让研究生给你讲讲GPS越野车模运动控制
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了让研究生给你讲讲GPS越野车模运动控制相关的知识,希望对你有一定的参考价值。
简 介: 针对参加大学生智能汽车竞赛同学询问GPS如何导航车模运行的问题,让研究生给出参赛队伍写一个简要说明文档。显然他没有能够把信息传递对象(参赛同学)搞明白,直接就按照学术论文格式进行阐述,显然这对于他来说是很方便,但对于听他讲思路的同学会带来一定的困难。这显示了学术交流与课程讲解在方法、任务、目标方面的差异。按照研究生的解释恐怕会把参赛同学们的热情给消磨殆尽了。
关键词: GPS,智能车竞赛,研究生
§01 GPS导航
1.1 问题提出
卓老师,如何使用GPS导航,使得小车跑起来? 现在我一点思路都没有。

▲ 图2.1.1 GPS 控制车模运行
1.2 问题回答
关于你的问题,昨天我让一位研究生同学起草一个简单的描述文档,向一位没有任何思路的低年级同学讲清楚如何通过GPS对车模进行导航。结果呢? 他给我发送了如下的说明。 说实在的,如果你能够看明白,估计早就有了控制思路。
1.2.1 研究生给出的讲解
(1)问题描述
假设车模比赛路径由一组二维空间的点组成,表示为 P ∈ N × R 2 P \\in N \\times R^2 P∈N×R2 。路径点 x ⃗ d \\vec x_d xd 和 x ⃗ d + 1 \\vec x_d + 1 xd+1 是路径中第𝑖和第 i + 1 i + 1 i+1 个航路点,它们连接成为航段 P ⃗ i \\vec P_i Pi 。矢量 t ⃗ \\vec t t 表示从航路点 x ⃗ d \\vec x_d xd 指向 x ⃗ d + 1 \\vec x_d + 1 xd+1 的单位矢量; v d v_d vd 为航段 P ⃗ l \\vec P_l Pl 上的期望速度; x ⃗ \\vec x x 为无人车当前时刻位置(矢量); v ⃗ \\vec v v 为无人车当前时刻速度(矢量)。
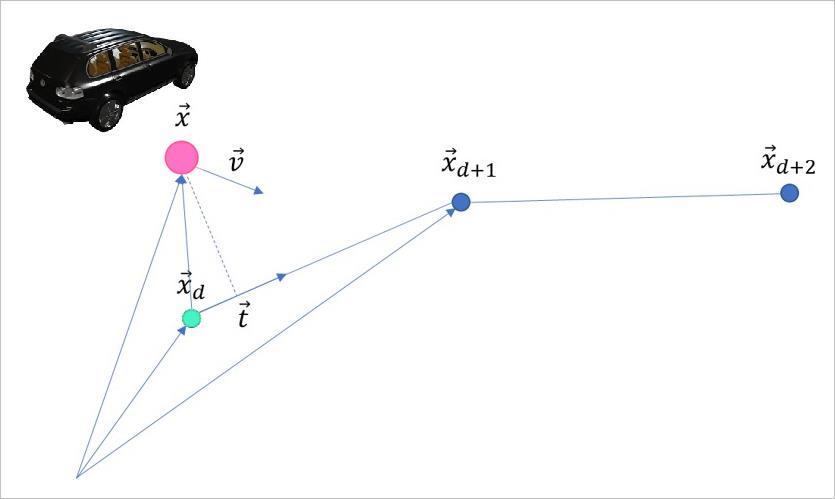
▲ 图2.1 车模运行模型
(2)问题求解
基于以上对问题的描述,车模跟踪控制器设计如下。
经分析可以得到如下关系式:
-
无人车当前位置与航段 P ⃗ i \\vec P_i Pi 的侧向偏差: e ⃗ c t = [ ( x ⃗ − x ⃗ d ) ⋅ t ⃗ ] ⋅ t ⃗ − ( x ⃗ − x ⃗ d ) \\vec e_ct = \\left[ \\left( \\vec x - \\vec x_d \\right) \\cdot \\vec t \\right] \\cdot \\vec t - \\left( \\vec x - \\vec x_d \\right) ect=[(x−xd)⋅t]⋅t−(x−xd)
-
无人车当前位置与航段 P ⃗ i \\vec P_i Pi 的侧向偏差变化率, v ⃗ \\vec v v 为当前速度,则有: e ⃗ c t ′ = ( v ⃗ ⋅ t ⃗ ) ⋅ t ⃗ − v ^ \\vec e'_ct = \\left( \\vec v \\cdot \\vec t \\right) \\cdot \\vec t - \\hat v ect′=(v⋅t)⋅t−v^
-
无人车当前速度与航段 P ⃗ i
以上是关于让研究生给你讲讲GPS越野车模运动控制的主要内容,如果未能解决你的问题,请参考以下文章