matlab simulink基于自抗扰控制的机械臂位置仿真
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab simulink基于自抗扰控制的机械臂位置仿真相关的知识,希望对你有一定的参考价值。
1、内容简介
略
608-可以交流、咨询、答疑
2、内容说明
机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿
不确定性主要分为两种主要类型:结构(structured)不确定性和非结构(unstructured)不确定性,非结构不确定性主要是由于测量噪声、外界干扰及计算中的采样时滞和舍入误差等非被控对象自身因素所引起的不确定性。结构不确定性和建模模型本身有关,可分为
①参数不确定性 如负载质量、连杆质量、长度及连杆质心等参数未知或部分已知。
②未建模动态 高频未建模动态,如执行器动态或结构振动等;低频未建模动态,如动/静摩擦力等。
模型不确定性给机械臂轨迹跟踪的实现带来影响,同时部分控制算法受限于一定的不确定性。应用于机械臂控制系统的设计方法主要包括PID控制、自适应控制和鲁棒控制等,然而由于它们自身所存在的缺陷,促使其与神经网络、模糊控制等算法相结合,一些新的控制方法也在涌现,很多算法是彼此结合在一起的。
跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。虽然叫做扩展状态观测器,但与普通的状态观测器不同。扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。然后给出控制量补偿这些扰动。将控制对象变为普通的积分串联型控制对象。设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。非线性误差反馈控制律给出被控对象的控制策略。
自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。
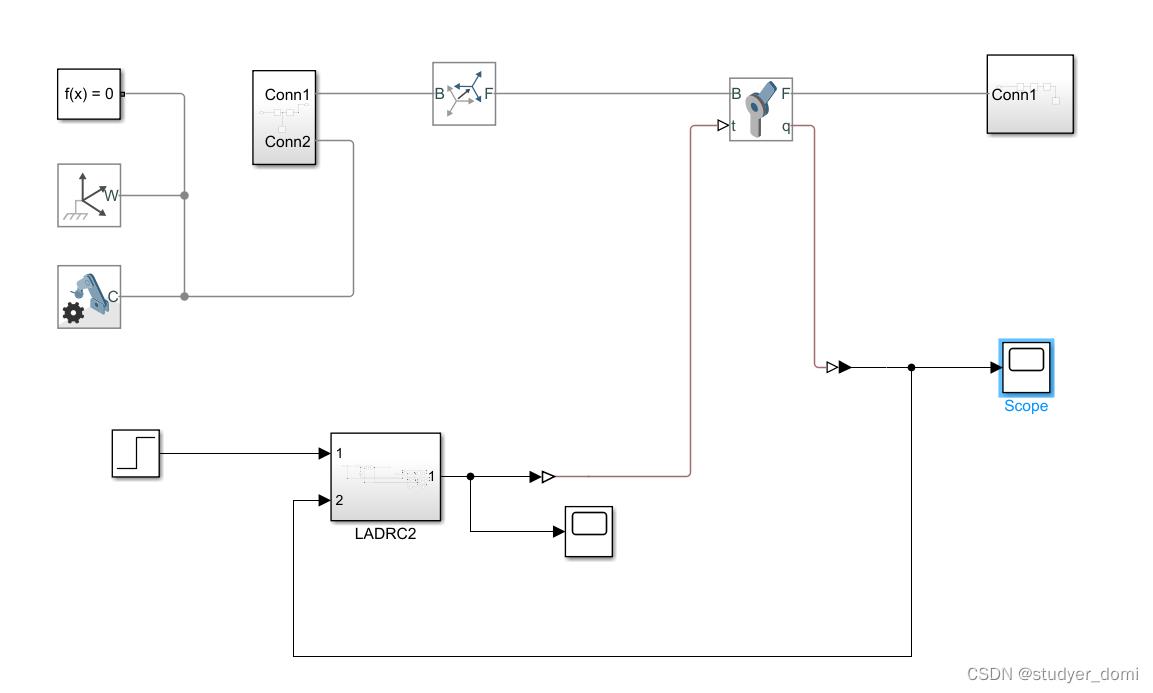
3、仿真分析
4、参考论文
略
以上是关于matlab simulink基于自抗扰控制的机械臂位置仿真的主要内容,如果未能解决你的问题,请参考以下文章