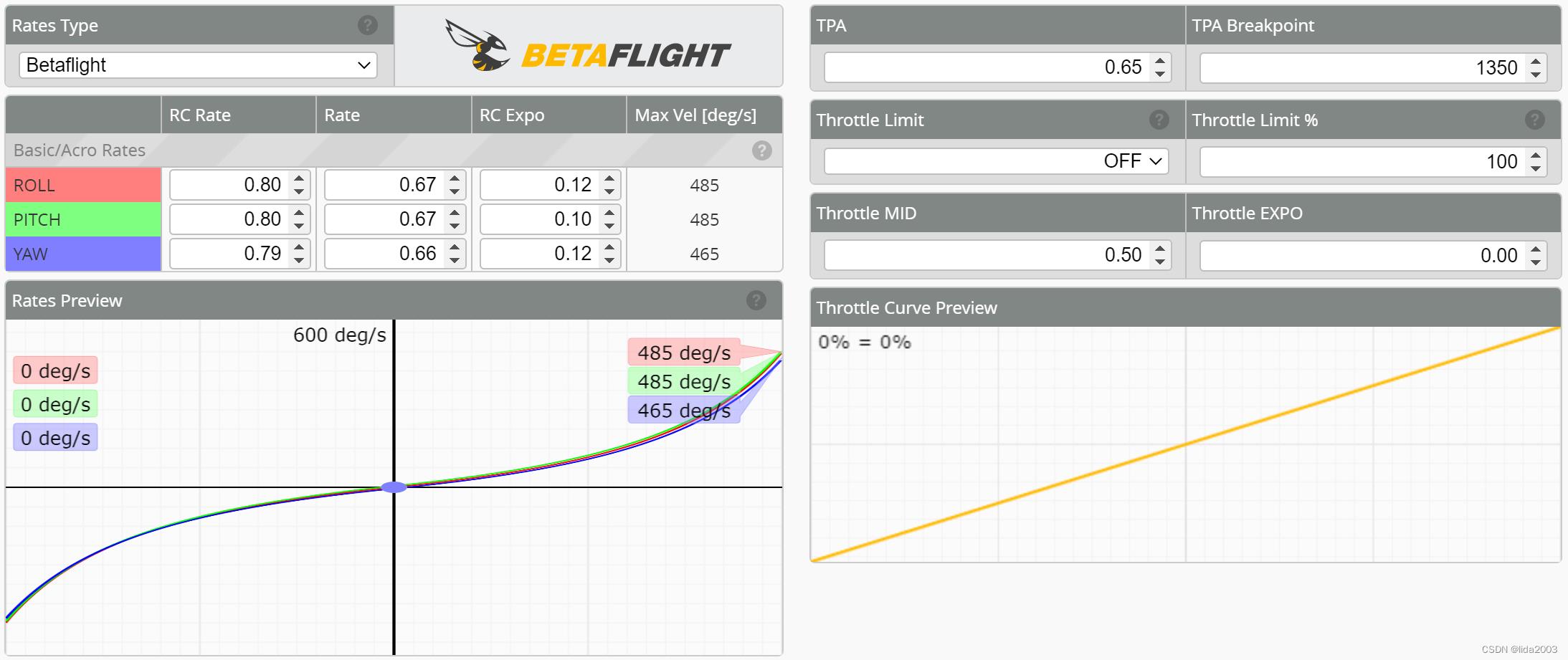
3.3 Rate设置
以上是关于四轴飞控DIY Mark4 - 整理&参数优化的主要内容,如果未能解决你的问题,请参考以下文章