3d激光雷达开发(lidar使用)
Posted 费晓行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3d激光雷达开发(lidar使用)相关的知识,希望对你有一定的参考价值。
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
安装好了pcl库之后,下面就是需要想办法采集真实的雷达数据了。和camera不同,3d雷达一般需要单独购买。这方面,camera就强太多了,不仅手机有camera,电脑有camera,就算单独购买,也只要几百块钱。3d雷达则不同,最便宜的3d雷达也要3-4千块,多的可能大几万,这方面大家量力而行。有条件,可以自己购买;没有条件,可以申请单位购买;再不济,那就只能去看一下有没有别人不用的二手lidar了。
1、lidar品牌的选择
目前这方面,国内也是百花齐放,百家争鸣。不过,还是建议大家购买那些有一定知名度,自己也能负担得起的传感器雷达。对我们自己来说,就是购买了livox品牌的雷达。不为别的,主要是价格负担得起。
2、lidar的选择
目前来说,lidar的选择,还是来自于自己的需求。好的lidar视场角宽,看得远,但是价格也贵;便宜的lidar视场角一般,价格适中,比如说下面的mid40,视场角为38.4 * 38.4左右,

而mid70,视场角达到了70.4*70.4左右,

3、使用view工具显示雷达数据,
等从官方途径购买到了3d雷达之后,接着就是下载view工具,查看图像即可。
view工具下载地址如下所示,
https://www.livoxtech.com/cn/downloads
打开后,链接是这样的,
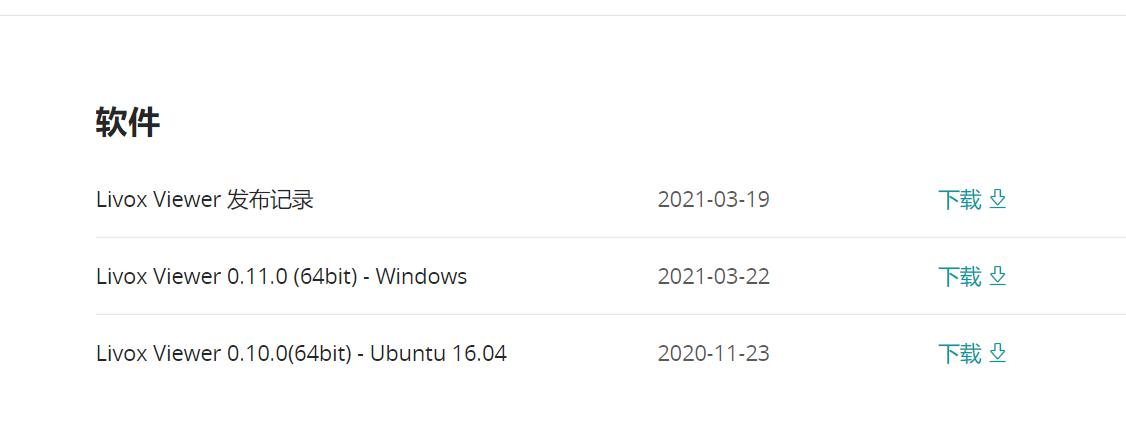
软件本身是绿色软件,只要把lidar和pc用网线直连在一起,网络配置成192.168.1.*即可。因为lidar默认就是这个网段的ip,pc配置成相同的一个网段后,就可以收到lidar发出来的广播包数据了。忘记说了,livox的雷达需要一个外接12v或者24v的电源,这一块需要准备下。

4、准备livox sdk
通过view软件确认可以,就可以准备sdk读取lidar数据了。这部分github上面有下载,地址如下,
https://github.com/Livox-SDK/Livox-SDK
可以把代码下载下来。
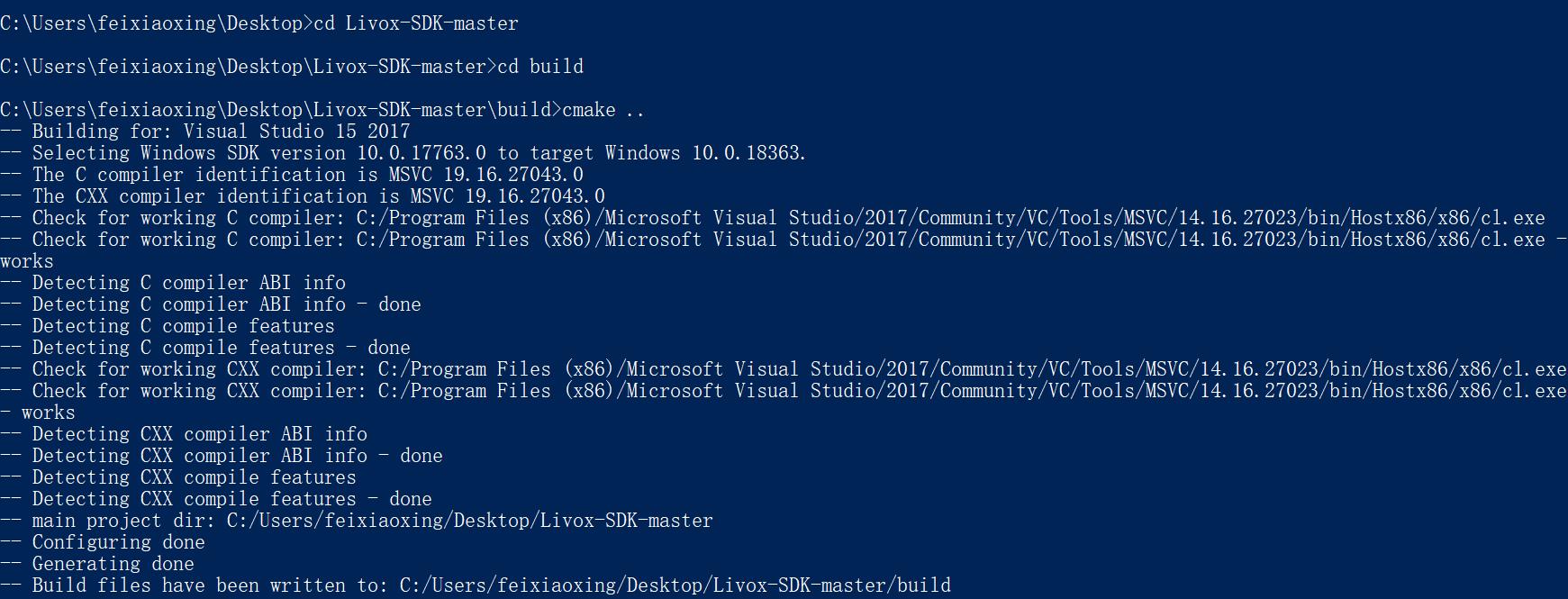
5、编译livox sdk
和pcl的编译差不多,livox sdk也是依赖于cmake才能完成的。
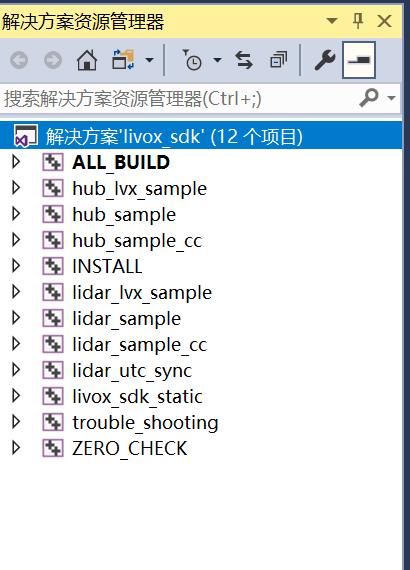
6、进一步编译livx_sdk.sln
打开sln工程后,可以看到很多的项目,这里面除了livox_sdk_static是静态库之外,其他都是exe程序。
编译没有问题的话,就会看到,所有的程序都已经编译成功,
7、雷达数据读取
所有sdk的示例代码中,可以重点关注lidar_sample、lidar_sample_cc这两个项目。前者是c语言,后者是cpp语言,就是这点区别,其他部分基本都是一样的。这里以lidar_sample举例,看一下官方提供的示例代码是这样的,
//
// The MIT License (MIT)
//
// Copyright (c) 2019 Livox. All rights reserved.
//
// Permission is hereby granted, free of charge, to any person obtaining a copy
// of this software and associated documentation files (the "Software"), to deal
// in the Software without restriction, including without limitation the rights
// to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
// copies of the Software, and to permit persons to whom the Software is
// furnished to do so, subject to the following conditions:
//
// The above copyright notice and this permission notice shall be included in
// all copies or substantial portions of the Software.
//
// THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
// IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
// FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
// AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
// LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
// OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
// SOFTWARE.
//
#include <stdio.h>
#include <stdlib.h>
#ifdef WIN32
#include <windows.h>
#else
#include <unistd.h>
#endif
#include <string.h>
#include "livox_sdk.h"
typedef enum
kDeviceStateDisconnect = 0,
kDeviceStateConnect = 1,
kDeviceStateSampling = 2,
DeviceState;
typedef struct
uint8_t handle;
DeviceState device_state;
DeviceInfo info;
DeviceItem;
DeviceItem devices[kMaxLidarCount];
uint32_t data_recveive_count[kMaxLidarCount];
/** Connect all the broadcast device. */
int lidar_count = 0;
char broadcast_code_list[kMaxLidarCount][kBroadcastCodeSize];
/** Connect the broadcast device in list, please input the broadcast code and modify the BROADCAST_CODE_LIST_SIZE. */
/*#define BROADCAST_CODE_LIST_SIZE 3
int lidar_count = BROADCAST_CODE_LIST_SIZE;
char broadcast_code_list[kMaxLidarCount][kBroadcastCodeSize] =
"000000000000002",
"000000000000003",
"000000000000004"
;*/
/** Receiving error message from Livox Lidar. */
void OnLidarErrorStatusCallback(livox_status status, uint8_t handle, ErrorMessage *message)
static uint32_t error_message_count = 0;
if (message != NULL)
++error_message_count;
if (0 == (error_message_count % 100))
printf("handle: %u\\n", handle);
printf("temp_status : %u\\n", message->lidar_error_code.temp_status);
printf("volt_status : %u\\n", message->lidar_error_code.volt_status);
printf("motor_status : %u\\n", message->lidar_error_code.motor_status);
printf("dirty_warn : %u\\n", message->lidar_error_code.dirty_warn);
printf("firmware_err : %u\\n", message->lidar_error_code.firmware_err);
printf("pps_status : %u\\n", message->lidar_error_code.device_status);
printf("fan_status : %u\\n", message->lidar_error_code.fan_status);
printf("self_heating : %u\\n", message->lidar_error_code.self_heating);
printf("ptp_status : %u\\n", message->lidar_error_code.ptp_status);
printf("time_sync_status : %u\\n", message->lidar_error_code.time_sync_status);
printf("system_status : %u\\n", message->lidar_error_code.system_status);
/** Receiving point cloud data from Livox LiDAR. */
void GetLidarData(uint8_t handle, LivoxEthPacket *data, uint32_t data_num, void *client_data)
if (data)
data_recveive_count[handle] ++ ;
if (data_recveive_count[handle] % 100 == 0)
/** Parsing the timestamp and the point cloud data. */
uint64_t cur_timestamp = *((uint64_t *)(data->timestamp));
if(data ->data_type == kCartesian)
LivoxRawPoint *p_point_data = (LivoxRawPoint *)data->data;
else if ( data ->data_type == kSpherical)
LivoxSpherPoint *p_point_data = (LivoxSpherPoint *)data->data;
else if ( data ->data_type == kExtendCartesian)
LivoxExtendRawPoint *p_point_data = (LivoxExtendRawPoint *)data->data;
else if ( data ->data_type == kExtendSpherical)
LivoxExtendSpherPoint *p_point_data = (LivoxExtendSpherPoint *)data->data;
else if ( data ->data_type == kDualExtendCartesian)
LivoxDualExtendRawPoint *p_point_data = (LivoxDualExtendRawPoint *)data->data;
else if ( data ->data_type == kDualExtendSpherical)
LivoxDualExtendSpherPoint *p_point_data = (LivoxDualExtendSpherPoint *)data->data;
else if ( data ->data_type == kImu)
LivoxImuPoint *p_point_data = (LivoxImuPoint *)data->data;
else if ( data ->data_type == kTripleExtendCartesian)
LivoxTripleExtendRawPoint *p_point_data = (LivoxTripleExtendRawPoint *)data->data;
else if ( data ->data_type == kTripleExtendSpherical)
LivoxTripleExtendSpherPoint *p_point_data = (LivoxTripleExtendSpherPoint *)data->data;
printf("data_type %d packet num %d\\n", data->data_type, data_recveive_count[handle]);
/** Callback function of starting sampling. */
void OnSampleCallback(livox_status status, uint8_t handle, uint8_t response, void *data)
printf("OnSampleCallback statue %d handle %d response %d \\n", status, handle, response);
if (status == kStatusSuccess)
if (response != 0)
devices[handle].device_state = kDeviceStateConnect;
else if (status == kStatusTimeout)
devices[handle].device_state = kDeviceStateConnect;
/** Callback function of stopping sampling. */
void OnStopSampleCallback(livox_status status, uint8_t handle, uint8_t response, void *data)
/** Query the firmware version of Livox LiDAR. */
void OnDeviceInformation(livox_status status, uint8_t handle, DeviceInformationResponse *ack, void *data)
if (status != kStatusSuccess)
printf("Device Query Informations Failed %d\\n", status);
if (ack)
printf("firm ver: %d.%d.%d.%d\\n",
ack->firmware_version[0],
ack->firmware_version[1],
ack->firmware_version[2],
ack->firmware_version[3]);
void LidarConnect(const DeviceInfo *info)
uint8_t handle = info->handle;
QueryDeviceInformation(handle, OnDeviceInformation, NULL);
if (devices[handle].device_state == kDeviceStateDisconnect)
devices[handle].device_state = kDeviceStateConnect;
devices[handle].info = *info;
void LidarDisConnect(const DeviceInfo *info)
uint8_t handle = info->handle;
devices[handle].device_state = kDeviceStateDisconnect;
void LidarStateChange(const DeviceInfo *info)
uint8_t handle = info->handle;
devices[handle].info = *info;
/** Callback function of changing of device state. */
void OnDeviceInfoChange(const DeviceInfo *info, DeviceEvent type)
if (info == NULL)
return;
uint8_t handle = info->handle;
if (handle >= kMaxLidarCount)
return;
if (type == kEventConnect)
LidarConnect(info);
printf("[WARNING] Lidar sn: [%s] Connect!!!\\n", info->broadcast_code);
else if (type == kEventDisconnect)
LidarDisConnect(info);
printf("[WARNING] Lidar sn: [%s] Disconnect!!!\\n", info->broadcast_code);
else if (type == kEventStateChange)
LidarStateChange(info);
printf("[WARNING] Lidar sn: [%s] StateChange!!!\\n", info->broadcast_code);
if (devices[handle].device_state == kDeviceStateConnect)
printf("Device Working State %d\\n", devices[handle].info.state);
if (devices[handle].info.state == kLidarStateInit)
printf("Device State Change Progress %u\\n", devices[handle].info.status.progress);
else
printf("Device State Error Code 0X%08x\\n", devices[handle].info.status.status_code.error_code);
printf("Device feature %d\\n", devices[handle].info.feature);
SetErrorMessageCallback(handle, OnLidarErrorStatusCallback);
if (devices[handle].info.state == kLidarStateNormal)
LidarStartSampling(handle, OnSampleCallback, NULL);
devices[handle].device_state = kDeviceStateSampling;
/** Callback function when broadcast message received.
* You need to add listening device broadcast code and set the point cloud data callback in this function.
*/
void OnDeviceBroadcast(const BroadcastDeviceInfo *info)
if (info == NULL || info->dev_type == kDeviceTypeHub)
return;
printf("Receive Broadcast Code %s\\n", info->broadcast_code);
if (lidar_count > 0)
bool found = false;
int i = 0;
for (i = 0; i < lidar_count; ++i)
if (strncmp(info->broadcast_code, broadcast_code_list[i], kBroadcastCodeSize) == 0)
found = true;
break;
if (!found)
return;
bool result = false;
uint8_t handle = 0;
result = AddLidarToConnect(info->broadcast_code, &handle);
if (result == kStatusSuccess)
/** Set the point cloud data for a specific Livox LiDAR. */
SetDataCallback(handle, GetLidarData, NULL);
devices[handle].handle = handle;
devices[handle].device_state = kDeviceStateDisconnect;
int main(int argc, const char *argv[])
printf("Livox SDK initializing.\\n");
/** Initialize Livox-SDK. */
if (!Init())
return -1;
printf("Livox SDK has been initialized.\\n");
LivoxSdkVersion _sdkversion;
GetLivoxSdkVersion(&_sdkversion);
printf("Livox SDK version %d.%d.%d .\\n", _sdkversion.major, _sdkversion.minor, _sdkversion.patch);
memset(devices, 0, sizeof(devices));
memset(data_recveive_count, 0, sizeof(data_recveive_count));
/** Set the callback function receiving broadcast message from Livox LiDAR. */
SetBroadcastCallback(OnDeviceBroadcast);
/** Set the callback function called when device state change,
* which means connection/disconnection and changing of LiDAR state.
*/
SetDeviceStateUpdateCallback(OnDeviceInfoChange);
/** Start the device discovering routine. */
if (!Start())
Uninit();
return -1;
printf("Start discovering device.\\n");
#ifdef WIN32
Sleep(30000);
#else
sleep(30);
#endif
int i = 0;
for (i = 0; i < kMaxLidarCount; ++i)
if (devices[i].device_state == kDeviceStateSampling)
/** Stop the sampling of Livox LiDAR. */
LidarStopSampling(devices[i].handle, OnStopSampleCallback, NULL);
/** Uninitialize Livox-SDK. */
Uninit();
如果用户需要自己读取数据,只需要修改一下上面这段代码,然后合入到自己的项目当中,略作调整即可。
以上是关于3d激光雷达开发(lidar使用)的主要内容,如果未能解决你的问题,请参考以下文章