OpenCV图像缩放插值之BiCubic双三次插值
Posted 贺二公子
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV图像缩放插值之BiCubic双三次插值相关的知识,希望对你有一定的参考价值。
原文地址:https://blog.csdn.net/duiwangxiaomi/article/details/123845869
文章目录
图像缩放算法简介
在图像的仿射变换中,很多地方需要用到插值运算,常见的插值运算包括最邻近插值,双线性插值,双三次插值(立体插值),兰索思插值等方法,OpenCV提供了很多方法,其中,双线性插值由于折中的插值效果和运算速度,运用比较广泛。双三次插值效果最好,但速度较慢。
OpenCV中实现图像缩放的函数为
void resize(InputArray src, OutputArray dst, Size dsize, double fx=0, double fy=0, int interpolation=INTER_LINEAR );
参数说明:
- src:输入,原图像,即待改变大小的图像;
- dst:输出,改变大小之后的图像,这个图像和原图像具有相同的内容,只是大小和原图像不一样而已;
- dsize:输出图像的大小。如果这个参数不为0,那么就代表将原图像缩放到这个Size(width,height)指定的大小;如果这个参数为0,那么原图像缩放之后的大小就要通过下面的公式来计算:
其中,fx和fy就是下面要说的两个参数,是图像width方向和height方向的缩放比例。dsize = Size(round(fxsrc.cols), round(fysrc.rows))
fx:width方向的缩放比例,如果它是0,那么它就会按(double)dsize.width/src.cols来计算;
fy:height方向的缩放比例,如果它是0,那么它就会按照(double)dsize.height/src.rows来计算; - interpolation:这个是指定插值的方式,图像缩放之后,肯定像素要进行重新计算的,就靠这个参数来指定重新计算像素的方式,有以下几种:
- INTER_NEAREST - 最邻近插值
- INTER_LINEAR - 双线性插值,如果最后一个参数你不指定,默认使用这种方法
- INTER_AREA - 区域插值
resampling using pixel area relation.
It may be a preferred method for image decimation, as it gives moire’-free results.
But when the image is zoomed, it is similar to the INTER_NEAREST method. - INTER_CUBIC - 双三次插值,4x4像素邻域内的双立方插值
- INTER_LANCZOS4 - 8x8像素邻域内的Lanczos插值
OpenCV中INTER_CUBIC算法原理
接下来讲一下INTER_CUBIC - 双三次插值的算法原理。
双三次插值算法是基于周围的4*4=16个像素点,通过计算16个像素点的权重,累积得到增加点的像素值。
算法流程
- 假设源图像A大小为m * n,缩放K倍后的目标图像B的大小为M*N,即K=M/m;
- A的每一个像素点是已知的,B是未知的,我们想要求出目标图像B中每一像素点(X,Y)的值,必须先找出像素(X,Y)在源图像A中对应的像素(x,y);
- 再根据源图像A距离像素(x,y)最近的16个像素点作为计算目标图像B(X,Y)处像素值的参数;
利用BiCubic基函数求出16个像素点的权重,图B像素(x,y)的值就等于16个像素点的加权叠加。
算法原理
根据比例关系x/X=m/M=1/K,我们可以得到B(X,Y)在A上的对应坐标为
A
(
x
,
y
)
=
A
(
X
∗
(
m
/
M
)
,
Y
∗
(
n
/
N
)
)
=
A
(
X
/
K
,
Y
/
K
)
A(x,y)=A(X*(m/M),Y*(n/N))=A(X/K,Y/K)
A(x,y)=A(X∗(m/M),Y∗(n/N))=A(X/K,Y/K)
如图所示P点就是目标图像B在(X,Y)处对应于源图像A中的位置,P的坐标位置会出现小数部分,所以我们假设 P的坐标为P(x+u,y+v),其中x,y分别表示整数部分,u,v分别表示小数部分(蓝点P1到a11方格中红点的距离)。那么我们就可以得到如图所示的最近16个像素的位置,在这里用a(i,j)(i,j=0,1,2,3)来表示,如下图,图中方格为单个像素的尺寸,红点为像素中心。
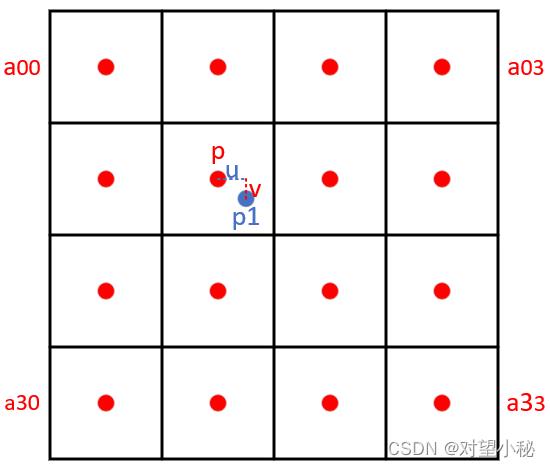
双立方插值的目的就是通过找到一种关系,或者说系数,可以把这 16 个像素对于 P 处像素值的影响因子找出来,从而根据这个影响因子来获得目标图像对应点的像素值,达到图像缩放的目的。
BiCubic基函数形式如下

BiCubic函数图像如下
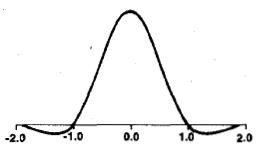
我们要做的就是求出BiCubic函数中的参数x,从而获得上面所说的16个像素所对应的权重W(x)。
BiCubic基函数是一维的,而像素是二维的,所以我们将像素点的行与列分开计算。
BiCubic函数中的参数x表示该像素点到P点的距离。
例如a00距离P(x+u,y+v)的距离为(1+u,1+v),因此a00的纵坐标权重i_0=W(1+v),横坐标权重j_0=W(1+u),a00对B(X,Y)的贡献值为:
(
a
00
像素值)
∗
i
0
∗
j
0
(a00像素值)* i_0* j_0
(a00像素值)∗i0∗j0
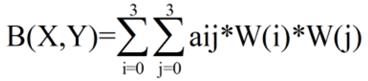
因此,a0X的横坐标权重分别为W(1+u),W(u),W(1-u),W(2-u);ay0的纵坐标权重分别为W(1+v),W(v),W(1-v),W(2-v);B(X,Y)像素值为:
CUBIC算法C语言实现
// im-原图指针 w-原图宽 h-原图高
// s_im-目标图像指针 w-目标图像宽 h-目标图像高
const int ErrorCode_imdataProc =-1000000;
int vcImageSimpleSamplingRoi(unsigned char * im, int w, int h,
unsigned char * s_im, int s_w, int s_h)
int ret = 0;
float fWStep = 0.0f, fHStep = 0.0f;
int ii = 0, jj = 0;
unsigned char * pCurr = 0;
unsigned char * pSamp = 0;
const float A = -0.75f;
float coeffsX[4], coeffsY[4];
float fx = 0.0f, fy = 0.0f;
int sx = 0, sy = 0, iscale_x = 0, iscale_y = 0;
short cbufX[4], cbufY[4];
int sum = 0;
int mm = 0, nn = 0;
if (NULL == im || w <= 0 || h <= 0 ||
NULL == s_im || s_w <= 0 || s_h <= 0)
ret = ErrorCode_imdataProc - 4;
goto nExit;
fWStep = 1.0f * roi.width / s_w;
fHStep = 1.0f * roi.height / s_h;
pSamp = s_im;
for (ii = 0; ii < s_h; ++ii)
fy = (float)((ii + 0.5)*fHStep - 0.5);
sy = vcFloor(fy);
fy -= sy;
if (sy < 1)
fy = 0, sy = 1;
if (sy >= roi.height- 3)
fy = 0, sy = roi.height - 3;
coeffsY[0] = ((A*(fy + 1) - 5*A)*(fy + 1) + 8 * A)*(fy + 1) - 4 * A;
coeffsY[1] = ((A + 2)*fy - (A + 3))*fy*fy + 1;
coeffsY[2] = ((A + 2)*(1 - fy) - (A + 3))*(1 - fy)*(1 - fy) + 1;
coeffsY[3] = 1.f - coeffsY[0] - coeffsY[1] - coeffsY[2];
cbufY[0] = (short)(coeffsY[0] * 2048);
cbufY[1] = (short)(coeffsY[1] * 2048);
cbufY[2] = (short)(coeffsY[2] * 2048);
cbufY[3] = (short)(coeffsY[3] * 2048);
for (jj = 0; jj < s_w; ++jj)
fx = (float)((jj + 0.5)*fWStep - 0.5);
sx = vcFloor(fx);
fx -= sx;
if (sx < 1)
fx = 0, sx = 1;
if (sx >= roi.width- 3)
fx = 0, sx = roi.width- 3;
coeffsX[0] = ((A*(fx + 1) - 5*A)*(fx + 1) + 8*A)*(fx + 1) - 4*A;
coeffsX[1] = ((A + 2)*fx - (A + 3))*fx*fx + 1;
coeffsX[2] = ((A + 2)*(1 - fx) - (A + 3))*(1 - fx)*(1 - fx) + 1;
coeffsX[3] = 1.f - coeffsX[0] - coeffsX[1] - coeffsX[2];
cbufX[0] = (short)(coeffsX[0] * 2048);
cbufX[1] = (short)(coeffsX[1] * 2048);
cbufX[2] = (short)(coeffsX[2] * 2048);
cbufX[3] = (short)(coeffsX[3] * 2048);
sum = 0;
for (mm = 0; mm < 4; ++mm)//rows
pCurr = im + (roi.y + sy + mm - 1) * w + roi.x;
for (nn = 0; nn < 4; ++nn)//cols
sum += pCurr[sx + nn - 1] * cbufY[mm]*cbufX[nn];
pSamp[jj] = sum >> 22;
pSamp += s_w;
ret = 1;
nExit:
return ret;
结语
以上为OpenCV图像缩放插值之BiCubic双三次插值的原理及实现。如还有不懂,可参考下面的参考链接,都是很不错的文章。
参考链接:
- OpenCV中resize函数五种插值算法的实现过程
- OpenCV ——双线性插值(Bilinear interpolation)
- C++ OpenCV实现图像双三次插值算法详解
- 双三次插值(BiCubic插值)
- 图像插值算法之双三次插值
- BiCubic Interpolation
- OpenCV图像缩放resize各种插值方式的比较
- aitken插值方法的c++代码_双三次插值算法的C++实现与SSE指令优化
以上是关于OpenCV图像缩放插值之BiCubic双三次插值的主要内容,如果未能解决你的问题,请参考以下文章