《协同式智能清漂子母船》——第十四届国际水中机器人大赛---国赛亚军
Posted zhaohaobingSUI
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《协同式智能清漂子母船》——第十四届国际水中机器人大赛---国赛亚军相关的知识,希望对你有一定的参考价值。
《协同式智能清漂子母船》——第十四届国际水中机器人大赛—国赛亚军
文章目录

摘要:
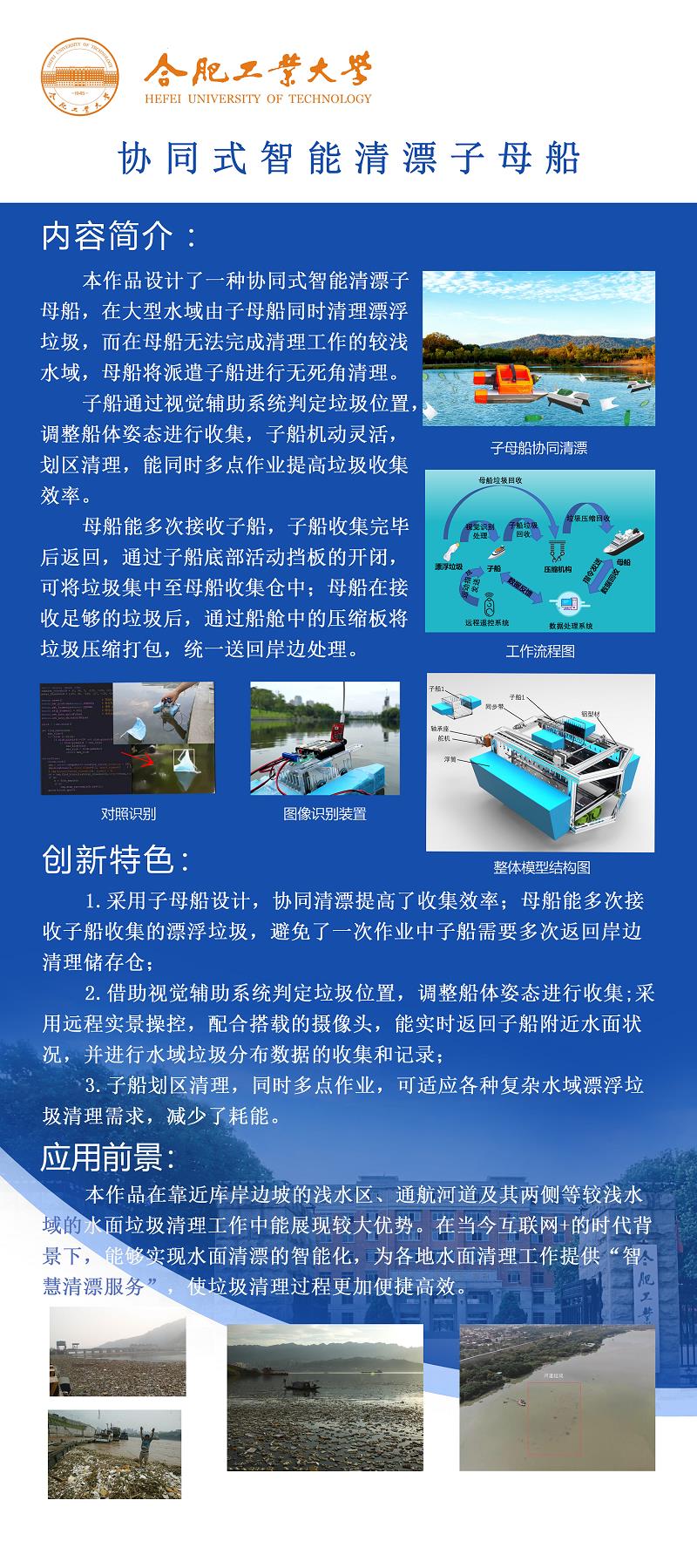
水库、湖泊等水域在降雨和人类活动的作用下经常会聚集大量漂浮垃圾,严重影响水利枢纽正常运行,以及水域和周边的生态环境健康。如何适应各种水域特征,及时而高效安全的清除漂浮垃圾仍然是亟需解决的问题。针对此问题,本作品设计了一种子母船,在大型水域由母船直接清理漂浮垃圾,而在母船无法完成清理工作的较浅水域,母船将派遣子船进行清理。同时,本作品采用自流式船体结构和太阳能电池板,利用了无污染的水能和太阳能,并省去了主流清污船所使用的复杂机械打捞结构,绿色环保,具有较高的实际应用价值。
关键词:
子母船;漂浮垃圾;浅水域清漂;智能控制;图像识别
Abstract:
under the action of rainfall and human activities, reservoirs, lakes and other water areas often gather a large amount of floating garbage, which seriously affects the normal operation of water conservancy projects and the health of water areas and surrounding ecological environment. How to adapt to the characteristics of various waters and remove floating garbage timely, efficiently and safely is still an urgent problem to be solved. To solve this problem, a seed mother ship is designed in this work. In large water areas, the mother ship will directly clean up floating garbage, while in shallow water areas where the mother ship cannot complete the cleaning work, the mother ship will send a sub ship to clean up. At the same time, this work adopts gravity flow hull structure and solar panel, makes use of pollution-free water energy and solar energy, and eliminates the complex mechanical fishing structure used by mainstream sewage cleaning ships. It is green and environmentally friendly, and has high practical application value.
Key words:
sub mother ship; floating garbage; Shallow water garbage cleaning; intelligent control; image recognition
0 引言
随着我国社会的进步,漂浮垃圾逐渐增多,传统的水面垃圾清理方式存在着清理死角大,清理成本高等特点,因此,在一些大型水工建筑和岸边湖边存留了大量难以打捞的漂浮垃圾,这些垃圾若不加以清理,势必会影响生态平衡,严重影响库区及水电站水上航运和水电站安全稳定运行,甚至造成更为严重的经济损失与环境破坏,基于该现状,本文提出了一种相较于传统清漂方式成本较低,效率较高,且更为智能化的协同式智能清漂子母船设计。
1 研究背景
随着我国社会的进步,生活水平的提高,生活垃圾也随之增多,很多垃圾不可避免的进入河流、湖泊,形成水面漂浮物,再加上各种自然垃圾的产生,若不加以清理,势必会影响生态平衡,严重影响库区及水电站水上航运和水电站安全稳定运行,产生对坝体及附属金结设备造成破坏的严重后果(如图1所示)。
据调查,水库与湖泊垃圾的产生源主要有以下四种:(1)沿岸城镇产生的生活垃圾。(2)农作物秸秆、树木枝叶与地表植被等。(3)过往船舶排放的垃圾。(4)蓝藻,建筑材料等其他垃圾[1]。其中塑料类垃圾种类最多,占比62.1%,木质类、织物类分别占13.7%、6.9%,其他垃圾占比较少。

图1 垃圾分布图
而针对这些库区水面漂浮垃圾主要的清理方式有人工打捞和机械打捞,传统的人工打捞方式劳动强度大、环境恶劣、效率低下,而且存在一定的危险性,且由于漂浮物中存
在很多瓶子、盒子等塑料制品,未被压缩的瓶体会占用很多船体空间,导致船体无法装载更多的垃圾,进一步降低效率;机械打捞主要以清漂船为主,而现有的清漂船多为大型船只,无法适应靠近库岸边坡的浅水区、通航河道及其两侧、坝后回水区等水深较浅水域的垃圾清理,并且功能单一、较为笨拙[2]。
现有清漂船主要有传送带式、机械臂翻斗式、泵吸式,其特点对比如图1所示。
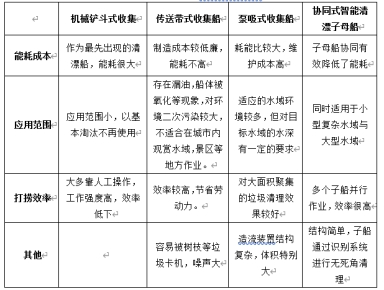
图1 清漂方式对比
本小组拟设计一种适用于大小水域,收集能力强,自动化程度高的协同式智能清漂子母船,可实现对不同类型水域漂浮物低耗能、高效率的清理。
2 设计原理
2.1 整体设计思路
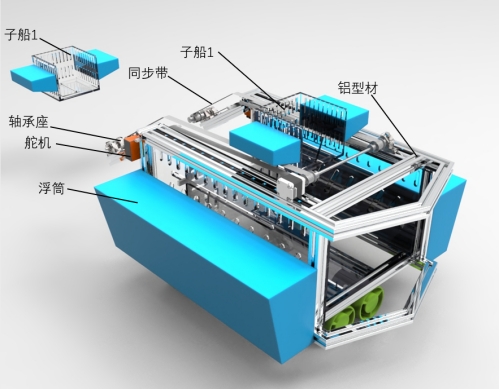
该子母船清理垃圾时可以协同作业(整体结构图如图2、附图1所示),在大型水域由母船直接清理漂浮垃圾,而在母船无法完成清理工作的较浅水域,母船将派遣子船进行清理,子船通过视觉辅助系统,通过相关算法判定位置,调整船体姿态进行收集,每次作业监测所得的垃圾分布等数据将被记录并用于改进下一次作业;子船机动灵活,划区清理,能同时多点作业提高垃圾收集效率,可满足各种复杂水域漂浮垃圾清理的需求;母船能多次接收子船,子船收集完毕后通过传送带被提升至母船顶部,通过子船底部活动挡板的开闭,可将垃圾集中至母船收集仓中;母船在接收足够的垃圾后,通过船舱中的压缩板将垃圾压缩打包,统一送回岸边处理,避免了一次作业中清漂船需多次返回岸边清理储存仓的情况,实物图如附图2所示。
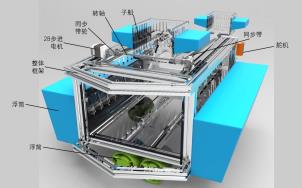
图2 整体模型图
2.2 作品功能简介
协同式智能清漂子母船功能主要包括:漂浮垃圾自主识别功能、自动收集漂浮垃圾功能、子船返航、子船垃圾倾倒功能、收集舱压缩垃圾功能等。
(1)漂浮垃圾自主识别功能
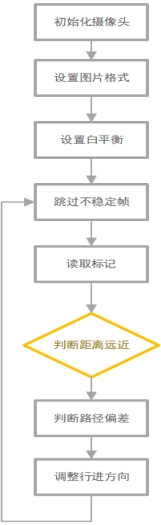
为使子母船适应更多特殊清理环境的需求,加入了视觉辅助系统。Open MV是一个基于STM32F7处理器的单片机和OV2640图像传感器的开源型微型机器视觉模块。图像处理大致流程如下:首先,对采集到的源图像进行彩图双边滤波,去除水面的波纹和光线的影响,接着通过反转阈值寻找色块,找到漂浮垃圾的位置并用矩形框标注出来(如图3所示)。视觉识别辅助软件流程图见附图4。
母船使用树莓派4B搭载YOLOV5-LITE神经网络模型,通过实拍、飞桨数据集、python网络爬虫算法,获取近万张水面垃圾图像;通过labellmg标签标记软件进行分类标定,并使用yolo5s预网络模型进行深度监督学习,将识别结果融合mean-shift滤波,模型准确度达到0.996;通过opencv实现tracking-by-detection算法,对当前帧对目标区域建模,下一帧寻找与模型最相似的区域作为预测位置,进而给主控返回识别对象的位置信息。
在实际运作过程中,对于近距离的水面漂浮物,操作者可用肉眼简单直观判断漂浮物所在位置,然后通过遥控调整船体姿态进行收集。通常情况下,对于稍远的漂浮物,操作者不易通过肉眼判断位置, 此时就要借助于视觉处理的辅助,操作端摄像头传回的图像可显示船体第一视角,通过相关算法判定位置,用矩形框标注出来,操作者通过传回并标注好的图像,遥控调整船体姿态进行收集。视觉处理为操作者起到视觉辅助作用,使垃圾清理过程更加便捷高效,实物图如附图3所示。
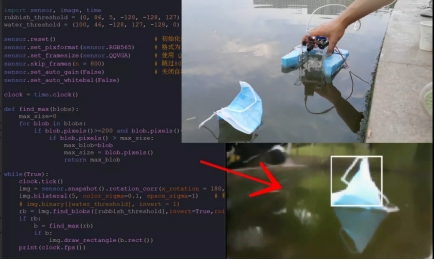
图3漂浮垃圾识别演示
(2)自动收集漂浮垃圾功能
子船与母船上都装载了自动开合舱门,该舱门可以通过远程遥控开启,进行垃圾回收,或当Open MV检测出成像范围内存在漂浮垃圾时,自动打开舱门进行垃圾的收集[5]。舱门的开合由舵机控制,辅助船只收集漂浮垃圾,同时防止收集到的垃圾因为水流波动而流出,造成二次污染。
(3)子船返航
子船在返航过程中,正面朝向母船加装的同步带及同步带轮(LE-MXL-A),通过28步进电机带动同步带轮顺时针的运动,使同步带紧边处于上方,在同步带轮距离固定的情况下,调整角度确定预紧力,避免子船传送至母船上会产生打滑等动作,提高子船返航的可行性(如图4、5所示)。同时,通过子船加装的Open MV摄像头模块,达到辅助小船对准母船传送带的目的。
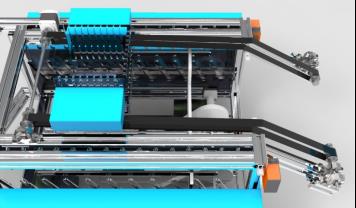
图4 同步带传送机构
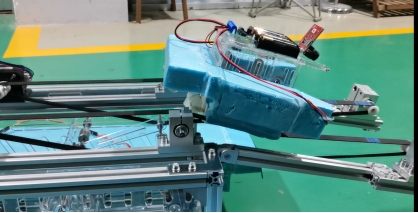
图5 子船上升至母船顶部
(4)子船垃圾倾倒功能
在子船传送到母船上以后,通过小船上的塑料舵机,控制小船底板的旋转运动,让小船中收集到的垃圾掉落至下方母船的垃圾收集舱,使小船在母船上可以实现将收集到的水面垃圾集中处理的目的。
(5)收集舱压缩垃圾功能
收集舱中使用后板的前后往复运动实现垃圾压缩功能。其中,通过曲柄滑块的抽象应用,以压缩板作为滑块,舵机连接在连杆1上,连杆2连接舵机、压缩版。通过确定的传递函数,将舵机120°的旋转运动转换为滑块的前后往复运动,以此达到垃圾压缩的功能,减小垃圾的体积,充分利用收集舱空间,提高垃圾清理效率,机械原理如图6所示[6]。
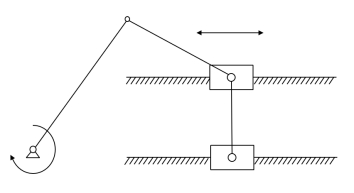
图6 压缩机构运动简图
3 创新特色
3.1 采用子母船设计
子船机动灵活,能同时多点作业,可适应各种复杂水域漂浮垃圾清理需求;母船能多次接收子船收集的漂浮垃圾,避免了一次作业中清漂船需要多次返回岸边清理储存仓的情况;
3.2 采用远程实景遥控及视觉辅助系统
配合搭载的摄像头,能实时返回子船附近水面状况;借助视觉辅助系统,通过相关算法判定位置,遥控调整船体姿态进行收集,使垃圾清理过程更加便捷高效;
3.3 设计了子母船协同控制算法
母船派遣出多个子船后,可以通过子母船上搭载的蓝牙模块进行实时通信,有母船向发出水域清理任务,子船执行并进行识别,反馈给母船是否返航,收集垃圾类型以及水域状况等信息,以便实现高效的垃圾清理工作。
4 应用前景
本作品设计的协同式智能清漂子母船能够实现清理垃圾的智能化,减少人工的参与;提高了收集效率和作业范围。基于以上优势,该协同式智能清漂子母船可适用于靠近库岸边坡的浅水区、通航河道及其两侧、坝后回水区等水深较浅水域的垃圾清理,可适用小型水域以及库区的水面垃圾清理工作,构建了水上垃圾回收系统,有望更有效解决水库、湖泊以及各种水工建筑物前漂浮垃圾的及时高效清理问题,保证水利工程正常安全稳定运行,改善相关水域环境。
参考文献
[1] GBT 37615—2019,海面漂浮物清扫船技术要求[S]. 北京:中国国家标准管理化委员会,2020.
[2] 金聪,张吉萍. 小水域智能垃圾清理船的设计与性能测试[J]. 中国水运,2019,7:4-5.
[3] 原建洋,窦岩,王少文, 刘赛赛. 市面上典型水面垃圾清理船对比研究[J]. 科技创新导报,2019,7:66-68.
[4] 汤伟,高涵,刘思洋. 基于树莓派的小型水域智能垃圾清理机器人系统设与实现[J]. 科学技术与工程, 2019,34.
[5] 张彦,王恒涛,李慧媛. 基于自感控一体的多功能绿色清漂船设计与研究[J]. 船舶工程,2020,11.
[6]刘英. 基于MSP430F149 的水上漂浮垃圾打捞船模[J]. 化学工程与装备,2019,11:265-267.
无人船实物展示
附图1 整体模型结构图
附图2 母船实物图

附图3 子船实物图

附图4 视觉识别软件流程

 创作打卡挑战赛
创作打卡挑战赛
 赢取流量/现金/CSDN周边激励大奖
赢取流量/现金/CSDN周边激励大奖
以上是关于《协同式智能清漂子母船》——第十四届国际水中机器人大赛---国赛亚军的主要内容,如果未能解决你的问题,请参考以下文章