SLAM---地图
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了SLAM---地图相关的知识,希望对你有一定的参考价值。
文章目录
1.地图分类
移动机器人常见的地图有三种:尺度地图、拓扑地图、语义地图。
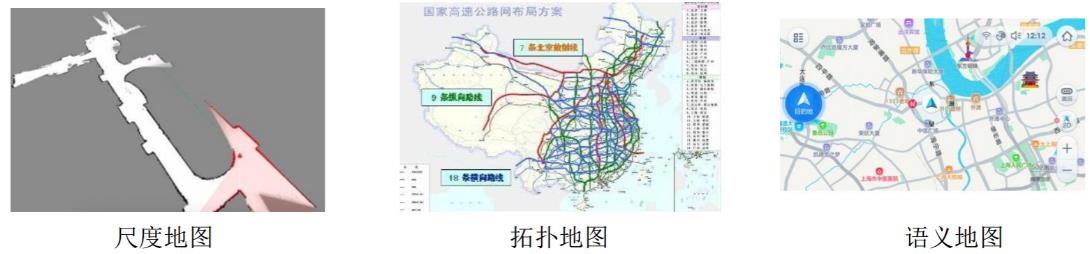
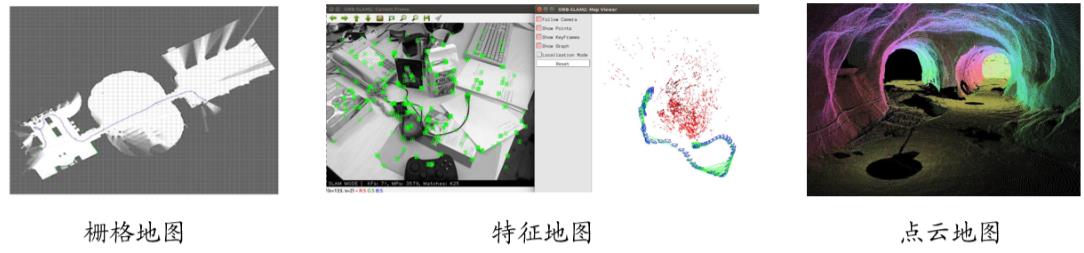
尺度地图:具有真实的物理尺寸,如栅格地图、特征地图、点云地图;常用于地图构建、定位、SLAM、小规模路径规划。 拓扑地图:不具备真实的物理尺寸,只表示不同地点的连通关系和距离,如铁路网,常用于超大规模的机器人路径规划。 语义地图:加标签的尺度地图,公认SLAM的未来—SLAM和深度学习的结合,常用于人机交互。 其中对尺度地图进行补充说明,如下图所示。
不同算法构建的环境地图类型不相同,其应用的场景也不同。
地图包含的信息是运动规划模块的输入,因此从利于运动规划的角度分析,表 3 1从地图重构效率、环境内容完整性及碰撞检测效率等方面对比了多种类型的地图。
栅格地图及特征地图是传统激光SLAM算法中常用的地图类型,常被应用于室内导航系统,能够较准确描述环境几何信息,但缺乏语义信息限制了机器人智能化水平。
几何语义地图可提供目标物体类型、空间形态及位置,以及机器人在地图中的位置,但目前仅能使用单一几何体,同时受到深度学习的计算需求与硬件计算能力制约。
因此,构建、存储、运用一个可用、普适、简洁的语义地图,解决传统地图存在的冗余性、时效性问题,以提高机器人与不同环境的交互能力,是当前研究趋势之一。

2. 栅格地图概述
机器人学中地图的表示方法有四种:特征地图、拓扑地图、栅格地图以及直接表征法(Appearance Based Methods),栅格地图则是把环境划分成一系列栅格,其中每一栅格给定一个可能值,表示该栅格被占据的概率。
栅格的示意图
当我们身处异常,导航软件和户外地图成为我们找路最有利的工具,服务机器人和人类一样也需要依靠地图来感知外部的环境,通过算法与传感器差异的不同机器人会采取不同的地图描述形式。而栅格地图是目前机器人使用最广泛的地图存储方式。
栅格地图就是把环境划分成一系列栅格,其中每一栅格给定一个可能值,表示该栅格被占据的概率。这种地图看起来和人们所认知的地图没什么区别,它最早由NASA的Alberto Elfes在1989年提出,在火星探测车上就用到过,其本质是一张位图图片,但其中每个“像素”则表示了实际环境中存在障碍物的概率分布。一般来说,采用激光雷达、深度摄像头、超声波传感器等可以直接测量距离数据的传感器进行SLAM时,可以使用该地图。这种地图也可以通过距离测量传感器、超声波(早期)、激光雷达(现在)绘制出来。
3. 占据栅格地图构建算法
占据栅格地图(Occupancy Grid Map)构建算法构建的是栅格地图,这里占据栅格地图中的占据是指往栅格地图中每个栅格填写数据,0标识无障碍物,1表示有障碍物。
3.1 为什么使用占据栅格地图构建算法构建地图?
在开始讲解之前,我们要明确一些事情。 第一,构建栅格地图需要使用激光雷达传感器。 第二,激光雷达传感器是有噪声存在的,通俗的说,“不一定准”。 举个例子,机器人在同一位姿下的不同时刻,通过激光雷达对一个固定的障碍物的探测距离不一致,一帧为5m,一帧为5.1m,我们难道要把5m和5.1m的位置都标记为障碍物?这也就是使用占据栅格地图构建算法的原因。
3.2 什么是占据栅格地图构建算法
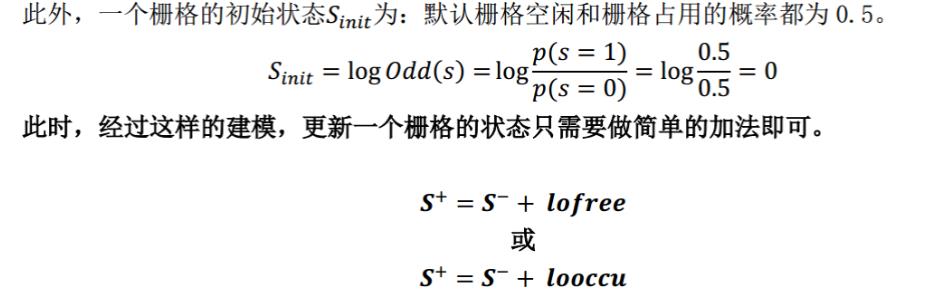
为了解决这个问题,引入了占据栅格地图(Occupancy Grid Map)的概念。我们将地图栅格化,对于每一个栅格的状态要么占用,要么空闲,要么未知(即初始化状态)。
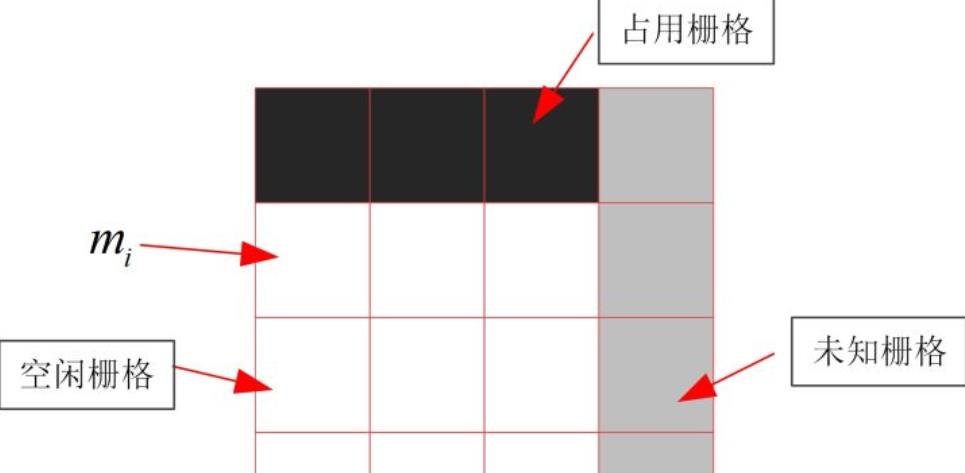
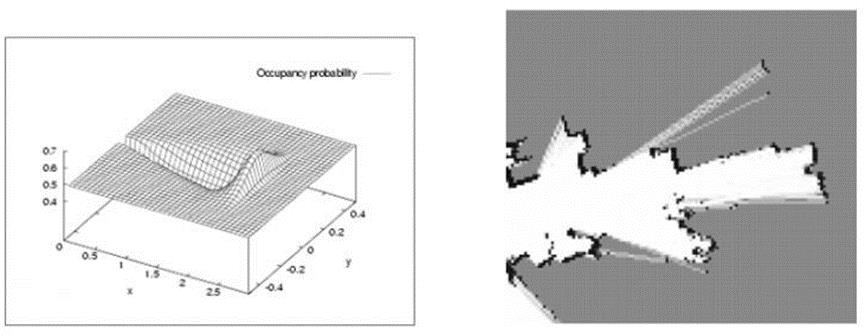
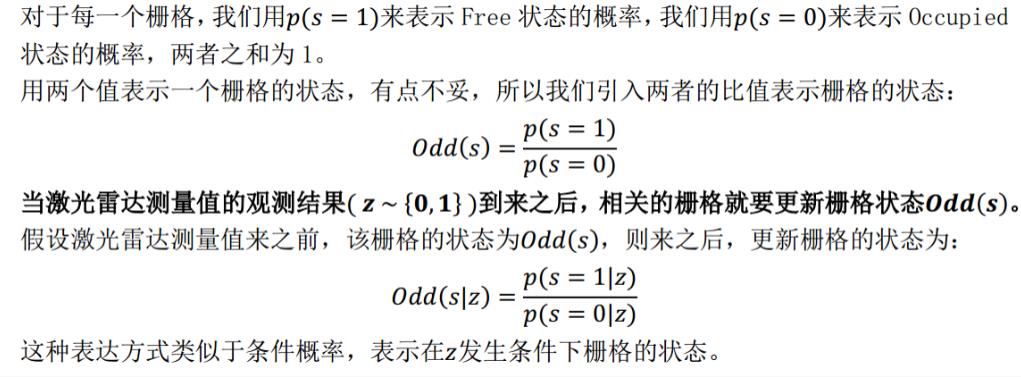
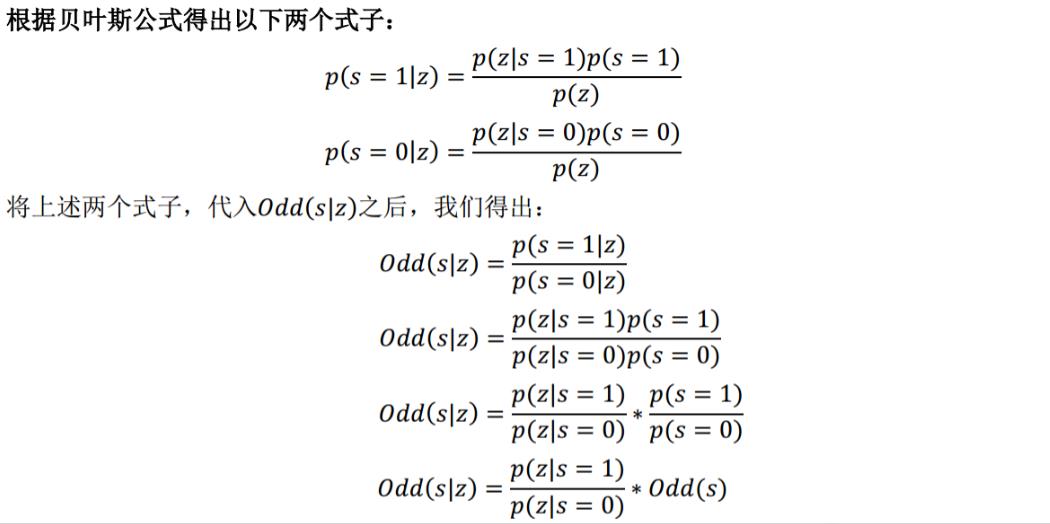
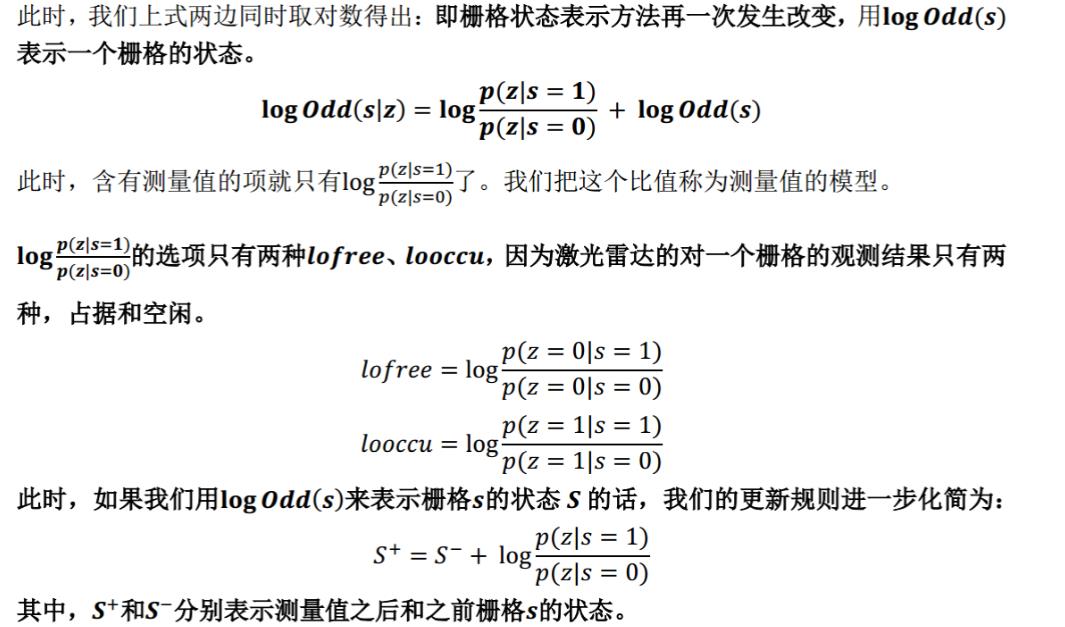
关于占据栅格地图构建算法的引出、推导、演化,从下面的图片得出
3.3 验证栅格地图构建算法
参考链接
小白学移动机器人占据栅格地图构建
以上是关于SLAM---地图的主要内容,如果未能解决你的问题,请参考以下文章