STM32H7的SPI总线基础知识和HAL库API
Posted Simon223
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32H7的SPI总线基础知识和HAL库API相关的知识,希望对你有一定的参考价值。
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第72章 STM32H7的SPI总线基础知识和HAL库API
本章节为大家讲解SPI(Serial peripheral interface)总线的基础知识和对应的HAL库API。
目录
第72章 STM32H7的SPI总线基础知识和HAL库API
72.2.2 SPI接口的区别和时钟源(SPI1到SPI6)
72.3.2 SPI总线初始化结构体SPI_InitTypeDef
72.3.3 SPI总线句柄结构体SPI_HandleTypeDef
72.4 SPI总线源文件stm32h7xx_hal_spi.c
72.4.3 函数HAL_SPI_TransmitReceive
72.4.4 函数HAL_SPI_TransmitReceive_IT
72.4.5 函数HAL_SPI_TransmitReceive_DMA
72.1 初学者重要提示
- STM32H7的SPI支持4到32bit数据传输,而STM32F1和F4系列仅支持8bit或者16bit。
- STM32H7的主频400MHz时,SPI1, 2, 3最高通信时钟是100MHz,而SPI4, 5, 6是50MHz。
- STM32H7的MISO和MOSI引脚功能可以互换,使用比较灵活。
- SPI总线的片选引脚SS在单一的主从器件配置下是可选的,一般情况下可以不使用。
- 搜集了几篇质量比较高的SPI总线介绍帖:http://www.armbbs.cn/forum.php?mod=viewthread&tid=96788。
72.2 SPI总线基础知识
72.2.1 SPI总线的硬件框图
认识一个外设,最好的方式就是看它的框图,方便我们快速的了解SPI的基本功能,然后再看手册了解细节。
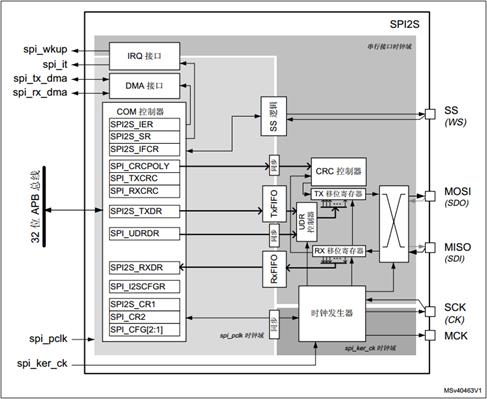
通过这个框图,我们可以得到如下信息:
- spi_wkup输出
低功耗唤醒信号。
- spi_it输出
spi的中断请求信号。
- spi_tx_dma
- spi_rx_dma
spi的DMA发送和接收请求信号。
- spi_pclk
为寄存器提供时钟。
- spi_ker_ck
为spi内核时钟。
- SCK(CK),Serial Clock
此引脚在主机模式下用于时钟输出,从机模式下用于时钟输入。
- MISO(SDI),Master In / Slave Out data
此引脚在从机模式下用于发送数据,主机模式下接收数据。
- MOSI(SDO), Master Out / Slave In data
此引脚在从机模式下用于数据接收,主机模式下发送数据。
- SS(WS), Slave select pin
根据SPI和SS设置,此引脚可用于:
a. 选择三个从器件进行通信。
b. 同步数据帧。
c. 检测多个主器件之间是否存在冲突。
通过这个框图还要认识到一点,SPI有三个时钟域,分别是寄存器所在的ABP总线时钟域,内核时钟发生器时钟域以及内核时钟发生器分频后的串行时钟域。
72.2.2 SPI接口的区别和时钟源(SPI1到SPI6)
这个知识点在初学的时候容易忽视,所以我们这里整理下。
- SPI1到SPI6的区别
- SPI1,SPI2和SPI3支持4到32bit数据传输,SPI4,SPI5和SPI6是4到16bit数据传输。
- SPI1,SPI2和SPI3的FIFO大小是16*8bit,而SPI4,SPI5和SPI6的FIFO大小是8*8bit。

- SPI1到SPI6的所在的总线(对应SPI框图的SPI_CLK时钟域)
SPI1,SPI4和SPI5在APB2总线,SPI2,SPI3在APB1总线,SPI6在APB4总线。注意,SPI的最高时钟不是由这些总线决定的。
- SPI1到SPI6的支持的最高时钟(对应SPI框图的SPI_KER_CK)
STM32H7主频在400MHz下,SPI1,SPI2和SPI3的最高时钟是200MHz,而SPI4,5,6是100MHz, 以SPI1为了,可以选择的时钟源如下:
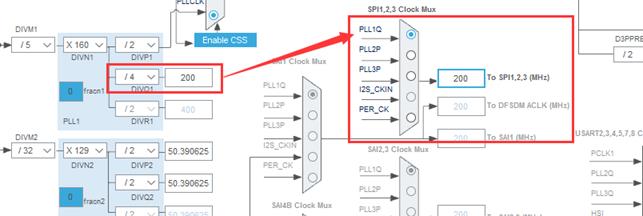
这里特别注意一点,SPI工作时最少选择二分频,也就是说SPI1,2,3实际通信时钟是100MHz,而SPI4,5,6是50MHz。
72.2.3 SPI总线全双工,单工和半双工通信
片选信号SS在单一的主从器件配置下是可选的,一般情况下可以不使用。但需要同步数据流,或者用于TI模式时需要此信号。
- 全双工通信
全双工就是主从器件之间同时互传数据,SPI总线的全双工模式接线方式如下:
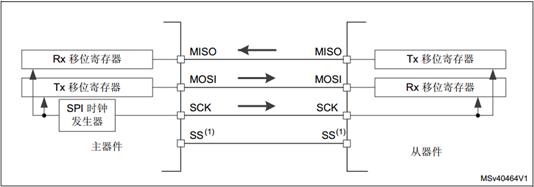
关于这个接线图要认识到以下几点:
-
- 注意接线方式,对于主器件来说MISO引脚就是输入端,从器件的MISO是输出端,即Master In / Slave Out data。MOSI也是同样道理。
- 每个时钟信号SCK的作用了,主器件的MISO引脚接收1个bit数据,MOSI引脚输出1个bit数据。
- 这种单一的主从接线模式下,SS引脚可以不使用。
- 半双工通信
半双工就是同一个时刻只能为一个方向传输数据,SPI总线的半工模式接线方式如下:
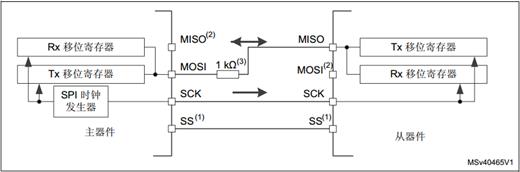
关于这个接线图要认识到以下几点:
-
- 更改通信方式时,要先禁止SPI。
- 主器件的MISO和从器件的MISO不使用,可以继续用作标准GPIO。
- 1KΩ的接线电阻很有必要,因为当主器件和从器件的通信方向不是同步变化时,容易出现其中一个输出低电平,另一个输出高电平,造成短路。
- 这种单一的主从接线模式下,SS引脚可以不使用。
- 单工模式
单工就是只有一种通信方向,即发送或者接收,SPI总线的全双工模式接线方式如下:

关于这个接线图要认识到以下几点:
-
- 未用到的MOSI或者MISO可以用作标准GPIO。
- 这种单一的主从接线模式下,SS引脚可以不使用。
72.2.4 SPI总线星型拓扑
SPI总线星型拓扑用到的地方比较多,V7开发板就是用的星型拓扑外接多种SPI器件:

关于这个接线图,有以下几点需要大家了解:
- 主器件的SS引脚不使用,使用通用GPIO控制。为每个器件配一个SS引脚,方便单独片选控制。
- 从器件的MISO引脚要配置为复用开漏输出(很多外部芯片在未片选时,数据引脚是呈现高阻态)。
72.2.5 SPI总线通信格式
SPI总线主要有四种通信格式,由CPOL时钟极性和CPHA时钟相位控制:

四种通信格式如下:
- 当CPOL = 1, CPHA = 1时
SCK引脚在空闲状态处于低电平,SCK引脚的第2个边沿捕获传输的第1个数据。
- 当CPOL = 0, CPHA = 1时
SCK引脚在空闲状态处于高电平,SCK引脚的第2个边沿捕获传输的第1个数据。
- 当CPOL = 1, CPHA = 0时
SCK引脚在空闲状态处于低电平,SCK引脚的第1个边沿捕获传输的第1个数据。
- 当CPOL = 1, CPHA = 0时
SCK引脚在空闲状态处于高电平,SCK引脚的第1个边沿捕获传输的第1个数据。
72.3 SPI总线的HAL库用法
72.3.1 SPI总线结构体SPI_TypeDef
SPI总线相关的寄存器是通过HAL库中的结构体SPI_TypeDef定义的,在stm32h743xx.h中可以找到这个类型定义:
typedef struct
__IO uint32_t CR1; /*!< SPI/I2S Control register 1, Address offset: 0x00 */
__IO uint32_t CR2; /*!< SPI Control register 2, Address offset: 0x04 */
__IO uint32_t CFG1; /*!< SPI Configuration register 1, Address offset: 0x08 */
__IO uint32_t CFG2; /*!< SPI Configuration register 2, Address offset: 0x0C */
__IO uint32_t IER; /*!< SPI/I2S Interrupt Enable register, Address offset: 0x10 */
__IO uint32_t SR; /*!< SPI/I2S Status register, Address offset: 0x14 */
__IO uint32_t IFCR; /*!< SPI/I2S Interrupt/Status flags clear register, Address offset: 0x18 */
uint32_t RESERVED0; /*!< Reserved, 0x1C */
__IO uint32_t TXDR; /*!< SPI/I2S Transmit data register, Address offset: 0x20 */
uint32_t RESERVED1[3]; /*!< Reserved, 0x24-0x2C */
__IO uint32_t RXDR; /*!< SPI/I2S Receive data register, Address offset: 0x30 */
uint32_t RESERVED2[3]; /*!< Reserved, 0x34-0x3C */
__IO uint32_t CRCPOLY; /*!< SPI CRC Polynomial register, Address offset: 0x40 */
__IO uint32_t TXCRC; /*!< SPI Transmitter CRC register, Address offset: 0x44 */
__IO uint32_t RXCRC; /*!< SPI Receiver CRC register, Address offset: 0x48 */
__IO uint32_t UDRDR; /*!< SPI Underrun data register, Address offset: 0x4C */
__IO uint32_t I2SCFGR; /*!< I2S Configuration register, Address offset: 0x50 */
SPI_TypeDef;这个结构体的成员名称和排列次序和CPU的寄存器是一 一对应的。
__IO表示volatile, 这是标准C语言中的一个修饰字,表示这个变量是非易失性的,编译器不要将其优化掉。core_m7.h 文件定义了这个宏:
#define __O volatile /*!< Defines 'write only' permissions */
#define __IO volatile /*!< Defines 'read / write' permissions */
下面我们看下SPI的定义,在stm32h743xx.h文件。
#define PERIPH_BASE (0x40000000UL)
#define D2_APB1PERIPH_BASE PERIPH_BASE
#define D2_APB2PERIPH_BASE (PERIPH_BASE + 0x00010000UL)
#define D3_APB1PERIPH_BASE (PERIPH_BASE + 0x18000000UL)
#define SPI2_BASE (D2_APB1PERIPH_BASE + 0x3800UL)
#define SPI3_BASE (D2_APB1PERIPH_BASE + 0x3C00UL)
#define SPI1_BASE (D2_APB2PERIPH_BASE + 0x3000UL)
#define SPI4_BASE (D2_APB2PERIPH_BASE + 0x3400UL)
#define SPI5_BASE (D2_APB2PERIPH_BASE + 0x5000UL)
#define SPI6_BASE (D3_APB1PERIPH_BASE + 0x1400UL)
#define SPI1 ((SPI_TypeDef *) SPI1_BASE)
#define SPI2 ((SPI_TypeDef *) SPI2_BASE)
#define SPI3 ((SPI_TypeDef *) SPI3_BASE)
#define SPI4 ((SPI_TypeDef *) SPI4_BASE)
#define SPI5 ((SPI_TypeDef *) SPI5_BASE)
#define SPI6 ((SPI_TypeDef *) SPI6_BASE) <----- 展开这个宏,(FLASH_TypeDef *)0x58001400
我们访问SPI的CR1寄存器可以采用这种形式:SPI->CR1 = 0。
72.3.2 SPI总线初始化结构体SPI_InitTypeDef
下面是SPI总线的初始化结构体,用到的地方比较多:
typedef struct
uint32_t Mode;
uint32_t Direction;
uint32_t DataSize;
uint32_t CLKPolarity;
uint32_t CLKPhase;
uint32_t NSS;
uint32_t BaudRatePrescaler;
uint32_t FirstBit;
uint32_t TIMode;
uint32_t CRCCalculation;
uint32_t CRCPolynomial;
uint32_t CRCLength;
uint32_t NSSPMode;
uint32_t NSSPolarity;
uint32_t TxCRCInitializationPattern;
uint32_t RxCRCInitializationPattern;
uint32_t MasterSSIdleness;
uint32_t MasterInterDataIdleness;
uint32_t MasterReceiverAutoSusp;
uint32_t MasterKeepiostate;
uint32_t IOSwap;
SPI_InitTypeDef;
下面将结构体成员逐一做个说明:
- Mode
用于设置工作在主机模式还是从机模式。
#define SPI_MODE_SLAVE (0x00000000UL)
#define SPI_MODE_MASTER SPI_CFG2_MASTER
- Direction
用于设置SPI工作在全双工,单工,还是半双工模式。
#define SPI_DIRECTION_2LINES (0x00000000UL) /* 全双工 */
#define SPI_DIRECTION_2LINES_TXONLY SPI_CFG2_COMM_0 /* 单工,仅发送 */
#define SPI_DIRECTION_2LINES_RXONLY SPI_CFG2_COMM_1 /* 单工,仅接收 */
#define SPI_DIRECTION_1LINE SPI_CFG2_COMM /* 半双工 */
- DataSize
用于设置SPI总线数据收发的位宽,支持4-32bit。
#define SPI_DATASIZE_4BIT (0x00000003UL)
#define SPI_DATASIZE_5BIT (0x00000004UL)
#define SPI_DATASIZE_6BIT (0x00000005UL)
#define SPI_DATASIZE_7BIT (0x00000006UL)
#define SPI_DATASIZE_8BIT (0x00000007UL)
#define SPI_DATASIZE_9BIT (0x00000008UL)
#define SPI_DATASIZE_10BIT (0x00000009UL)
#define SPI_DATASIZE_11BIT (0x0000000AUL)
#define SPI_DATASIZE_12BIT (0x0000000BUL)
#define SPI_DATASIZE_13BIT (0x0000000CUL)
#define SPI_DATASIZE_14BIT (0x0000000DUL)
#define SPI_DATASIZE_15BIT (0x0000000EUL)
#define SPI_DATASIZE_16BIT (0x0000000FUL)
#define SPI_DATASIZE_17BIT (0x00000010UL)
#define SPI_DATASIZE_18BIT (0x00000011UL)
#define SPI_DATASIZE_19BIT (0x00000012UL)
#define SPI_DATASIZE_20BIT (0x00000013UL)
#define SPI_DATASIZE_21BIT (0x00000014UL)
#define SPI_DATASIZE_22BIT (0x00000015UL)
#define SPI_DATASIZE_23BIT (0x00000016UL)
#define SPI_DATASIZE_24BIT (0x00000017UL)
#define SPI_DATASIZE_25BIT (0x00000018UL)
#define SPI_DATASIZE_26BIT (0x00000019UL)
#define SPI_DATASIZE_27BIT (0x0000001AUL)
#define SPI_DATASIZE_28BIT (0x0000001BUL)
#define SPI_DATASIZE_29BIT (0x0000001CUL)
#define SPI_DATASIZE_30BIT (0x0000001DUL)
#define SPI_DATASIZE_31BIT (0x0000001EUL)
#define SPI_DATASIZE_32BIT (0x0000001FUL)
- CLKPolarity
用于设置空闲状态时,CLK是高电平还是低电平。
#define SPI_POLARITY_LOW (0x00000000UL)
#define SPI_POLARITY_HIGH SPI_CFG2_CPOL
- NSS
用于设置NSS信号由硬件NSS引脚管理或者软件SSI位管理。
#define SPI_NSS_SOFT SPI_CFG2_SSM
#define SPI_NSS_HARD_INPUT (0x00000000UL)
#define SPI_NSS_HARD_OUTPUT SPI_CFG2_SSOE
- BaudRatePrescaler
用于设置SPI时钟分频,仅SPI工作在主控模式下起作用,对SPI从机模式不起作用。
#define SPI_BAUDRATEPRESCALER_2 (0x00000000UL)
#define SPI_BAUDRATEPRESCALER_4 (0x10000000UL)
#define SPI_BAUDRATEPRESCALER_8 (0x20000000UL)
#define SPI_BAUDRATEPRESCALER_16 (0x30000000UL)
#define SPI_BAUDRATEPRESCALER_32 (0x40000000UL)
#define SPI_BAUDRATEPRESCALER_64 (0x50000000UL)
#define SPI_BAUDRATEPRESCALER_128 (0x60000000UL)
#define SPI_BAUDRATEPRESCALER_256 (0x70000000UL)
- FirstBit
用于设置数据传输从最高bit开始还是从最低bit开始。
#define SPI_FIRSTBIT_MSB (0x00000000UL)
#define SPI_FIRSTBIT_LSB SPI_CFG2_LSBFRST
- TIMode
用于设置是否使能SPI总线的TI模式。
#define SPI_TIMODE_DISABLE (0x00000000UL)
#define SPI_TIMODE_ENABLE SPI_CFG2_SP_0
- CRCCalculation
用于设置是否使能CRC计算。
#define SPI_CRCCALCULATION_DISABLE (0x00000000UL)
#define SPI_CRCCALCULATION_ENABLE SPI_CFG1_CRCEN
- CRCPolynomial
用于设置CRC计算使用的多项式,必须是奇数,范围0到65535。
- CRCLength
用于设置CRC计算时的CRC长度。大小要与同属此结构体的DataSize一致。或是DataSize的整数倍。
#define SPI_CRC_LENGTH_DATASIZE (0x00000000UL)
#define SPI_CRC_LENGTH_4BIT (0x00030000UL)
#define SPI_CRC_LENGTH_5BIT (0x00040000UL)
#define SPI_CRC_LENGTH_6BIT (0x00050000UL)
#define SPI_CRC_LENGTH_7BIT (0x00060000UL)
#define SPI_CRC_LENGTH_8BIT (0x00070000UL)
#define SPI_CRC_LENGTH_9BIT (0x00080000UL)
#define SPI_CRC_LENGTH_10BIT (0x00090000UL)
#define SPI_CRC_LENGTH_11BIT (0x000A0000UL)
#define SPI_CRC_LENGTH_12BIT (0x000B0000UL)
#define SPI_CRC_LENGTH_13BIT (0x000C0000UL)
#define SPI_CRC_LENGTH_14BIT (0x000D0000UL)
#define SPI_CRC_LENGTH_15BIT (0x000E0000UL)
#define SPI_CRC_LENGTH_16BIT (0x000F0000UL)
#define SPI_CRC_LENGTH_17BIT (0x00100000UL)
#define SPI_CRC_LENGTH_18BIT (0x00110000UL)
#define SPI_CRC_LENGTH_19BIT (0x00120000UL)
#define SPI_CRC_LENGTH_20BIT (0x00130000UL)
#define SPI_CRC_LENGTH_21BIT (0x00140000UL)
#define SPI_CRC_LENGTH_22BIT (0x00150000UL)
#define SPI_CRC_LENGTH_23BIT (0x00160000UL)
#define SPI_CRC_LENGTH_24BIT (0x00170000UL)
#define SPI_CRC_LENGTH_25BIT (0x00180000UL)
#define SPI_CRC_LENGTH_26BIT (0x00190000UL)
#define SPI_CRC_LENGTH_27BIT (0x001A0000UL)
#define SPI_CRC_LENGTH_28BIT (0x001B0000UL)
#define SPI_CRC_LENGTH_29BIT (0x001C0000UL)
#define SPI_CRC_LENGTH_30BIT (0x001D0000UL)
#define SPI_CRC_LENGTH_31BIT (0x001E0000UL)
#define SPI_CRC_LENGTH_32BIT (0x001F0000UL)
- NSSPMode
用于设置是否使能NSSP信号,可以通过SPIx_CR2寄存器的SSOM位使能。注意,只有配置为摩托罗拉SPI主控模式时设置此成员才有用。
#define SPI_NSS_PULSE_DISABLE (0x00000000UL)
#define SPI_NSS_PULSE_ENABLE SPI_CFG2_SSOM
- NSSPolarity
用于设置NSS引脚上的高电平或者低电平作为激活电平。
#define SPI_NSS_POLARITY_LOW (0x00000000UL)
#define SPI_NSS_POLARITY_HIGH SPI_CFG2_SSIOP
- FifoThreshold
用于设置SPI的FIFO阀值。
#define SPI_FIFO_THRESHOLD_01DATA (0x00000000UL)
#define SPI_FIFO_THRESHOLD_02DATA (0x00000020UL)
#define SPI_FIFO_THRESHOLD_03DATA (0x00000040UL)
#define SPI_FIFO_THRESHOLD_04DATA (0x00000060UL)
#define SPI_FIFO_THRESHOLD_05DATA (0x00000080UL)
#define SPI_FIFO_THRESHOLD_06DATA (0x000000A0UL)
#define SPI_FIFO_THRESHOLD_07DATA (0x000000C0UL)
#define SPI_FIFO_THRESHOLD_08DATA (0x000000E0UL)
#define SPI_FIFO_THRESHOLD_09DATA (0x00000100UL)
#define SPI_FIFO_THRESHOLD_10DATA (0x00000120UL)
#define SPI_FIFO_THRESHOLD_11DATA (0x00000140UL)
#define SPI_FIFO_THRESHOLD_12DATA (0x00000160UL)
#define SPI_FIFO_THRESHOLD_13DATA (0x00000180UL)
#define SPI_FIFO_THRESHOLD_14DATA (0x000001A0UL)
#define SPI_FIFO_THRESHOLD_15DATA (0x000001C0UL)
#define SPI_FIFO_THRESHOLD_16DATA (0x000001E0UL)
- TxCRCInitializationPattern
发送CRC初始化模式。
#define SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN (0x00000000UL)
#define SPI_CRC_INITIALIZATION_ALL_ONE_PATTERN (0x00000001UL)
- RxCRCInitializationPattern
接收CRC初始化模式
#define SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN (0x00000000UL)
#define SPI_CRC_INITIALIZATION_ALL_ONE_PATTERN (0x00000001UL)
- MasterSSIdleness
在主模式下插入到SS有效边沿和第一个数据开始之间的额外延迟,单位SPI时钟周期个数。
#define SPI_MASTER_SS_IDLENESS_00CYCLE (0x00000000UL)
#define SPI_MASTER_SS_IDLENESS_01CYCLE (0x00000001UL)
#define SPI_MASTER_SS_IDLENESS_02CYCLE (0x00000002UL)
#define SPI_MASTER_SS_IDLENESS_03CYCLE (0x00000003UL)
#define SPI_MASTER_SS_IDLENESS_04CYCLE (0x00000004UL)
#define SPI_MASTER_SS_IDLENESS_05CYCLE (0x00000005UL)
#define SPI_MASTER_SS_IDLENESS_06CYCLE (0x00000006UL)
#define SPI_MASTER_SS_IDLENESS_07CYCLE (0x00000007UL)
#define SPI_MASTER_SS_IDLENESS_08CYCLE (0x00000008UL)
#define SPI_MASTER_SS_IDLENESS_09CYCLE (0x00000009UL)
#define SPI_MASTER_SS_IDLENESS_10CYCLE (0x0000000AUL)
#define SPI_MASTER_SS_IDLENESS_11CYCLE (0x0000000BUL)
#define SPI_MASTER_SS_IDLENESS_12CYCLE (0x0000000CUL)
#define SPI_MASTER_SS_IDLENESS_13CYCLE (0x0000000DUL)
#define SPI_MASTER_SS_IDLENESS_14CYCLE (0x0000000EUL)
#define SPI_MASTER_SS_IDLENESS_15CYCLE (0x0000000FUL)
- MasterInterDataIdleness
主模式下在两个连续数据帧之间插入的最小时间延迟,单位SPI时钟周期个数。
#define SPI_MASTER_RX_AUTOSUSP_DISABLE (0x00000000UL)
#define SPI_MASTER_RX_AUTOSUSP_ENABLE SPI_CR1_MASRX
- MasterReceiverAutoSusp
用于控制主器件接收器模式下的连续 SPI 传输以及自动管理,以避免出现上溢情况。
#define SPI_MASTER_RX_AUTOSUSP_DISABLE (0x00000000UL)
#define SPI_MASTER_RX_AUTOSUSP_ENABLE SPI_CR1_MASRX
- MasterKeepIOState
禁止SPI后,SPI相关引脚保持当前状态,以防止出现毛刺。在从模式下,该位不应该使用。
#define SPI_MASTER_KEEP_IO_STATE_DISABLE (0x00000000UL)
#define SPI_MASTER_KEEP_IO_STATE_ENABLE SPI_CFG2_AFCNTR
- IOSwap
用于交换MISO和MOSI引脚。
#define SPI_IO_SWAP_DISABLE (0x00000000UL)
#define SPI_IO_SWAP_ENABLE SPI_CFG2_IOSWP
72.3.3 SPI总线句柄结构体SPI_HandleTypeDef
下面是SPI总线的初始化结构体,用到的地方比较多:
typedef struct __SPI_HandleTypeDef
SPI_TypeDef *Instance;
SPI_InitTypeDef Init;
uint8_t *pTxBuffPtr;
uint16_t TxXferSize;
__IO uint16_t TxXferCount;
uint8_t *pRxBuffPtr;
uint16_t RxXferSize;
__IO uint16_t RxXferCount;
uint32_t CRCSize;
void (*RxISR)(struct __SPI_HandleTypeDef *hspi);
void (*TxISR)(struct __SPI_HandleTypeDef *hspi);
DMA_HandleTypeDef *hdmatx;
DMA_HandleTypeDef *hdmarx;
HAL_LockTypeDef Lock;
__IO HAL_SPI_StateTypeDef State;
__IO uint32_t ErrorCode;
#if defined(USE_SPI_RELOAD_TRANSFER)
SPI_ReloadTypeDef Reload;
#endif
#if (USE_HAL_SPI_REGISTER_CALLBACKS == 1UL)
void (* TxCpltCallback)(struct __SPI_HandleTypeDef *hspi);
void (* RxCpltCallback)(struct __SPI_HandleTypeDef *hspi);
void (* TxRxCpltCallback)(struct __SPI_HandleTypeDef *hspi);
void (* TxHalfCpltCallback)(struct __SPI_HandleTypeDef *hspi);
void (* RxHalfCpltCallback)(struct __SPI_HandleTypeDef *hspi);
void (* TxRxHalfCpltCallback)(struct __SPI_HandleTypeDef *hspi);
void (* ErrorCallback)(struct __SPI_HandleTypeDef *hspi);
void (* AbortCpltCallback)(struct __SPI_HandleTypeDef *hspi);
void (* MspInitCallback)(struct __SPI_HandleTypeDef *hspi);
void (* MspDeInitCallback)(struct __SPI_HandleTypeDef *hspi);
#endif
SPI_HandleTypeDef;
注意事项:
条件编译USE_HAL_SPI_REGISTER_CALLBACKS用来设置使用自定义回调还是使用默认回调,此定义一般放在stm32h7xx_hal_conf.h文件里面设置:
#define USE_HAL_SPI_REGISTER_CALLBACKS 1
通过函数HAL_SPI_RegisterCallback注册回调,取消注册使用函数HAL_SPI_UnRegisterCallback。
这里重点介绍下面几个参数,其它参数主要是HAL库内部使用和自定义回调函数。
- SPI_TypeDef *Instance
这个参数是寄存器的例化,方便操作寄存器,比如使能SPI1。
SET_BIT(SPI1 ->CR1, SPI_CR1_SPE)。
- SPI_InitTypeDef Init
这个参数是用户接触最多的,在本章节3.2小节已经进行了详细说明。
- DMA_HandleTypeDef *hdmatx
- DMA_HandleTypeDef *hdmarx
用于SPI句柄关联DMA句柄,方便操作调用。
72.4 SPI总线源文件stm32h7xx_hal_spi.c
此文件涉及到的函数较多,这里把几个常用的函数做个说明:
- HAL_SPI_Init
- HAL_SPI_DeInit
- HAL_SPI_TransmitReceive
- HAL_SPI_TransmitReceive_IT
- HAL_SPI_TransmitReceive_DMA
72.4.1 函数HAL_SPI_Init
函数原型:
HAL_StatusTypeDef HAL_SPI_Init(SPI_HandleTypeDef *hspi)
uint32_t crc_length = 0UL;
uint32_t packet_length;
/* 省略未写 */
/* 如果数据位宽大于16bit,必须是SPI1,SPI2或者SPI3,而SPI4,SPI5和SPI6不支持大于16bit */
if ((!IS_SPI_HIGHEND_INSTANCE(hspi->Instance)) && (hspi->Init.DataSize > SPI_DATASIZE_16BIT))
return HAL_ERROR;
/* SPI1,SPI2和SPI3的FIFO大小是16*8bit,而SPI4,SPI5和SPI6的FIFO大小是8*8bit
这里是查看设置的缓冲大小是否超出了FIFO支持的大小。
*/
packet_length = SPI_GetPacketSize(hspi);
if (((!IS_SPI_HIGHEND_INSTANCE(hspi->Instance)) && (packet_length > SPI_LOWEND_FIFO_SIZE)) ||
((IS_SPI_HIGHEND_INSTANCE(hspi->Instance)) && (packet_length > SPI_HIGHEND_FIFO_SIZE)))
return HAL_ERROR;
#if (USE_SPI_CRC != 0UL)
/* 省略未写 */
#endif
if (hspi->State == HAL_SPI_STATE_RESET)
/* 解锁 */
hspi->Lock = HAL_UNLOCKED;
/* 使用自定义回调 */
#if (USE_HAL_SPI_REGISTER_CALLBACKS == 1UL)
/* 设置默认回调函数 */
hspi->TxCpltCallback = HAL_SPI_TxCpltCallback; /* Legacy weak TxCpltCallback */
hspi->RxCpltCallback = HAL_SPI_RxCpltCallback; /* Legacy weak RxCpltCallback */
hspi->TxRxCpltCallback = HAL_SPI_TxRxCpltCallback; /* Legacy weak TxRxCpltCallback */
hspi->TxHalfCpltCallback = HAL_SPI_TxHalfCpltCallback; /* Legacy weak TxHalfCpltCallback */
hspi->RxHalfCpltCallback = HAL_SPI_RxHalfCpltCallback; /* Legacy weak RxHalfCpltCallback */
hspi->TxRxHalfCpltCallback = HAL_SPI_TxRxHalfCpltCallback; /* Legacy weak TxRxHalfCpltCallback */
hspi->ErrorCallback = HAL_SPI_ErrorCallback; /* Legacy weak ErrorCallback */
hspi->AbortCpltCallback = HAL_SPI_AbortCpltCallback; /* Legacy weak AbortCpltCallback */
if (hspi->MspInitCallback == NULL)
hspi->MspInitCallback = HAL_SPI_MspInit;
/* 初始化地址硬件: GPIO, CLOCK, NVIC... */
hspi->MspInitCallback(hspi);
#else
/* 初始化底层硬件: GPIO, CLOCK, NVIC... */
HAL_SPI_MspInit(hspi);
#endif
hspi->State = HAL_SPI_STATE_BUSY;
/* 禁止SPI外设 */
__HAL_SPI_DISABLE(hspi);
/*----------------------- SPIx CR1 & CR2 配置---------------------*/
if ((hspi->Init.NSS == SPI_NSS_SOFT) && (hspi->Init.Mode == SPI_MODE_MASTER) && (hspi->Init.NSSPolarity ==
SPI_NSS_POLARITY_LOW))
SET_BIT(hspi->Instance->CR1, SPI_CR1_SSI);
/* SPIx CFG1配置 */
WRITE_REG(hspi->Instance->CFG1, (hspi->Init.BaudRatePrescaler | hspi->Init.CRCCalculation | crc_length |
hspi->Init.FifoThreshold | hspi->Init.DataSize));
/* SPIx CFG2配置 */
WRITE_REG(hspi->Instance->CFG2, (hspi->Init.NSSPMode | hspi->Init.TIMode | hspi->Init.NSSPolarity |
hspi->Init.NSS | hspi->Init.CLKPolarity | hspi->Init.CLKPhase |
hspi->Init.FirstBit | hspi->Init.Mode | hspi->Init.MasterInterDataIdleness |
hspi->Init.Direction | hspi->Init.MasterSSIdleness | hspi->Init.IOSwap));
#if (USE_SPI_CRC != 0UL)
/*---------------------------- SPIx CRC配置 ------------------*/
/* 配置SPI CRC */
if (hspi->Init.CRCCalculation == SPI_CRCCALCULATION_ENABLE)
/* 初始化TX CRC初始值 */
if (hspi->Init.TxCRCInitializationPattern == SPI_CRC_INITIALIZATION_ALL_ONE_PATTERN)
SET_BIT(hspi->Instance->CR1, SPI_CR1_TCRCINI);
else
CLEAR_BIT(hspi->Instance->CR1, SPI_CR1_TCRCINI);
/* 初始化RXCRC初始值 */
if (hspi->Init.RxCRCInitializationPattern == SPI_CRC_INITIALIZATION_ALL_ONE_PATTERN)
SET_BIT(hspi->Instance->CR1, SPI_CR1_RCRCINI);
else
CLEAR_BIT(hspi->Instance->CR1, SPI_CR1_RCRCINI);
/* 使能 33/17 bit CRC计算 */
if (((!IS_SPI_HIGHEND_INSTANCE(hspi->Instance)) && (crc_length == SPI_CRC_LENGTH_16BIT)) ||
((IS_SPI_HIGHEND_INSTANCE(hspi->Instance)) && (crc_length == SPI_CRC_LENGTH_32BIT)))
SET_BIT(hspi->Instance->CR1, SPI_CR1_CRC33_17);
else
CLEAR_BIT(hspi->Instance->CR1, SPI_CR1_CRC33_17);
/* 写CRC多项式到SPI寄存器 */
WRITE_REG(hspi->Instance->CRCPOLY, hspi->Init.CRCPolynomial);
#endif
/* SPI从模式,下溢配置 */
if (hspi->Init.Mode == SPI_MODE_SLAVE)
/* 设置默认下溢配置 */
#if (USE_SPI_CRC != 0UL)
if (hspi->Init.CRCCalculation == SPI_CRCCALCULATION_DISABLE)
#endif
MODIFY_REG(hspi->Instance->CFG1, SPI_CFG1_UDRDET, SPI_CFG1_UDRDET_0);
MODIFY_REG(hspi->Instance->CFG1, SPI_CFG1_UDRCFG, SPI_CFG1_UDRCFG_1);
#if defined(SPI_I2SCFGR_I2SMOD)
CLEAR_BIT(hspi->Instance->I2SCFGR, SPI_I2SCFGR_I2SMOD);
#endif
/* 确保AFCNTR bit由SPI主机模式管理 */
if ((hspi->Init.Mode & SPI_MODE_MASTER) == SPI_MODE_MASTER)
/* Alternate function GPIOs control */
MODIFY_REG(hspi->Instance->CFG2, SPI_CFG2_AFCNTR, (hspi->Init.MasterKeepIOState));
hspi->ErrorCode = HAL_SPI_ERROR_NONE;
hspi->State = HAL_SPI_STATE_READY;
return HAL_OK;
函数描述:
此函数用于初始化SPI。
函数参数:
- 第1个参数是SPI_HandleTypeDef类型结构体指针变量,用于配置要初始化的参数。
- 返回值,返回HAL_TIMEOUT表示超时,HAL_ERROR表示参数错误,HAL_OK表示发送成功,HAL_BUSY表示忙,正在使用中。
注意事项:
- 函数HAL_SPI_MspInit用于初始化SPI的底层时钟、引脚等功能。需要用户自己在此函数里面实现具体的功能。由于这个函数是弱定义的,允许用户在工程其它源文件里面重新实现此函数。当然,不限制一定要在此函数里面实现,也可以像早期的标准库那样,用户自己初始化即可,更灵活些。
- 如果形参hspi的结构体成员State没有做初始状态,这个地方就是个坑。特别是用户搞了一个局部变量SPI_HandleTypeDef SpiHandle。
对于局部变量来说,这个参数就是一个随机值,如果是全局变量还好,一般MDK和IAR都会将全部变量初始化为0,而恰好这个 HAL_SPI_STATE_RESET = 0x00U。
解决办法有三
方法1:用户自己初始化SPI和涉及到的GPIO等。
方法2:定义SPI_HandleTypeDef SpiHandle为全局变量。
方法3:下面的方法
if(HAL_SPI_DeInit(&SpiHandle) != HAL_OK)
Error_Handler();
if(HAL_SPI_Init(&SpiHandle) != HAL_OK)
Error_Handler();
使用举例:
SPI_HandleTypeDef hspi = 0;
/* 设置SPI参数 */
hspi.Instance = SPIx; /* 例化SPI */
hspi.Init.BaudRatePrescaler = _BaudRatePrescaler; /* 设置波特率 */
hspi.Init.Direction = SPI_DIRECTION_2LINES; /* 全双工 */
hspi.Init.CLKPhase = _CLKPhase; /* 配置时钟相位 */
hspi.Init.CLKPolarity = _CLKPolarity; /* 配置时钟极性 */
hspi.Init.DataSize = SPI_DATASIZE_8BIT; /* 设置数据宽度 */
hspi.Init.FirstBit = SPI_FIRSTBIT_MSB; /* 数据传输先传高位 */
hspi.Init.TIMode = SPI_TIMODE_DISABLE; /* 禁止TI模式 */
hspi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; /* 禁止CRC */
hspi.Init.CRCPolynomial = 7; /* 禁止CRC后,此位无效 */
hspi.Init.CRCLength = SPI_CRC_LENGTH_8BIT; /* 禁止CRC后,此位无效 */
hspi.Init.NSS = SPI_NSS_SOFT; /* 使用软件方式管理片选引脚 */
hspi.Init.FifoThreshold = SPI_FIFO_THRESHOLD_01DATA; /* 设置FIFO大小是一个数据项 */
hspi.Init.NSSPMode = SPI_NSS_PULSE_DISABLE; /* 禁止脉冲输出 */
hspi.Init.MasterKeepIOState = SPI_MASTER_KEEP_IO_STATE_ENABLE; /* 禁止SPI后,SPI相关引脚保持当前状态 */
hspi.Init.Mode = SPI_MODE_MASTER; /* SPI工作在主控模式 */
if (HAL_SPI_Init(&hspi) != HAL_OK)
Error_Handler(__FILE__, __LINE__);
72.4.2 函数HAL_SPI_DeInit
函数原型:
HAL_StatusTypeDef HAL_SPI_DeInit(SPI_HandleTypeDef *hspi)
/* 检测SPI句柄是否有效 */
if (hspi == NULL)
return HAL_ERROR;
/* 检查SPI例化参数 */
assert_param(IS_SPI_ALL_INSTANCE(hspi->Instance));
hspi->State = HAL_SPI_STATE_BUSY;
/* 禁止SPI外设时钟 */
__HAL_SPI_DISABLE(hspi);
#if (USE_HAL_SPI_REGISTER_CALLBACKS == 1UL)
if (hspi->MspDeInitCallback == NULL)
hspi->MspDeInitCallback = HAL_SPI_MspDeInit;
/* 复位底层硬件: GPIO, CLOCK, NVIC... */
hspi->MspDeInitCallback(hspi);
#else
/* 复位底层硬件: GPIO, CLOCK, NVIC... */
HAL_SPI_MspDeInit(hspi);
#endif
/* 设置无错误,复位状态标记 */
hspi->ErrorCode = HAL_SPI_ERROR_NONE;
hspi->State = HAL_SPI_STATE_RESET;
/* 解锁SPI */
__HAL_UNLOCK(hspi);
return HAL_OK;
函数描述:
用于复位SPI总线初始化。
函数参数:
- 第1个参数是SPI_HandleTypeDef类型结构体指针变量。
- 返回值,返回HAL_TIMEOUT表示超时,HAL_ERROR表示参数错误,HAL_OK表示发送成功,HAL_BUSY表示忙,正在使用中
72.4.3 函数HAL_SPI_TransmitReceive
函数原型:
HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size, uint32_t Timeout)
/* 省略未写 */
/* 大于16bit的数据收发 */
if (hspi->Init.DataSize > SPI_DATASIZE_16BIT)
/* 省略未写 */
/* 大于8bit,小于16bi的数据收发 */
else if (hspi->Init.DataSize > SPI_DATASIZE_8BIT)
/* 省略未写 */
/* 小于等于8bit的数据收发 */
else
/* 省略未写 */
函数描述:
此函数主要用于SPI数据收发,全双工查询方式。
函数参数:
- 第1个参数是SPI_HandleTypeDef类型结构体指针变量。
- 第2个参数是发送数据缓冲地址。
- 第3个参数是接收数据缓冲地址。
- 第4个参数是传输的数据大小,单位字节个数。
- 第5个参数是传输过程的溢出时间,单位ms。
- 返回值,返回HAL_TIMEOUT表示超时,HAL_ERROR表示参数错误,HAL_OK表示发送成功,HAL_BUSY表示忙,正在使用中。
使用举例:
SPI_HandleTypeDef hspi = 0;
if(HAL_SPI_TransmitReceive(&hspi, (uint8_t*)g_spiTxBuf, (uint8_t *)g_spiRxBuf, g_spiLen, 1000000) != HAL_OK)
Error_Handler(__FILE__, __LINE__);
72.4.4 函数HAL_SPI_TransmitReceive_IT
函数原型:
HAL_StatusTypeDef HAL_SPI_TransmitReceive_IT(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size)
/* 省略未写 */
/* 设置传输参数 */
hspi->ErrorCode = HAL_SPI_ERROR_NONE;
hspi->pTxBuffPtr = (uint8_t *)pTxData;
hspi->TxXferSize = Size;
hspi->TxXferCount = Size;
hspi->pRxBuffPtr = (uint8_t *)pRxData;
hspi->RxXferSize = Size;
hspi->RxXferCount = Size;
/* 设置中断处理 */
if (hspi->Init.DataSize > SPI_DATASIZE_16BIT)
hspi->TxISR = SPI_TxISR_32BIT;
hspi->RxISR = SPI_RxISR_32BIT;
else if (hspi->Init.DataSize > SPI_DATASIZE_8BIT)
hspi->RxISR = SPI_RxISR_16BIT;
hspi->TxISR = SPI_TxISR_16BIT;
else
hspi->RxISR = SPI_RxISR_8BIT;
hspi->TxISR = SPI_TxISR_8BIT;
/* 设置当前传输数据大小 */
MODIFY_REG(hspi->Instance->CR2, SPI_CR2_TSIZE, Size);
/* 使能SPI外设 */
__HAL_SPI_ENABLE(hspi);
/* 使能各种中断标志 */
__HAL_SPI_ENABLE_IT(hspi, (SPI_IT_EOT | SPI_IT_RXP | SPI_IT_TXP | SPI_IT_DXP | SPI_IT_UDR | SPI_IT_OVR |
SPI_IT_FRE | SPI_IT_MODF | SPI_IT_TSERF));
if (hspi->Init.Mode == SPI_MODE_MASTER)
/* 启动传输 */
SET_BIT(hspi->Instance->CR1, SPI_CR1_CSTART);
/* 解锁 */
__HAL_UNLOCK(hspi);
return errorcode;
函数描述:
此函数主要用于SPI数据收发,全双工中断方式。
函数参数:
- 第1个参数是SPI_HandleTypeDef类型结构体指针变量。
- 第2个参数是发送数据缓冲地址。
- 第3个参数是接收数据缓冲地址。
- 第4个参数是传输的数据大小,单位字节个数。
- 返回值,返回HAL_TIMEOUT表示超时,HAL_ERROR表示参数错误,HAL_OK表示发送成功,HAL_BUSY表示忙,正在使用中。
使用举例:
SPI_HandleTypeDef hspi = 0;
if(HAL_SPI_TransmitReceive_IT(&hspi, (uint8_t*)g_spiTxBuf, (uint8_t *)g_spiRxBuf, g_spiLen) != HAL_OK)
Error_Handler(__FILE__, __LINE__);
72.4.5 函数HAL_SPI_TransmitReceive_DMA
函数原型:
HAL_StatusTypeDef HAL_SPI_TransmitReceive_DMA(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData,
uint16_t Size)
/* 省略未写 */
/* 注意DMA的位宽和对齐设置 */
if (((hspi->Init.DataSize > SPI_DATASIZE_16BIT) && (hspi->hdmarx->Init.MemDataAlignment !=
DMA_MDATAALIGN_WORD)) ||
((hspi->Init.DataSize > SPI_DATASIZE_8BIT) && ((hspi->hdmarx->Init.MemDataAlignment != DMA_MDATAALIGN_HALFWORD) && (hspi->hdmarx->Init.MemDataAlignment != DMA_MDATAALIGN_WORD))))
/* 调整DMA对齐和数据大小 */
if (hspi->Init.DataSize <= SPI_DATASIZE_8BIT)
/* 省略未写 */
else if (hspi->Init.DataSize <= SPI_DATASIZE_16BIT)
/* 省略未写 */
else
/* 省略未写 */
/* DMA接收配置 */
if (HAL_OK != HAL_DMA_Start_IT(hspi->hdmarx, (uint32_t)&hspi->Instance->RXDR, (uint32_t)hspi->pRxBuffPtr,
hspi->RxXferCount))
/* DMA发送配置 */
if (HAL_OK != HAL_DMA_Start_IT(hspi->hdmatx, (uint32_t)hspi->pTxBuffPtr, (uint32_t)&hspi->Instance->TXDR,
hspi->TxXferCount))
/* 省略未写 */
函数描述:
此函数主要用于SPI数据收发,全双工DMA方式。
函数参数:
- 第1个参数是SPI_HandleTypeDef类型结构体指针变量。
- 第2个参数是发送数据缓冲地址。
- 第3个参数是接收数据缓冲地址。
- 第4个参数是传输的数据大小,单位字节个数。
- 返回值,返回HAL_TIMEOUT表示超时,HAL_ERROR表示参数错误,HAL_OK表示发送成功,HAL_BUSY表示忙,正在使用中。
使用举例:
SPI_HandleTypeDef hspi = 0;
if(HAL_SPI_TransmitReceive_DMA(&hspi, (uint8_t*)g_spiTxBuf, (uint8_t *)g_spiRxBuf, g_spiLen) != HAL_OK)
Error_Handler(__FILE__, __LINE__);
72.5 总结
本章节就为大家讲解这么多,要熟练掌握SPI总线的查询,中断和DMA方式的实现,因为基于SPI接口的外设芯片很多,熟练后,可以方便的驱动各种SPI接口芯片,以便选择合适的驱动方式。
以上是关于STM32H7的SPI总线基础知识和HAL库API的主要内容,如果未能解决你的问题,请参考以下文章
STM32H7教程第36章 STM32H7的LPTIM低功耗定时器基础知识和HAL库API
STM32H7教程第57章 STM32H7硬件JPEG编解码基础知识和HAL库API
STM32H7教程第93章 STM32H7的SPI总线应用之驱动ADS1256(8通道24bit ADC, 增益可编程)