机器人技术创新与实践旧版本大纲
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人技术创新与实践旧版本大纲相关的知识,希望对你有一定的参考价值。
具体参考:
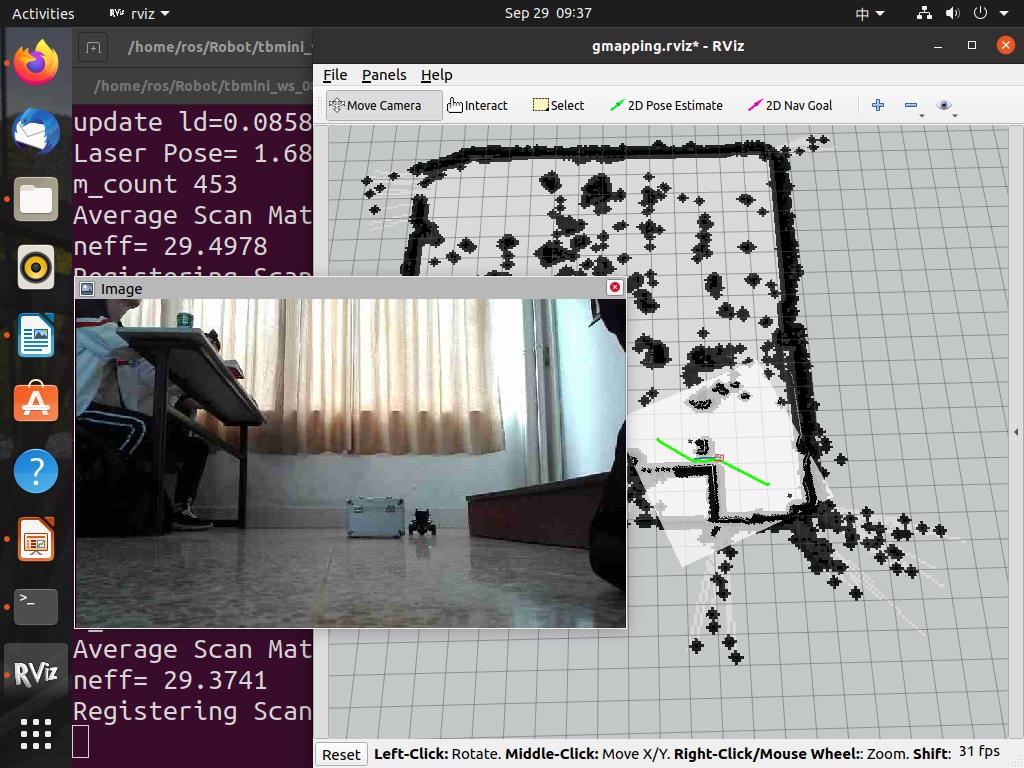
tianbot_mini机器人上手ROS/SLAM/Navigation究竟有多简单???
2017-2018-2019-2020使用此版本(以ROS1为主)。
2021-2022-依据具体情况,做了较多调整。
| 课程编号 | 学分 | 2 | 开课学期 | 6 | |||||||||
| 学时 | 2周 | ||||||||||||
| 课程类型 | 集中实践课程 | 课程性质 | 限选 | 考核形式 | 考查 | ||||||||
| 先修课程 | |||||||||||||
| 适用专业 | 机器人工程 | 开课学院 | 电气与机器人化工程学院 | ||||||||||
| 建议教材 |
| ||||||||||||
| 主要参考书 | (1)Aaron Martinez, Enrique FernANdez,等. ROS机器人程序设计(第二版)[M]. 机械工业出版社, 2017. | ||||||||||||
| 制定人 | 审定人 | 批准人 | |||||||||||
| 修订时期 | 版本 | ||||||||||||
一、课程说明
机器人技术创新与实践课程综合应用机器人相关基础、自动控制理论、传感器技术等课程知识。通过本集中实践课程的训练学习,学生完成一个智能机器人项目的设计、实施,将机器人系统设计与控制技术、人机智能交互技术、机器人感知及信息融合技术融会贯通,能够使学生掌握智能机器人系统的基础理论、技术与方法,巩固和加深对理论知识的理解、增强了学生的应用能力,培养学生解决实际问题的能力,为今后从事工程技术工作、科学研究以及开拓新技术领域,打下坚实的基础。
二、课程目标
1. 能够使用先进软件完成对机器人系统设计和开发(对应毕业要求3.5:能够在设计以工业机器人为主导的先进生产线系统过程中体现创新意识,对已有方法做出评判、改进或创新。)
2. 掌握项目国内外现状,清晰知晓各主流方法的优劣(对应毕业要求10.3:了解国际本行业发展动态,关注本专业国际热点问题。)
3. 对行业软件更新具有较强适应力,对通用方法能够清楚了解其开发流程(对应毕业要求12.2:具备终身学习的知识基础,掌握自主学习的方法,了解拓展知识和能力的途径。)
三、教学内容及基本要求
(1)巩固和加深对课堂所学理论知识的理解,并做到理论联系实际。
(2)培养学生根据实际需要,设计程序和现场调试程序的能力。
(3)进一步熟悉控制系统分析、设计和应用技术。
(4)培养学生实事求是的工作态度,以及利用所学知识分析解决实际应用问题的能力。
(5)培养学生独立科研和团队科研的精神和意识。
1.课程教学内容
本课题针对典型机器人项目控制系统作初步设计和基本研究,提升学生设计开发机器人软件能力。
有11个机器人工程子项目组成。每个项目内容如下:
- 01:使用ROS、OpenCV和Dynamixel Servos进行人脸检测和跟踪;
- 02:在ROS中构建一个像Siri的聊天机器人;
- 03:使用ROS控制嵌入式开发板;
- 04:使用手势远程操作机器人;
- 05:物体检测和识别;
- 06:使用ROS和TensorFlow的深入学习;
- 07:MATLAB和android上的ROS;
- 08:构建自主移动机器人;
- 09:使用ROS创建自动驾驶汽车;
- 10:使用VR头戴设备和Leap Motion远程操作机器人;
- 11:通过网络控制机器人;
ROS机器人项目实践是通过实用的项目学习智能机器人技术的实用课程。本课程需要具备ROS的知识。但是,如果没有ROS的经验,需提前学习。第一课的目标是零基础的初学者。 ROS广泛应用于机器人公司、大学和机器人研究实验室,用于设计和编程机器人。本课的基本目标是通过项目交互讲解ROS。我们在这里讨论的项目也可以在学术或工业项目中重复使用。本课探讨了具有ROS接口的各种新技术。例如,你将看到如何构建自动驾驶汽车的原型,如何使用ROS开发深度学习的应用程序,以及如何在ROS中编写虚拟现实(VR)应用程序。这些只是几个着重提及的主题;此外,你将会发现使用ROS及其库的大约15个项目和应用程序。
在满足预备条件之后使用各类项目。大多数项目可以在没有很多依赖的情况下完成。使用主流和可行的硬件组件来完成大多数项目。因此这使得我们创建几乎所有这些项目时不会遇到太多的困难。
2.课程重点、难点
智能机器人控制系统开发与调试实践,智能视觉系统开发与调试实践,传感检测和数据传输系统开发与调试实践,相关控制系统开发与调试实践,上位机监控系统开发与调试实践等。
3.课程教学要求
(1)初步了解生产线控制系统的设计步骤,掌握系统设计方法,加深对专业理论知识的理解,能够综合运用所学的专业知识进行设备选型和集成。
(2)通过制定智能机器人控制系统设计方案,在设备选型和集成中较全面地考虑开发、运行和维护等要求,达到了解和掌握智能机器人系统综合设计过程和方法的目的。
(3)进行设计基本技能的训练。如:计算、绘图、熟悉和运用设计资料(手册、图册、标准和规范等)以及使用经验数据、进行经验估算和数据处理及计算机应用的能力。
(4)了解先进智能机器人技术的发展前沿,学习和掌握基于机器人和视觉的控制系统组成和工作原理;进一步掌握工业生产线控制系统的设计方法与调试技巧。
(5)培养学生查阅资料的能力和运用知识的能力;提高学生的报告撰写和表述能力;培养学生正确的设计思想、严谨的科学作风;培养学生的创新能力、运用知识和团队协作的能力。
四、课程学时分配
机器人技术创新与实践根据教学计划规定的学时数,时间2周,具体学时分配如下表,供参考。
| 教学内容概要 | 学时 | 教学方式 | 对应课程学习成果 | ||
| 讲课 | 实验 | 实践 | |||
| 11. 实训准备工作 (1)实验室安全教育; (2)实训总体要求; (3)学生领取实训任务,查找相关资料,熟悉实验台。 (4)智能机器人项目需求分析。 | 2 | 2 | 讲授 | 1 | |
| 2. 使用ROS、OpenCV和Dynamixel Servos进行人脸检测和跟踪 可以通过使用ROS和OpenCV库实现一个酷炫的项目。该项目本质上创建了一个人脸跟踪的应用程序,实现了以摄像头始终指向人脸的方式进行人脸跟踪。我们将使用如Dynamixel这样的智能伺服系统使机器人在其轴上旋转。 | 2 | 4 | 讲授、实践 | 2 | |
| 3. 在ROS中实现一个像Siri的聊天机器人 可以很方便地提高机器人的互动性和智能化。该项目在ROS中创建一个可以使用文本或语音进行交流的聊天机器人。如果你想要创建社交或服务机器人,这个项目将会很有用 | 1 | 2 | 讲授、实践 | 2 | |
| 4. 物体检测与识别 介绍检测物体的有趣项目。将学习使用强大的ROS包进行二维和三维物体的识别。。 | 1 | 4 | 2 | ||
| 5.使用ROS和TensorFlow的深度学习 这是一个在机器人上使用前沿技术开发的项目。使用TensorFlow库和ROS,可以实现有趣的深度学习应用程序。可以使用深度学习实现图像识别,本章还有关于使用SVM的应用程序。 | 2 | 实践 | 3、4 | ||
| 6. 通过Web控制机器人 我们将看到如何在ROS中使用rosbridge开发交互式Web应用程序。 | 2 | 实践 | 5 | ||
| 7. 程序调试 对编写的程序进行调试。 | 6 | 实践 | 4、5 | ||
| 8. 撰写智能机器人实训报告及答辩 根据任务课和指导课要求,撰写实训报告,准备答辩。每个学生进行单独答辩,展示控制效果、回答问题 | 4 | 讲授 实践 | 6、7 | ||
| 合 计 | 6 | 26 | |||
五、其他教学环节
1. 实训准备工作(2学时)
(1)实验室安全教育:不仅能保障实验设备的完好,确保实践教学的开展,同时也培养了学生从事电气事业的专业素养。
(2)实训总体要求:提出实训中各方面的要求,明确实训目的和实训过程中的注意事项。
2. 答辩(4学时)
每个学生进行独立的答辩,除了演示综合实训项目的效果以外,还要就实训项目及相关知识回答教师的问题,有利于学生更巩固掌握机器人。
六、教学管理
1. 训练项目和学时分配:根据专业培养计划、根据学生能力和接受程度,任课教师可为其选用实训指导课中的实训项目或在要求上作一定修改,各实训教学单元的学时分配可根据需要作调整。
2. 本实训的整个教学采用教师讲授、学生动手操作、教师再指导并进的教学方法。
3. 本课程采用现场教学方式,由教师指导学生进行现场实践教学,鼓励学生自主自学,培养学生的自学能力,充分调动学生学习的主观能动性。
七、考核方法
1、考核说明
本课程的学生成绩由平时成绩、答辩汇报、研究报告三部分组成,其中平时成绩占总成绩的30%,答辩汇报占总成绩的30%、研究报告占总成绩的40%。平时成绩由平时测评(占总成绩的10%)、阶段性学习报告(占总成绩的20%)综合评定。具体考核环节和考核比例见下表。
| 考核环节 | 平时成绩(30%) | 答辩汇报 (30%) | 研究报告 (40%) | 合计 | |
| 平时测评 | 阶段性学习报告 | ||||
| 考核比例 | 10% | 20% | 30% | 40% | 100% |
系统运行演示评分标准:
综合实训报告考核标准如下表所示。
实训报告成绩考核标准
| 序号 | 要求 | 分值 | |
| 1 | 需求分析 | 根据实训任务课,根据生产工艺流程要求,进行需求分析;(无0分;简单3分;详细5分) 体现运用标准、规范、手册、图册和采用各种手段获取有关技术资料的能力。(无0分;简单3分;详细5分) | 10分 |
| 2 | 关键环节分析 | 能根据任务识别系统的关键环节;(无0分;简单3分;详细5分) | 5分 |
| 3 | 初步方案的形成及选型 | 能根据需求分析确定控制指标要求;(无0分;简单3分;详细5分) 初步方案有多种可选择,并经过分析确定最佳方案,并确定选型。(无0分;简单3分;详细5分) 能对关键环节进行正确的分析,并提出解决方案。(无0分;简单3分;详细5分) | 15分 |
| 4 | 算法设计及集成 | 按规范要求绘制控制原理图、电气接线图,并根据所设计的电路图连接电路,并能根据该网络控制要求,连接通信网络。(无0分;简单3分;详细5分) 具有工位,检测点,气路,电路符号;具有测量值,给定值,控制量动态点; 控制器、扩展模块、传感器等的选择、安装。(无0分;简单3分;详细5分) | 10分 |
| 5 | 软件设计及调试 | 绘制程序控制流程图,确定机器人的I/O,编写满足生产和控制要求的机器人的控制程序,并对程序进行注释及说明。(无0分;简单3-5分;详细6-10分) 操作程序、安全运行、紧急情况处理。(无0分;简单3-5分;详细6-10分) | 20分 |
| 6 | 分组情况 个人技术能力 | 每个成员的任务;(无0分;简单3分;详细5分) 需要小组成员讨论完成的任务。(无0分;简单3分;详细5分) | 10分 |
| 7 | 系统运行演示与答辩 | 根据生产工艺,系统安装及调试;管理员和操作员登录功能,手/自动切换。(无0分;简单3-5分;详细6-10分) 沟通与表达。(无0分;简单3-5分;详细6-10分) | 20分 |
| 8 | 上位机监控、系统联调与改进 | 上位机参数设置、安全启停、运行测试、分析;(无0分;简单3-5分;详细6-10分) 运行分析及改进;(无0分;简单3-5分;详细6-10分) | 10分 |
考核说明:《课程考核方案一览表》表达的对应关系,能够证明学生通过本课程考核成绩合格,即可达到课程目标的要求。
2、课程目标考核方案一览表
考核说明:《课程目标考核方案一览表》表达的对应关系,能够证明学生通过本课程考核成绩合格,即可达到课程目标的要求。
课程目标考核方案一览表
| 课程支撑的毕业要求序号 | 课程目标序号 | 考核内容 | 考核形式 | 考核原始材料(说明:试卷、作业、实验报告、技术报告、过程记录、实习总结等,纸质或电子) |
| 3.5 | 课程目标1 | 能够使用先进软件完成对机器人系统设计和开发 | 研究报告 | 技术报告 |
| 10.3 | 课程目标2 | 掌握项目国内外现状,清晰知晓各主流方法的优劣 | 答辩汇报 | 答辩总结 |
| 12.2 | 课程目标3 | 对行业软件更新具有较强适应力,对通用方法能够清楚了解其开发流程 | 学习报告 | 技术报告 |
以上是关于机器人技术创新与实践旧版本大纲的主要内容,如果未能解决你的问题,请参考以下文章