TAS-LR 论文辅助笔记 & 图拉普拉斯正则项推导
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了TAS-LR 论文辅助笔记 & 图拉普拉斯正则项推导相关的知识,希望对你有一定的参考价值。
1 图拉普拉斯正则项的直观目标函数
我们已知一张图G的邻接矩阵A,和度矩阵D,那么我们就知道他的拉普拉斯矩阵L=D-A
在使用矩阵分解的时空数据补全问题中,有一些文献使用图拉普拉斯正则化项来对空间特征矩阵进行约束
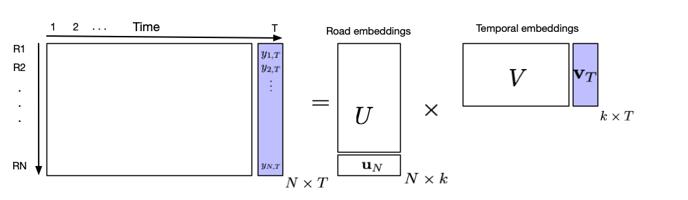
我们假设低秩的空间特征矩阵为U,其中每一列为
拉普拉斯正则项的直观解释是 ,也就是让相邻的空间点之间的特征差距不要太大
,也就是让相邻的空间点之间的特征差距不要太大
2 图拉普拉斯正则项的转化
我们对直观解释的拉普拉斯正则项进行转化
考虑第i项






但是按照矩阵维度来说,应该是 【不知道是哪一步错了,欢迎评论区指正】
【不知道是哪一步错了,欢迎评论区指正】
所以此时的拉普拉斯正则项相当于是限制空间上相邻点之间特征的平滑性
如果是每一行是一个点的特征,同理

以上是关于TAS-LR 论文辅助笔记 & 图拉普拉斯正则项推导的主要内容,如果未能解决你的问题,请参考以下文章