ROS机器人系列竞赛之地下挑战赛 The DARPA Subterranean (SubT) Challenge Competition
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS机器人系列竞赛之地下挑战赛 The DARPA Subterranean (SubT) Challenge Competition相关的知识,希望对你有一定的参考价值。
这个挑战赛有完整的教程:
- github.com/osrf/subt_hello_world
谷歌翻译截图如下:
仿真是基础,仿真不过瘾的话嘛,真实场景更加酷炫!!!
参考:www.openrobotics.org/blog/2021/9/27/darpa-subt-final-competition
入口

洞穴实景



场景一应俱全啊,全景图如下:

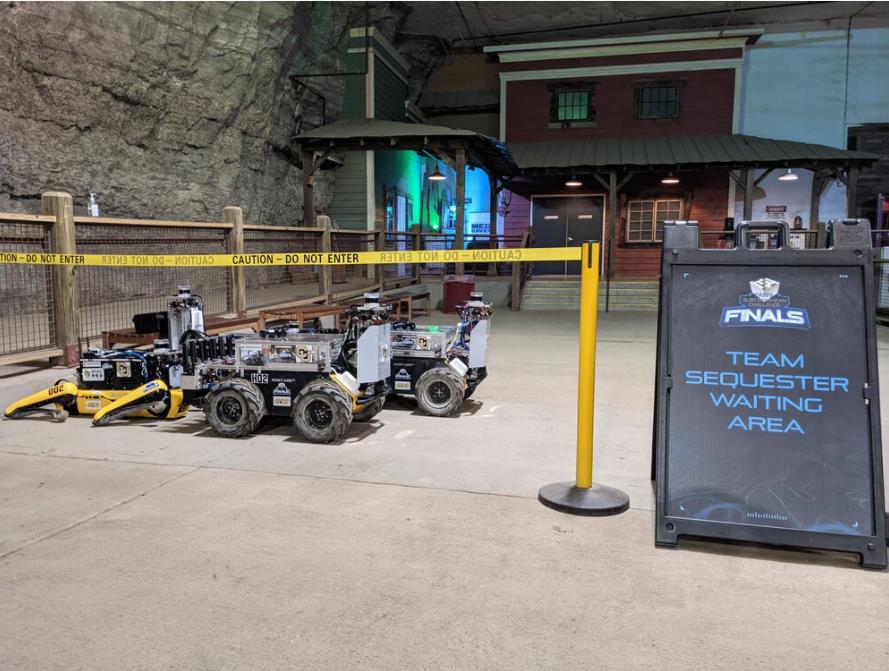
主角,酷炫的机器人!





DARPA SubT 总决赛(谷歌翻译)
DARPA 地下 (SubT) 挑战赛决赛赛事于2021年 9 月 21 日至 9 月 24 日在路易斯维尔巨型洞穴举行。这标志着 SubT 的高潮,它始于 2018 年,由跨越各种物理和虚拟比赛场景的多项比赛组成。我们要祝贺所有参赛者的辛勤工作和创新;并识别获胜的团队,系统竞赛中的 CERBERUS 团队和虚拟竞赛中的 Dynamo 团队。
SubT 竞赛的首要目标是开发能够绘制和搜索复杂地下环境的机器人解决方案。SubT 是 DARPA 机器人挑战赛的最新版本,之前的项目包括 DARPA 机器人挑战赛(人形机器人)、DARPA 城市挑战赛(自主城市驾驶)和 DARPA 大挑战赛(自主地面车辆)。该挑战旨在模拟危险的地下紧急情况中的条件,例如倒塌的矿井或洞穴、飓风期间受损的地铁或熔毁后的核电站。最后的比赛汇集了前三场比赛的各个方面,并以城市、洞穴和采矿地下勘探为特色。
SubT 参赛者必须部署一个机器人团队来探索三种不同类型的环境,包括隧道、洞穴和城市。人工制品遍布整个环境。成功地识别出距地面真实姿势 5 米范围内的工件的位置将为团队赢得 1 分。得分最多的队伍获胜。虽然这场比赛听起来相对简单,但对于大多数机器人来说,这项任务实际上相当困难。困难是由一系列因素造成的,包括缺乏 GPS 接收、黑暗和尴尬的地形,以及难以与机器人操作员建立无线连接。DARPA 发布了这个隧道巡回赛课程的视频,很好地概述了他们想要探索的复杂环境。
第一名和第三名之间仅差几分,SubT 挑战的系统田径队之间的竞争非常激烈。看到团队策略是如何由团队机器人的组成和能力决定的,真是令人着迷。如果您不熟悉这些团队,我们早在 2020 年 2 月就报道了城市比赛,并且IEEE Spectrum在最终比赛之前写了每个团队的详细描述。由于比赛的性质或在比赛中的作用,我们不得不让球队保持一定距离;所以我们对机器人上使用的软件有效载荷知之甚少。我们怀疑大多数(如果不是所有)团队都以某种身份使用 ROS。看第一名和第二名的有腿平台Anymal和Spot都支持 ROS 接口,CSIRO发布了一份早期竞赛的白皮书,说明他们使用了 ROS。再往下,现场团队 MARBLE、CTU-CRAS-NORLAB 和 CoSTAR 都大量使用了也广泛使用 ROS 的 Clearpath Husky 机器人。我们热切地等待团队的最终白皮书,在那里我们将了解更多关于他们的软件堆栈的信息;如果我们幸运的话,他们开发的一些软件将会进入开源社区。
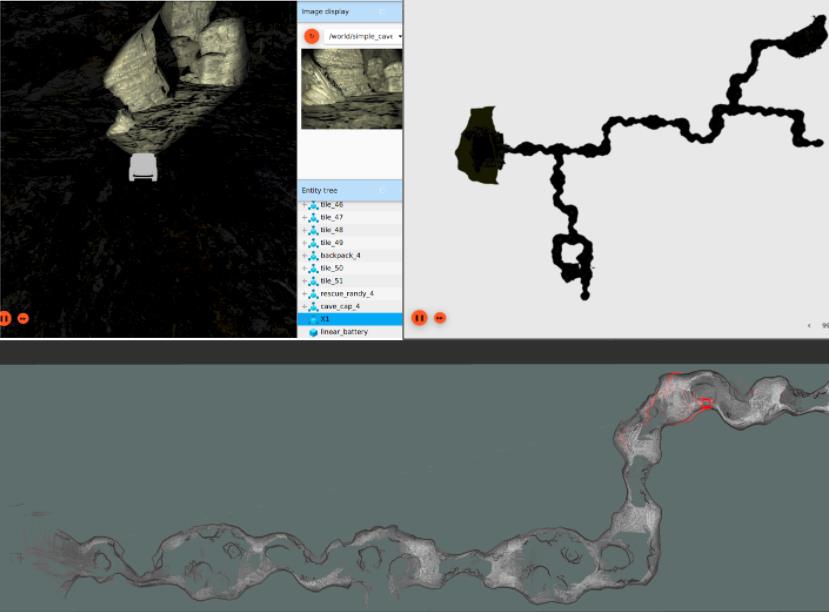
面对面的比赛只是 DARPA 的 SubT 挑战赛的一个方面。SubT 还举办了一场以高保真模拟进行的虚拟比赛。这种虚拟比赛通过消除参赛队伍拥有物理机器人的需要,降低了 SubT 的进入门槛;相反,我们在 Gazebo 中为比赛创建了一个详细的模拟。这些模拟让任何拥有计算机的人都有机会参加 SubT 比赛。大多数虚拟赛道的参赛者都是非 DARPA 直接赞助的研究和学术团体。我们为 SubT 创建的 Gazebo 模拟几乎在每个细节上都反映了现实世界的比赛,因为我们使用最新的摄影测量和激光扫描技术克隆了比赛场地和机器人。为了进一步增强这些模拟的真实性,我们开发了 Gazebo 插件来复制特定于比赛的各种效果。例如,SubT 环境中的网络连接受到限制——WiFi 无法穿透坚硬的岩石——因此我们必须开发 Gazebo 插件来复制地下的条件。我们创建的其他插件包括一个热像仪,用于检测受伤的人和由机器人运动触发的动态落石。我们制作了模拟机器人和练习环境 我们创建的其他插件包括一个热像仪,用于检测受伤的人和由机器人运动触发的动态落石。我们制作了模拟机器人和练习环境 我们创建的其他插件包括一个热像仪,用于检测受伤的人和由机器人运动触发的动态落石。我们制作了模拟机器人和练习环境使用 SubT 门户和Ignition Fuel(我们基于 Web 的模型存储库)随时可供公众使用。为了方便竞争对手,我们使用 ROS 创建了一些示例和教程,介绍如何开始创建自己的虚拟 SubT 机器人。总而言之,已经为 SubT 创建了 200 多个新模型,所有这些模型都可以在SubT Tech Repo上免费获得。SubT Challenge 模拟器的源代码以及教程和文档可以在https://github.com/osrf/subt找到。
在 SubT 决赛之前举行了三场虚拟巡回赛。每个电路都覆盖了具有不同操作考虑的不同地下域。按顺序,巡回赛是隧道、城市和洞穴。隧道域代表类似于矿山的人造粗糙地下环境。城市环境也是人造的,但类似于地铁和较低层的建筑物。洞穴环境是天然的非结构化地下环境。
我们在 Cloudsim 上运行了三个虚拟电路和虚拟决赛,Cloudsim是我们在云基础设施上托管 Ignition Gazebo 的开源平台。对于虚拟决赛,我们使用 1824 台云机器执行 7781 小时的计算,以模拟部署在 9 个团队中的 58 个机器人(37 个空中/21 个地面)。穿越 8 个不同的世界超过 12,000 公里。在 SubT 比赛的过程中,我们调整和改进了 Cloudsim 以满足程序不断变化的需求。例如,为了最终完成,我们在 Cloudsim 中添加了模拟录制功能,以允许在最终比赛期间播放虚拟比赛。活动期间DARPAtv的这个片段很好地描述了模拟比赛的范围和规模。虚拟比赛的完整结果可以在DARPA 排行榜上找到。
除了因新冠肺炎导致的洞穴赛道外,每个虚拟赛道事件都伴随着真实世界的系统轨迹;也就是说,Cave Circuit 完全是虚拟的,并且只在 Cloudsim 上运行。Open Robotics 使用 Cloudsim 和 Gazebo 直接协助进行虚拟电路比赛;ROS被大量竞争对手使用。我们参加 DARPA SubT 竞赛对进一步提升 ROS 和 Gazebo 的能力做出了很大贡献;并创造了新一代有才华的机器人专家,他们将他们的学术研究应用到现实世界的场景中。由于要使 SubT 成为现实,需要对 ROS、Gazebo 和 Cloudsim 做出大量开源贡献,因此该事件的影响将在未来几年内显现出来。SubT Virtual Testbed等贡献、SubT Hello World Repo以及Ignition Fuel 上可用的 SubT 机器人和模型将对我们的开源社区产生持久的积极影响。我们为 DARPA SubT 对开源和机器人领域产生的积极影响感到自豪,我们很高兴看到接下来会发生什么。
以上是关于ROS机器人系列竞赛之地下挑战赛 The DARPA Subterranean (SubT) Challenge Competition的主要内容,如果未能解决你的问题,请参考以下文章