STM32F103+RTT从零开始——RTT系统中点亮LED
Posted 湖广午王
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F103+RTT从零开始——RTT系统中点亮LED相关的知识,希望对你有一定的参考价值。
上一篇博客简单说了下如何使用Keil创建STM32F103的工程,并且完成了LED点亮,及让LED等闪烁的功能,那是诸多同学学习单片机的起手式。本篇博客继续上一篇博客的内容,依旧是点亮LED,不同的是,这次点亮LED等,是在RT-Thread操作系统中进行的。
创建工程
创建一个Keil工程,芯片依旧选择STM32F103C8T6,然后在Manage Run-Time Environment对话框中选择需要用的的软件组件,与上文不同的是,我们需要把RTT一起勾上,这里的RTOS入口,可以通过RTT的官网搜索pack进行安装。如下图:
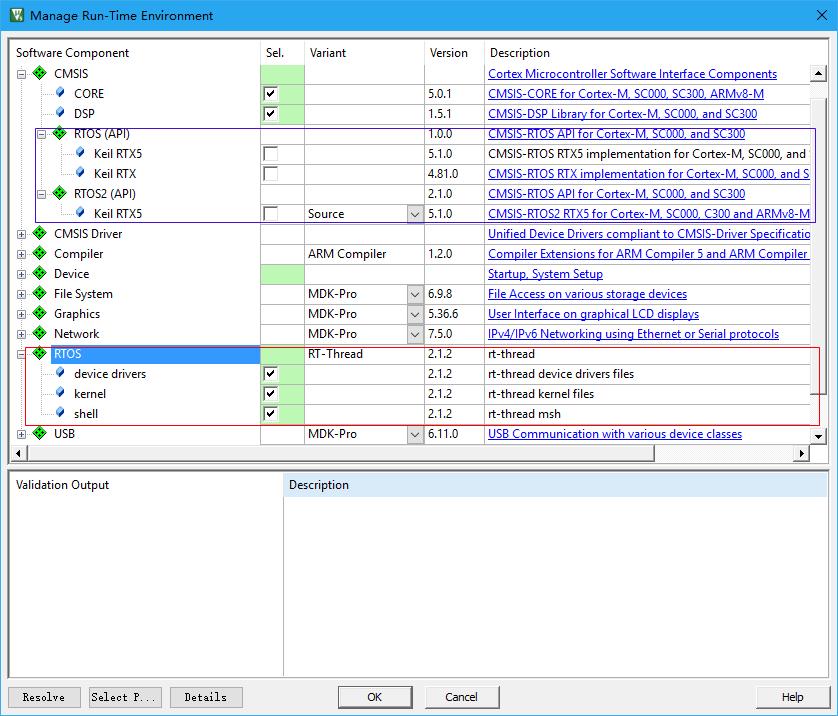
上图中,红线框中即为RTT操作系统的组件,分别为设备驱动,系统内核以及shell。蓝线框中为Keil的RTX操作系统。我们现在要用的是RTT,所以勾选RTT的组件即可,其中Kernel为必选项,device drivers依赖kernel,shell又依赖device drivers。
shell也提一下,shell强翻成中文就是命令行外壳,如同linux操作系统一样,RTT也提供了一套共用户在命令行操作的操作接口。RTT提供的这套接口叫做finsh,主要用于调试、查看系统信息。finsh支持两种模式:1. C语言解释器模式, 为行文方便称之为c-style;2. 传统命令行模式,此模式又称为msh(module shell)。
在大部分嵌入式系统中,一般开发调试都使用硬件调试器和printf日志打印,在有些情况下,这两种方式并不是那么好用。比如对于RT-Thread这个多线程系统,我们想知道某个时刻系统中的线程运行状态、手动控制系统状态。如果有一个shell,就可以输入命令,直接相应的函数执行获得需要的信息,或者控制程序的行为。这无疑会非常方便。finsh就是基于此而设计,它运行于开发板,可以使用串口/以太网/USB等与PC机进行通信。
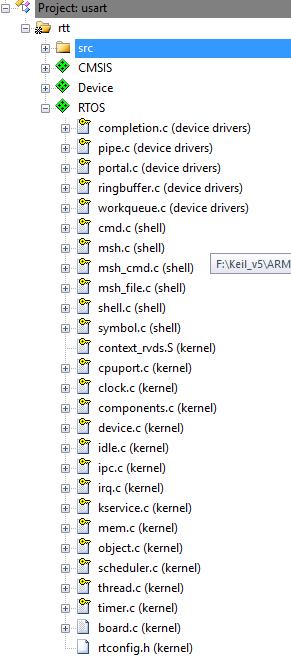
创建工程后,相对上一篇博客创建的工程,项目中会多出了RTT,如下图。至于各个文件及其作用,后续使用的时候再逐步理解。我们当前最需要关注的是board.c和rtthread.h两个文件。从图中可以看出,只有这两个文件上没有标注钥匙,有钥匙标注的是不允许更改,也就是我们能更改就是这两个文件。后面再分析这两个文件。且走下一步。
编写点灯程序
创建好工程后,开始编写点灯程序了,与上篇博客一样,直接贴上代码:
#include "rtthread.h"
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
int main()
GPIO_InitTypeDef gpioInit;
//打开GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//LED上拉连接GPIOB 12引脚,所以设置如下,推挽输出,Pin12,2MHz输出速度
gpioInit.GPIO_Mode=GPIO_Mode_Out_PP;
gpioInit.GPIO_Pin=GPIO_Pin_12;
gpioInit.GPIO_Speed=GPIO_Speed_2MHz;
GPIO_Init(GPIOB,&gpioInit);
while(1)
//点亮LED
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
//延时0.5s
rt_thread_delay(RT_TICK_PER_SECOND/2);
//关闭LED
GPIO_SetBits(GPIOB,GPIO_Pin_12);
//延时0.5s
rt_thread_delay(RT_TICK_PER_SECOND/2);
这样编写程序后,编译通过,烧写后却发现LED根本无法按照预期进行工作,这是因为我们还缺少工作没有做。
打开board.c,可以看到它上面有几句注释,根据注释,修改如下:
#include <rthw.h>
#include <rtthread.h>
#include "stm32f10x_rcc.h"
// rtthread tick configuration
// 1. include header files
// 2. configure rtos tick and interrupt
// 3. add tick interrupt handler
// rtthread tick configuration
// 1. include some header file as need
//#include <your_header_file.h>
#ifdef __CC_ARM
extern int Image$$RW_IRAM1$$ZI$$Limit;
#define HEAP_BEGIN (&Image$$RW_IRAM1$$ZI$$Limit)
#elif __ICCARM__
#pragma section="HEAP"
#define HEAP_BEGIN (__segment_end("HEAP"))
#else
extern int __bss_end;
#define HEAP_BEGIN (&__bss_end)
#endif
#define SRAM_SIZE 8
#define SRAM_END (0x20000000 + SRAM_SIZE * 1024)
/**
* This function will initial STM32 board.
*/
void rt_hw_board_init()
// rtthread tick configuration
// 2. Configure rtos tick and interrupt
//SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_CONSOLE) && defined(RT_USING_DEVICE)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init((void*)HEAP_BEGIN, (void*)SRAM_END);
#endif
// rtthread tick configuration
// 3. add tick interrupt handler
// tickvoid SysTick_Handler(void)
//
// /* enter interrupt */
// rt_interrupt_enter();
//
// rt_tick_increase();
//
// /* leave interrupt */
// rt_interrupt_leave();
//
void SysTick_Handler(void)
// /* enter interrupt */
rt_interrupt_enter();
//
rt_tick_increase();
//
// /* leave interrupt */
rt_interrupt_leave();
再次编译,烧写程序,LED开始闪烁。
RTT第一次分析
board.c修改后,程序就正常工作了。可是为什么呢?根据经验来说,C程序不是从main开始的么,board中的程序又是何时执行的呢?在main中我们有死循环,如果是从main开始执行的,那么board.c的函数就绝对不可能执行了。
为什么不是从main开始执行的
Ctrl+F搜索rt_hw_board_init函数。发现他在components.c中的rtthread_startup调用,再搜索rtthread_startup结构发现其调用如下:
#if defined (__CC_ARM)
extern int $Super$$main(void);
/* re-define main function */
int $Sub$$main(void)
rt_hw_interrupt_disable();
rtthread_startup();
return 0;
#elif defined(__ICCARM__)
extern int main(void);
/* __low_level_init will auto called by IAR cstartup */
extern void __iar_data_init3( void );
int __low_level_init(void)
// call IAR table copy function.
__iar_data_init3();
rt_hw_interrupt_disable();
rtthread_startup();
return 0;
#elif defined(__GNUC__)
extern int main(void);
/* Add -eentry to arm-none-eabi-gcc argument */
int entry(void)
rt_hw_interrupt_disable();
rtthread_startup();
return 0;
#endif
在上面预处理指令有三段,分别判断三个宏是否被定义——__CC_ARM、__ICCARM__、__GNUC__,这三个是什么呢?如果全局搜索,会发现在core_cm3.h中它们出现很多次了。
ARM 系列目前支持三大主流的工具链,即ARM RealView (armcc), IAR EWARM (iccarm), and GNU Compler Collection (gcc),这三个就是用来指示当前使用的是哪个工具链。因为我们使用的就是RealView(Keil)了。
可以看到**$Super$$main和$Sub$$main**,这又是什么呢?
在某些情况下,无法修改现有符号,例如,由于符号位于外部库或 ROM 代码中。为了解决这个问题,Keil提供了使用 $Super$$ 和 $Sub$$ 模式来修补现有符号的方法。 $Super$$标识的是原函数, $Sub$$标识的是新函数。上面的代码就是它们用法的最好示例了。
extern int $Super$$main(void);
/* re-define main function */
int $Sub$$main(void)
rt_hw_interrupt_disable();
rtthread_startup();
return 0;
这样,程序的执行就不是从用户写的main方法开始了。而是从这个$Sub$$main(void)开始的了。
main是怎么执行的
已经知道了程序不是从main开始执行的是RTT系统作的怪,那么用户写的main方法是何时执行的呢?接着搜索**$Super$$main**,得到其调用如下:
/* the system main thread */
void main_thread_entry(void *parameter)
extern int main(void);
extern int $Super$$main(void);
/* RT-Thread components initialization */
rt_components_init();
/* invoke system main function */
#if defined (__CC_ARM)
$Super$$main(); /* for ARMCC. */
#elif defined(__ICCARM__) || defined(__GNUC__)
main();
#endif
接着搜索main_thread_entry得带代码如下:
void rt_application_init(void)
rt_thread_t tid;
#ifdef RT_USING_HEAP
tid = rt_thread_create("main", main_thread_entry, RT_NULL,
RT_MAIN_THREAD_STACK_SIZE, RT_THREAD_PRIORITY_MAX / 3, 20);
RT_ASSERT(tid != RT_NULL);
#else
rt_err_t result;
tid = &main_thread;
result = rt_thread_init(tid, "main", main_thread_entry, RT_NULL,
main_stack, sizeof(main_stack), RT_THREAD_PRIORITY_MAX / 3, 20);
RT_ASSERT(result == RT_EOK);
#endif
rt_thread_startup(tid);
从名字就可以看得出来,这是在造线程啊,查阅下rtthread的官方文档果然如此。rt_application_init被rtthread_startup调用,然后它创建了一个线程,并在线程中调用了用户定义的main函数。至此就真相大白了。RTT利用工具链提供的方式,替换掉了用户的main,来启动操作系统,并创建了一条线程,在线程中调用了用户的main方法。
至此,RTT操作系统就已经在STM32C8T6核心板上跑起来了。后续使用RTT操作系统得先看下官方文档,然后在使用中实践,在实践中深入理解,以便更快更好的掌握RTT。
以上是关于STM32F103+RTT从零开始——RTT系统中点亮LED的主要内容,如果未能解决你的问题,请参考以下文章