matlab simulink球杆控制系统的模糊PID控制设计
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab simulink球杆控制系统的模糊PID控制设计相关的知识,希望对你有一定的参考价值。
1、内容简介
略
491-可以交流、咨询、答疑
2、内容说明
球杆系统是控制理论中比较突出的实验设备之一。球杆系统受到如此广泛的应用,是因为它有一些重要的性质,例如其非线性特性、开环不稳定特性等,许多经典的或者现代的设计方法都可以应用到球杆系统中,它成为检测控制理论的理想的实验装置。
针对球杆系统的平衡控制,基于MATLAB设计了模糊PID控制器。首先分析了球杆控制系统实验平台的组成及工作原理,通过球杆控制系统实验平台的组成及工作原理和球杆控制系统的平衡控制策略,利用数学建模的方法建立了球杆控制系统实验平台的数学模型,通过分析和探讨常规PID对球杆控制系统平衡控制的优点和缺点的基础上进行了模糊PID控制方法的工作原理及算法分析,分析了PID参数自整定方法,设计了模糊自组织PID,实现了基于MATLAB设计的球杆控制的模糊PID控制器,总结了模糊PID控制器相比于常规PID控制器对于球杆控制的优点,实验仿真结果表明,设计的模糊PID控制器能对球杆控制系统平衡控制得到较为理想的效果。
关键词:球杆控制系统;平衡控制;数学建模;模糊PID控制器; MATLAB仿真

球杆控制系统的结构模型如图6所示,推导出模型将考虑角度与电机角度之间的关系和球的位置。为了简化,球之间的摩擦力被忽略了。因此,根据牛顿三大定律的第二个法则,影响球运动的总受力是由于其平移和旋转而作用在球上的力只有动能。
2.2 系统数学模型
由图6可推导系统的数学模型,由于忽略小球的与杆支架之间的摩擦力,所以系统的平衡控制公式由公式(16)可见:
(16)
其中公式(16)里面的m代表小球质量;J代表小球的转动惯量;R代表小球半径;r代表小球位置偏移;g是重力加速度;α是横杆偏角;又根据各种角的关系由公式(17)可见:
(17)
当系统综合考虑下忽略比较小的摩擦力和,得到公式由公式(18)可见:
(18)
进一步的,由公式(19)可见:
(19)
根据各系统之间的关系,可导出如下公式(20):
(20)
因此,公式(20)即球杆控制系统的数学模型,可作为PID控制或者模糊PID控制的使用。
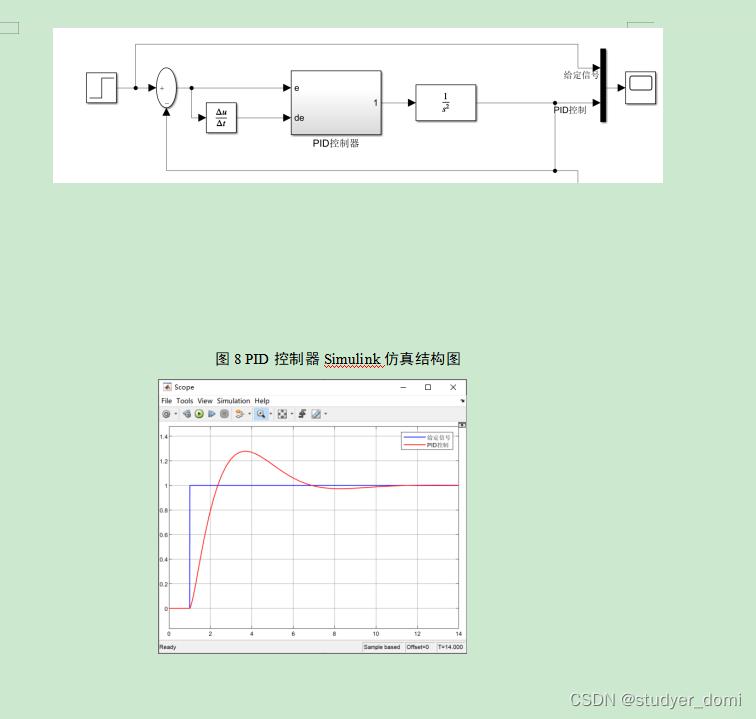
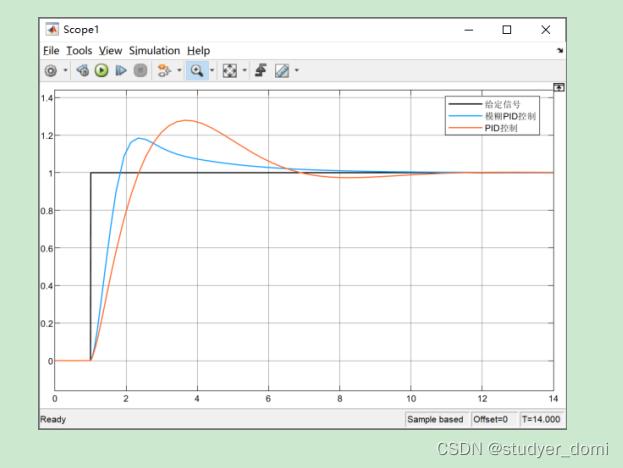
3、仿真分析
4、参考论文
略
以上是关于matlab simulink球杆控制系统的模糊PID控制设计的主要内容,如果未能解决你的问题,请参考以下文章