基于自抗扰控制adrc的高速列车运行控制算法研究
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于自抗扰控制adrc的高速列车运行控制算法研究相关的知识,希望对你有一定的参考价值。
1、内容简介
略
429-可以交流、咨询、答疑
2、内容说明
精确停车是城轨列车自动驾驶系统的关键技术之一,其精度通常要求在30厘米之内。精确停车能保证城轨交通系统的高效率运行。若列车停站不准确,不仅影响乘客的上下车,而且会造成列车晚点等诸多问题。因此,研究城轨列车精确停车算法具有重要意义。
本文以城轨列车为控制对象,基于列车自动驾驶系统的关键技术,深入分析列车的自动停车过程。利用Pade近似方法处理具有延时滞后的制动系统模型;结合列车牵引计算模型和制动系统模型,提出城轨列车停车控制算法的设计目标,即在避免控制输入切换频繁的前提下实现高精度的速度跟踪效果。
基于列车制动系统模型,应用终端滑模控制原理设计列车停车控制算法。为增强列车停车控制系统的自适应性,引入参数自适应机制,设计了自适应终端滑模控制停车算法。将滑模控制中的符号函数替换为饱和函数,以防止控制系统产生抖振效应,由此确保列车运行过程中乘客的舒适性。在自适应终端滑模控制停车算法的基础上,进一步分析不同线路扰动对控制效果的影响。基于自适应终端滑模控制框架,引入扰动观测器,并将观测器的扰动观测值作为自适应终端滑模控制中扰动估计值,增强了系统的鲁棒性。
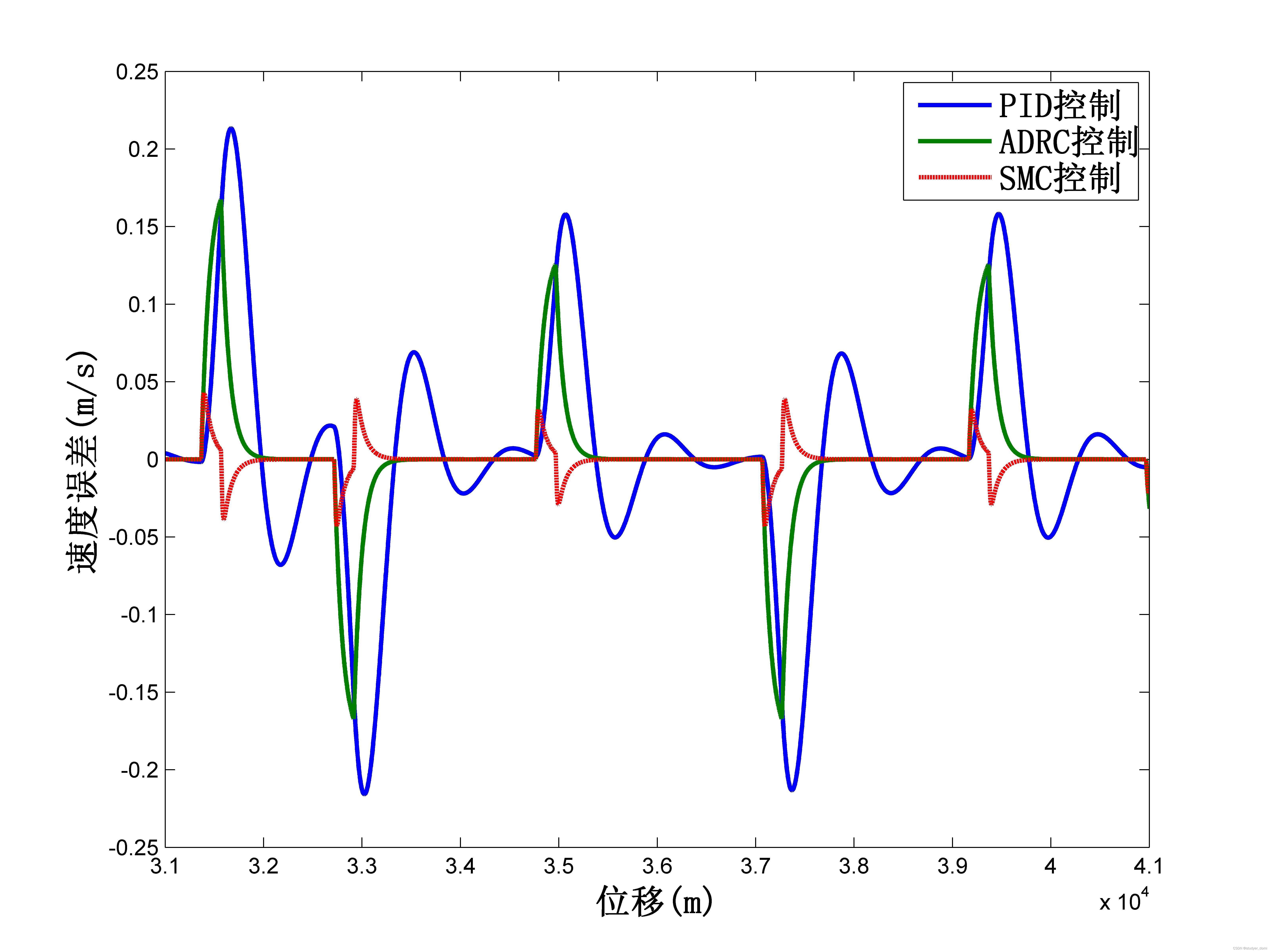
本文利用Matlab搭建仿真平台,以验证控制算法的正确性和有效性。仿真结果表明基于扰动观测器的自适应终端滑模控制停车算法表现出良好的鲁棒性和自适应性。在系统模型具备参数不确定性和外部扰动的情况下,控制系统都能保证高精度的停车和乘客的舒适性。
3、仿真分析
略
4、参考论文
01 - 从PID技术到_自抗扰控制_技术_韩京清.caj
02 - 基于自抗扰控制的磁浮列车自动驾驶算法研究.pdf
03 - 自抗扰控制器的优化设计与应用_赵海香.caj
04 - 基于滑模自抗扰的无人水面艇路径跟踪控制研究_李鹏.caj
05 - 基于终端滑模自抗扰的船舶航迹跟踪控制_秦朝宇.caj
06 - 基于滑模自抗扰控制器的永磁同步电机位置环控制研究_唐红雨.caj
07 - 液压位置伺服系统滑模自抗扰控制器设计_韩永成.caj
2016_先进PID控制MATLAB仿真 (4th)_带书签 wang.pdf
Active disturbance rejection control a paradigm shift in feedback control system.pdf
Scaling and BandwidthParameterization Based Controller Tuning.pdf
具有自适应增益的电液位置伺服系统超螺旋滑模控制_陈丽君 wang.pdf
线性自抗扰控制器的稳定性研究_陈增强.caj
以上是关于基于自抗扰控制adrc的高速列车运行控制算法研究的主要内容,如果未能解决你的问题,请参考以下文章