虚拟机Ubuntu16.04的ROS开发环境建立
Posted 只要可乐
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了虚拟机Ubuntu16.04的ROS开发环境建立相关的知识,希望对你有一定的参考价值。
虚拟机Ubuntu16.04的ROS开发环境建立
步骤一,安装ROS机器人操作系统。
步骤二,创建工作空间。
步骤三,拷贝功能包和配置文件到工作空间。
步骤四,回到ros_ws/目录下,再次运行编译指令
有独立Linux开发主机Ubuntu的用户,也可以自行搭建开发环境,建议有一定技术基础用户操作,可参考如下步骤搭建开发环境,步骤仅供参考,使用虚拟机的用户跳过。
步骤一,安装ROS机器人操作系统。
首先进入ROS的官方网站http://wiki.ros.org/ROS。会跳出下方页面。
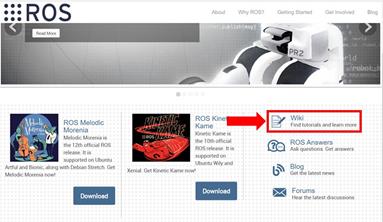
点击图中标记的Wiki图标将会弹出下方页面。
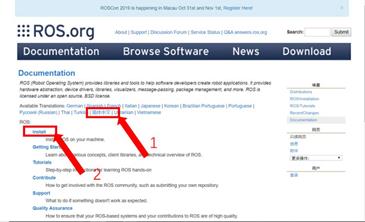
首先选择“简体中文”,将页面改为中文模式,然后选择“Install”安装ROS,将会弹出下方页面。

如您的主机为Ubuntu16.04版本,请选择ROS Kinetic Kame。
若您的主机为Ubuntu18.04版本,请选择ROS Melodic Morenia。
以ROS Kinetic Kame版本为例,点击后弹出下方页面。

选择Ubuntu,弹出下方页面。
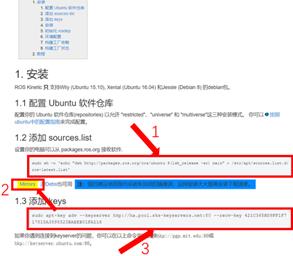
首先在弹出页面中找到上图的几个命令,打开你的ubuntu16.04,在终端下对标号为1的命令复制进命令行并执行,添加sources.list(源列表);第二步点击标号2的图标,将页面China下的两条命令的任意一条复制执行,改为中国的镜像源,第一个是中科大,第二个是清华,均可使用。


然后复制标号为3的命令并执行,这是添加keys的命令,等待执行完成。

首先执行页面上的sudo apt-get update命令,更新软件包索引,等待完成后执行sudo aptget install ros-kinetic-desktop-full,安装桌面完整版的ROS系统这个过程会比较漫长,其中不仅有ROS还包含了rqt、rviz等辅助工具,还有一些库。完成上述操作后ROS已安装完成,下面要进行初始化操作,继续下拉,找到下方页面。
 首先在终端执行命令一:sudo rosdep init,然后执行命令二:rosdep update,这样 rosdep 就初始化完成了。
首先在终端执行命令一:sudo rosdep init,然后执行命令二:rosdep update,这样 rosdep 就初始化完成了。
执行命令三:echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc,
之后执行命令四:source ~/.bashrc,完成这些操作ROS就已经完全安装完成并可以使用了,这时我们运行在终端执行roscore,当出现下方提示行时,代表我们的ROS已经成功安装并可以工作了,ROS安装到此结束。
步骤二,创建工作空间。
首先在用户根目录下创建工作空间,建立工作文件夹ros_ws,在ros_ws文件夹中建立src文件夹。

运行编译命令,运行完后,ros_ws文件加下生成build和devel两个系统文件夹。
步骤三,拷贝功能包和配置文件到工作空间。
从资料包中找到如下两个文件,拷贝到src文件夹下。运行catkin_make
步骤四,回到ros_ws/目录下,再次运行编译指令catkin_make
至此,安装完成。
以上是关于虚拟机Ubuntu16.04的ROS开发环境建立的主要内容,如果未能解决你的问题,请参考以下文章