知领·报告 | 车路协同技术发展态势分析报告.md
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了知领·报告 | 车路协同技术发展态势分析报告.md相关的知识,希望对你有一定的参考价值。
0 摘 要
车路协同是当前智能交通领域的研究热点和发展趋势,是新一轮科学技术及产业发展的重要竞争领域,对提升交通安全、缓解交通拥堵、促进节能减排、拉动上下游产业有重要意义[1]。车路协同的构成涵盖“产、学、研、用”,涉及“人、车、路、中心、环境、服务”及新技术,由学术研究、产业研发、标准制定、应用主管等机构共同参与并推动发展。
本报告梳理了国内外车路协同领域发展政策,总结了车路协同关键技术、产业链发展及应用示范成效,进而选取学术研究和产业研发视角,采用文献计量法,采集2011-2020年Web of Science核心合集下SCI期刊论文、中文核心期刊论文[ 本报告中的中文核心期刊包含北京大学中文核心期刊目录、中国科学引文数据库和中文社会科学引文索引。]以及Derwent Innovation专利文献,利用Cite Space、VOSviewer、Derwent Data Analyzer等软件,通过对文献的数值统计和图谱计算,分析车路协同领域研究与研发的产出分布、国家(地区)分布、机构/专利权人分布、学者分布、技术热点分布等发展现状,揭示车路协同领域的产出规模、顶尖研究团队/学者及合作、重要专利权人及布局、技术主题/热点等当前发展态势。
通过对车路协同推进政策、研究特征和热点、专利布局、产业发展等的分析,认为因素推动车路协同技术快速发展,车路协同研究处于发展初期,国际、国内研究主题和热点基本吻合,多车路协同领域技术研发主要集中于产业链的中上游,技术研发主体主要包括信息与通信企业、汽车及零部件生产商和计算机及软件制造商,美国、中国等市场受到普遍关注,车路协同是适合中国国情的自动驾驶技术发展路径。
1 国内外车路协同发展政策
智能驾驶、车路协同等技术是当前ITS领域的研究热点和发展趋势,是新一轮科学技术及产业发展的重要竞争领域。车路协同系统采用先进的车联网、物联网等技术,实现车车、车路动态实时信息交互,并在全时空交通信息采集与融合的基础上,开展车辆主动安全控制和道路协同管理,从而形成的安全、高效的智能交通系统[2]。车路协同是智能交通系统的重要构成部分,是世界各国极力投注资源推动的重点之一,在美国、欧盟、日本和韩国等众多先进国家尤其受到重视。
1.1 中国政策
近年来,中国高度重视自动驾驶、智能网联汽车的发展,将其视为汽车产业升级的必备条件。2015年以来,由国务院协调,国家发改委、交通运输部、工业和信息化部密集出台了一系列推动车路协同和智慧交通发展的政策文件,在技术创新、标准规范、示范应用、产业培育、应用推广等各个环节,开展有目的、有计划的产学研用联动,为车路协同技术发展和服务创新提供必要的环境条件。北京、上海、广州、重庆等地区也出台了推进车路协同在地方落地的一系列政策措施。表中所示为中国出台的国家和行业层面推进车路协同发展的主要政策文件。

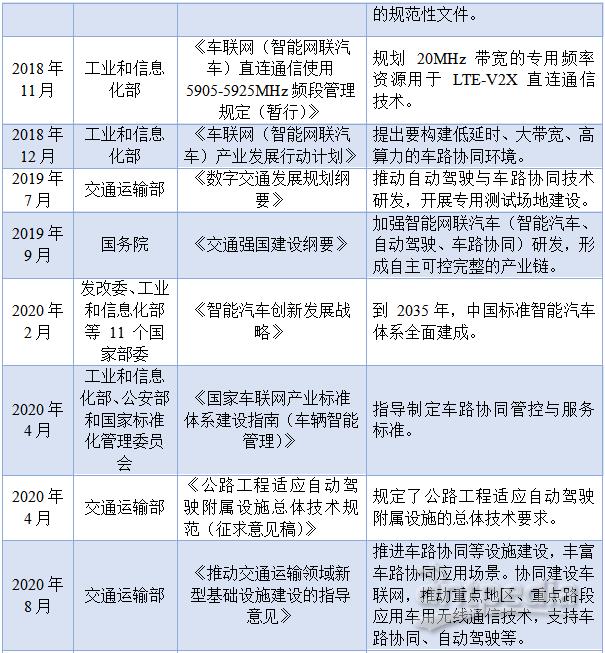
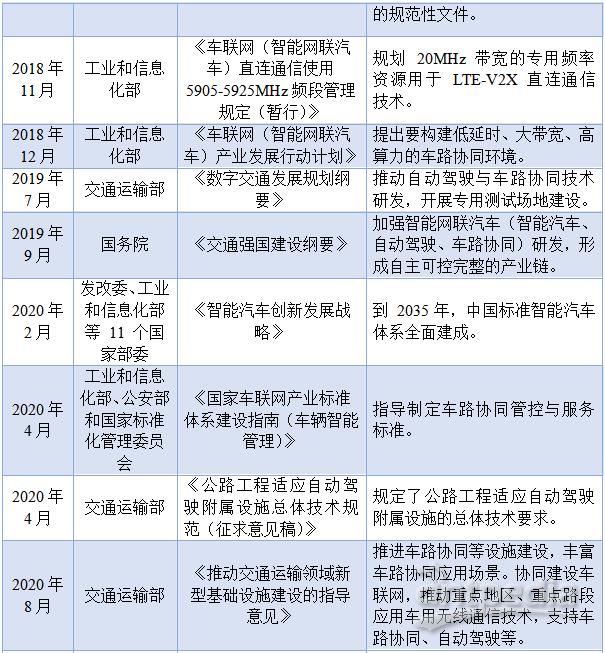
中国车路协同领域主要政策
1.2 美国政策
美国对自动驾驶汽车领域的政策引导和支持始终走在世界前列。从2010年起,美国将自动驾驶汽车产业的发展逐步提升至国家战略,在联邦政府层面出台了四项支持自动驾驶技术发展的战略性文件,并推动各州和地方政府积极开展自动驾驶立法,以尽快实现自动驾驶汽车路测和商业化应用。
2003年,美国交通部发布了VII车路协同系统项目,2009 年更名为IntelliDrive并纳入了原独立进行的CICAS协同式交叉路口碰撞防止系统和Safe Trip-21两个项目,2011年再次更名为智能互联汽车研究(CVR)。2010年,美国交通部发布了《智能交通战略研究计划 2010-2014》,对美国车联网技术的发展目标、实现途径以及智能交通系统建设等问题进行了详细规划部署。2013年,美国高速公路交通安全管理局发布的“对自动驾驶车辆管制政策的初步意见”中,表明支持自动驾驶技术发展和推广。2015年美国交通运输部与美国智能交通系统(ITS)共同发布了《智能交通系统战略规划 2015-2019》,明确了未来5年在智能交通领域的发展方向。2015年,美国交通部部署车联网发展试点项目(Connected Vehicle Pilot Deployment Program),投入4500万美元计划在纽约、怀俄明和坦帕市展开试点工作,支持车联网技术发展。2016年9月,美国交通部发布了全球首个自动驾驶汽车政策文件——《联邦自动驾驶汽车政策:加快道路交通安全的全新变革》,从自动驾驶汽车性能指南、州政策模式、现行国家公路交通安全管理局监管工具和现代监管工具四个方面,建立了非强制性的自动驾驶汽车安全评价体系,明确了联邦政府和各州政府在自动驾驶汽车监管上的具体职责,指导各州政府按照统一模式制定政策法律,为高度自动驾驶的安全设计、开发、测试和应用等监管工作提供了一个具备指导意义的前期规章制度框架。2016 年12月,美国交通部正式发布《联邦机动车安全标准——第 150 号》(FMVSS No.150),推动 DSRC 强制安装立法,计划将在 2023 年强制所有轻型车辆配备车用 DSRC 技术。2017年9月,美国交通部发布《自动驾驶系统2.0:安全愿景》,取代了之前的指南,主要内容为“自愿性自动驾驶系统指南”和“对美国各州政府的技术性支持(最佳监管实践)”,面向SAE 3级到5级自动驾驶系统,澄清监管流程,明确企业能够立即开始自动驾驶系统的测试与部署,剔除了安全自我评估中的不必要元素,明确联邦政府和州政府将在未来自动驾驶系统发展中各自扮演的角色,鼓励自动驾驶汽车技术的安全开发、测试与部署,建设示范区、开放道路测试,为自动驾驶技术的研发测试进一步扫除法律障碍。2018年发布《准备迎接未来交通:自动驾驶汽车 3.0》,阐明了联邦政府对自动驾驶汽车未来决策、法规和策略进行评估的基本原则,鼓励建立全国统一的监管框架和运营环境。该指南拓展了自动驾驶范围,将公路运输和道路等交通系统纳入其中。推动自动驾驶技术与地面交通系统多种运输模式的安全融合。美国加州放开道路测试,允许开展试点项目逐步推进自动驾驶的商业化进程。2018 年9月,美国联邦通信委员会(FCC)发布《促进美国在5G 技术计划中的优势》战略性文件,强调促进可用于支持V2V、V2X数据交换的高速通信技术研发是政府当前的首要任务。2020年1月,美国联邦运输部发布了《确保美国在自动驾驶汽车技术方面的领导地位:自动驾驶汽车4.0》,提出优先考虑安全和保障、推动创新和确保一致的监管方法,以及涵盖用户、市场以及政府三个方面的十大技术原则。同时,明确了联邦政府在自动驾驶汽车领域的主导地位。
1.3 日本政策
近年来,日本为增强汽车产业竞争力、缓解交通拥堵、减少交通事故、应对老龄化人口交通出行困难等问题,积极部署自动驾驶汽车技术,在国家层面出台了一系列政策法规文件,推动自动驾驶汽车产业的发展。近年来,日本为增强汽车产业竞争力、缓解交通拥堵、减少交通事故、应对老龄化人口交通出行困难等问题,积极部署自动驾驶汽车技术,在国家层面出台了一系列政策法规文件,推动自动驾驶汽车产业的发展。2013年,日本内阁发布日本复兴计划《世界领先IT国家创造宣言》,其中智能网联汽车成为核心之一。据此,内阁指定国家级科技创新项目《SIP战略性创新创造项目计划》,将自动驾驶系统研发上升为国家战略高度。指定《ITS2014-2030技术发展路线图》,计划在2020年建成世界最安全道路,在2030年建成世界最安全和最畅通道路。2014年,日本内阁指定《SIP(战略性创新创造项目)自动驾驶系统研究开发计划》,指定四个方向共计32个研究课题,推进基础技术以及协同是系统相关领域的开发与实用化。2015年,日本经济产业省与国土交通省建立自动驾驶研究工作组,车辆厂商、学者、利益相关机构等自动驾驶领域各界人士参加。通过定期开展研讨会,制定日本自动驾驶技术路线图,讨论自动驾驶测试与验证方式,并推动相关国际标准的协调工作。2016年上半年,日本经济贸易产业省成立了一个研究小组,决定联手车企在地图、通讯、人类工程学及其他领域展开合作,以实现到2020年在公共道路上测试自动驾驶汽车。2016年5月,日本警察厅发布《关于自动驾驶系统的公共道路测试指南》,旨在通过规定在日本国内的公共道路中实施运用自动驾驶系统来驾驶汽车的实证测试时,从保证交通安全和顺畅的角度来看所需要注意的事项,达到为实施合理和安全的公共道路实证测试做出贡献的目的。2017年6月,日本警察厅发布《远程自动驾驶系统道路测试许可处理基准》,将远程监控定位为远程存在、承担道路交通法规规定责任的驾驶人,允许自动驾驶车辆在驾驶位无人的状态下进行上路测试。2018年,日本内阁发布《2017官民ITS构想及路线图》,自动驾驶推进时间表时,2020年左右在高速公路上实现自动驾驶3级,2级以上卡车编队走行,以及特定区域内用于配送服务的自动驾驶4级。2018年3月,日本政府出台《自动驾驶相关制度整备大纲》明确自动驾驶汽车的责任划分,原则上由车辆所有者承担赔偿责任,将自动驾驶汽车与普通汽车同样对待;在外部黑客入侵汽车系统导致事故的损害由政府赔偿。2018年9月,日本国土交通省汽车局出台《自动驾驶汽车安全技术指南》,明确规定了L3、L4级自动驾驶汽车所必须满足的10大安全条件。2019年3月颁布《道路交通法》修正案,2019年5月颁布《道路运输车辆法》修正案。2019年9月发布《自动驾驶的公共道路测试使用许可标准》(《关于自动驾驶系统的公共道路测试指南》的修订版本),通过五个方面的修订措施推动自动驾驶技术的商业化普及,目标是2020年左右实现高速公路上的L3级自动驾驶,2020年底前实现特定区域的无人驾驶移动服务,2020年底前使得自动刹车在新乘用车上的搭载率达到90%以上。2020年,日本政府继续在内阁牵头启动的SIP(战略性创新创造方案)项目目标下,有计划地稳步推进自动驾驶技术的发展和各项为自动驾驶汽车商用化和实用化所做的实证试验。
1.4 欧盟政策
自 2014年以来,欧盟通过制定相关战略和技术路线图等方式,引领、 支持自动驾驶发展。2006-2010年欧盟资助欧洲道路交通通信信息技术实施协调组织(European Road Transport Telematics Implementation Coordination Organization)牵头开展协同式智能交通系统(Cooperative Intelligent Transport Systems, C-ITS)项目,预算为4100万欧元,在6个国家的试验场落地实施,开发、示范和评估CVIS系统在城市和城市间环境的货运和车队和公共运输管理方面的应用,其主要成果是开发和检验了能够实现车和路侧单元一体化的硬件和软件原型。2011年欧盟委员会在《欧盟一体化交通白皮书》中提出重点发展车辆智能安全、信息化及交通安全管理。2013年欧盟推出的“地平线2020计划”中,提出推动合作式智能交通、汽车自动化、网联化及产业应用。2014年11月,欧盟委员会创建了C-ITS平台,依托该平台,国家机构、C-ITS利益攸关方和欧盟委员会可以共同部署规划C-ITS在欧盟的发展,为制定C-ITS路线图和战略提供政策建议,并为一些关键的交叉领域问题提供可能的解决方案。研究协作式网联和自动化出行相关问题,接受资助开展试点项目。2016年4月,欧盟28个成员国共同签署了《阿姆斯特丹宣言》,这份宣言声明了欧盟将如何部署、发展自动驾驶技术并制定相应的实施措施,成为推动汽车制造商、国家政府和欧盟机构之间合作的重要基础。2016年12月,欧盟发布了《欧洲C-ITS战略》,其目标是促进整个欧洲范围内投资和监管框架的融合,到2019年,利用多项通信技术,实现车辆之间和车辆与道路基础设施之间的“对话”,进而开展C-ITS的大规模商业化部署,以提升道路安全、交通效率和驾驶舒适度,帮助驾驶员做出正确的决策。2018年欧盟公布自动驾驶推进时间表,各国大力推动道路测试;欧盟运输总司出台 Delegated Act 法案征求意见稿,意图在欧洲推进合作式智能交通运输系统的部署。2019年3月,欧盟更新发布了《智能网联汽车路线图》(Connected Automated Driving Roadmap),增加了网联式自动驾驶的内容,强调基于数字化基础设施支撑的网联式协同自动驾驶(Infrastructure Support levels for Automated Driving,ISAD)。2019年,欧盟委员会发布了《协同、网联和自动化交通STRIA路线图》(STRIA Roadmap on Connected and Automated Transport-Road, Rail and Waterborne),按照欧盟自动驾驶的愿景和目标,对照欧盟发展自动驾驶技术面临的挑战,制定公路、铁路、水路三种运输方式的自动驾驶研发路线图。
2 车路协同关键技术及产业链
2.1 车路协同关键技术
中国公路学会自动驾驶工作委员在《车路协同自动驾驶发展报告(1.0版)》中指出车路协同自动驾驶关键技术包括:环境感知技术、融合与预测技术、智能决策技术、控制执行技术、I2X和V2X通讯技术、网络安全技术、协同优化技术、交通系统集成优化技术。
东南大学-威斯康星大学智能网联交通联合研究院院长、中国公路学会自动驾驶工作委员会主任委员冉斌认为,未来车路协同自动驾驶的关键技术或将朝着融合北斗卫星和路侧设施的高精度高可靠定位、以视觉识别和激光雷达为核心的感知技术、基于云技术的智能网联交通分布式云平台、融合网联化智能技术的自动驾驶技术,以及车路一体化自动驾驶的交通系统优化技术等方向融合发展[3]。
国家863计划现代交通技术领域专家组副组长、北京航空航天大学教授王云鹏曾提出,车路协同关键技术分4大类,即智能车载系统关键技术、智能路侧系统关键技术、车车/车路通信技术、车车/车路控制技术。智能车载系统关键技术包括车辆精准定位和高可靠通信技术、车辆行驶状态及环境感知技术、车载一体化系统集成技术;智能路侧系统关键技术包括多通道交通状态信息辨识与采集(多通道交通流量检测、道路异物侵入信息采集、路面湿滑状态信息采集、密集人群信息采集、交叉口行人信息采集、突发事件快速识别与定位);车车/车路通信技术包括高速移动状态下的多信道、高可信、高可靠的车路/车车信息交互与融合(车辆动态分簇融合技术、路侧通信设备的位置优化技术、兼容何种无线网络协议的多模式连接技术、高速车辆环境下稳定高效的切换及路由技术、密集车辆场景下公平高效的多信道接入控制技术、稀疏车辆场景下可信可靠的信息融合技术)和通信模式(无线广域网、无线局域网、专用短程通信、自组织网路、传感器网络、蜂窝-3G);车车/车路控制技术包括基于车路协同信息的交叉口智能控制技术、基于车路协同的集群诱导技术、交通控制与交通诱导协调优化技术、动态协同专用车道技术、精准停车控制技术、智能车速预警与控制、弯道侧滑/侧翻事故预警、无分隔带弯道安全会车、车间距离预警与控制、临时性障碍预警等。
在华为《车路一体化智能网联体系》报告中,车路协同关键技术包括:车用无线通信技术、高精度定位技术、高精度地图生成与更新技术、车路协同的自动驾驶技术、安全隐私技术、人车交互技术、交通状况全面感知技术、交通信号优化技术[4]。
《中国车路协同行业现状深度调研与发展趋势报告(2020-2026年)》提出,车路协同关键技术包括无线收发设备(路侧设备、车载设备)、网络及定位技术支持。路侧设备中的监控摄像头、交通信号机、基站GPS、RSU处理,车载设备中的车辆定位装置、车辆状态装置、 移动终端设备,网络及定位技术支持中的互联网、高精度定位[5]。
《2020年中国车路协同行业分析报告-市场运营态势与发展前景研究》提出,车路协同的关键技术包括:数据交互、高精度定位、多功能车载集成终端、高集成度智能路侧系统、多传感器(异构多元信息)融合技术[6]。
《2020-2025年中国车路协同行业发展现状与趋势预测研究报告》中将车路协同的关键技术分为智能车载系统关键技术和智能路侧系统关键技术。车载系统关键技术包括车辆精准定位与高可靠通信技术、车辆行驶安全状态及环境感知技术、车载一体化系统集成技术;路侧系统关键技术包括多通道交通状态信息辨识与采集、车车/车路通信技术、车车/车路控制技术[7]。
《车路云一体化融合控制系统白皮书》[8]提出,云控系统作为一类新型信息物理系统,融合了多种学科、不同领域的前沿技术,其建设和发展需要攻克架构、感知、控制和通信等方面的众多关键技术,包括边缘云架构技术、动态资源调度技术、感知与时空定位技术、车辆与交通控制技术以及云网一体化技术等。
2.2 车路协同产业链
车路协同产业涉及面广、产业链长、跨界融合特征突出,涵盖设备制造、系统集成、应用服务等多个行业领域。
中国公路学会自动驾驶工作委员会《车路协同自动驾驶发展报告(1.0版)》指出车路协同产业链上中下游分别为:上游主要为关键技术与基础设施供应,包括了5G通信、互联网技术、智慧道路建设改造、专用芯片和智能算法、传感器与高精度地图;中游主要为智能制造和系统集成供应,包括了智能化转型的传统汽车企业、传统交通企业与互联网企业、“车路协同智能”数据与系统集成产业;下游主要为应用服务与增值服务供应,包括了汽车即服务、共享出行、自动驾驶货运、智能交通应急救援和其他驾驶员培训、保险等关联产业。
《面向零拥堵的车路协同新型架构及产业生态重构》基于车路协同定义,提出其产业链由一软一硬两大产业链构成[2]。一方面,硬件设备是整个车路协同产业链的基础,包括硬件设备提供商分为通信芯片厂商华为、大唐、高通等企业,车载终端设备厂商大唐、华为、东软、星云互联、金溢、千方科技、万集、华砺智行等,整车厂即 V2X 终端设备载体的生产者与开发者,如日本丰田、美国通用、奥迪、沃尔沃、一汽、上汽、长城;路侧设备厂商有大唐、华为、东软、星云互联、千方科技、万集科技、阿里巴巴;网络建设运营商有中国移动、中国联通、中国电信等三大电信运营商均在探索 V2X 商业模式及组网架构。另一方面,软件产业链是车路协同产业链中的核心与关键,包括了TSP(Telematics Service Provider)对车主用户数据进行管理的运营商,在整个产业中处于价值链的核心地位,代表企业有启迪云控、华为等;各大商业区、旅游景区、服务区、加油站、学校、酒店、办公区等;车路协同新型平台提供及运营商是整个系统平台落地实施的主体,也是最关键的实施操作者;各大运营车辆公司,即货运车辆、出租车、公交车、共享出行公司等搭建的运营平台;路侧设备运营商,与车路协同新型平台提供及运营商对接,与各大商业区、旅游景区、服务区、加油站、学校、酒店、办公区等积极协商,通过数据交互提供相应的事业扩展功能应用。
中国信息通信研究院《车联网白皮书》提出,车路协同产业链包括基础层、平台层和应用层[10]。基础层主要由终端设备和通信平台。终端设备即为RSU/OBU硬件设备生产,具体有路侧基站、路侧天线、边缘服务器、T-BOX、车载大屏等,主要参与方包括华为、大唐电信、东软集团、千方科技等;通信平台主要指通信芯片和通信模组,芯片供应商主要有高通、华为、大唐电信、Autotalks,通信模组供应商有中兴、日本Alps电气、希迪智驾等。平台层主要指平台服务商和通信运营商。平台服务商包括阿里巴巴集团、滴滴出行、苹果、谷歌等互联网企业,通信运营商有中国移动、中国电信、中国联通等等。应用层指提供应用功能的企业,包括高精度定位和地图服务、安全测试认证等等,参与企业有四维图新、高德地图、百度、华为、中兴等等。
2.3 车路协同应用示范
智能网联汽车是车路协同研究与研发落地的重要载体。发达国家斥资建设智能网联汽车测试示范区,通过测试评价和示范应用解决智能网联汽车实际运营中的技术难题,推动自动驾驶与车联网技术发展,引导产业标准规范制定,抢占智能网联汽车行业优势地位。我国相关部委及地方政府对智能网联汽车产业发展的重视程度也不断上升,各地示范区建设步伐不断加快,以期能与现有汽车产业转型升级相结合[11]。
以美国为例,2015年7月,由密歇根大学和密歇根州交通部共同出资建立的“无人驾驶小镇MCity”宣布对外开放。这座小镇位于安娜堡市,占地194英亩,是世界首个专门为测试无人驾驶汽车、V2V/ V2I车联网技术而打造的无人驾驶测试试验区。MCity的车道线总长约8公里,设置有多沖道路和路侧设施模拟实际道路环境,主要包括用于模拟高速公路环境的高速实验区域和用于模拟市区与近郊的低速实验区域。其中,模拟市区的低速试验区完全模仿普通城镇建造,包含两车道、三车道和四车道公路,以及交叉路口、交通信号灯和指示牌等,提供了真实的路面、标志标线、斜坡、自行车道、树木、消防栓、周边建筑物等真实道路场景元素。目前小镇已与福特、通用、本田、日产、丰田、德尔福等15家车企及零部件供应商以注资方式展开合作。此外,美国交通部还指定了10个自动驾驶试点试验场,包括托马斯·D·拉尔森交通研究所、美国陆军阿伯丁测试中心等,分布于9个州,使智能网联汽车可以在更加丰富的条件下开展测试。
除美国外,其他国家的主要示范区还包括,英国网联与自动驾驶汽车测试设施集群、日本机动车研究所J-town试验场地场、德国法国跨境公路测试区、瑞典AstaZero主动安全测试区、京畿道华城市汽车安全研究院建设自动驾驶汽车试验场地(K-City)等。
借鉴国外经验,我国智能网联汽车测试示范区规划建设工作正在快速推进,工信部首先通过智能制造试点示范项目批准了国家智能网联汽车(上海)试点示范区,之后又与北京-河北、重庆、浙江乌镇及云栖小镇、湖北武汉、吉林长春等地方政府签署了“基于宽带移动互联网智能汽车与智慧交通应用示范”合作框架协议,还与公安部、江苏省政府签署共建“国家智能交通综合测试基地”合作协议,同四川省政府基于“中德合作智能网联汽车、车联网标准及测试验证试点示范”项目签署相关协议,初步形成了“5+2+1”的智能网联汽车测试示范区分布格局。
除工信部同各地方政府合作推进的测试示范区之外,交通运输部也初步认定了三家“自动驾驶封闭场地测试基地”,分别为长安大学车联网与智能汽车试验场、公路交通综合试验场以及重庆车辆检测研究院试验场。同时,国家认证认可监督管理委员也正式批复中国汽车技术研究中心有限公司及襄阳达安汽车检测中心有限公司筹建“国家智能网联汽车质量监督检验中心”。此外,部分省市也通过机构合作等方式打造基于自身产业发展需求的智能网联汽车测试基地,使得智能网联汽车测试示范在全国呈现出“百花齐放”的景象[12]。
国内智能网联汽车测试示范区分布[13]

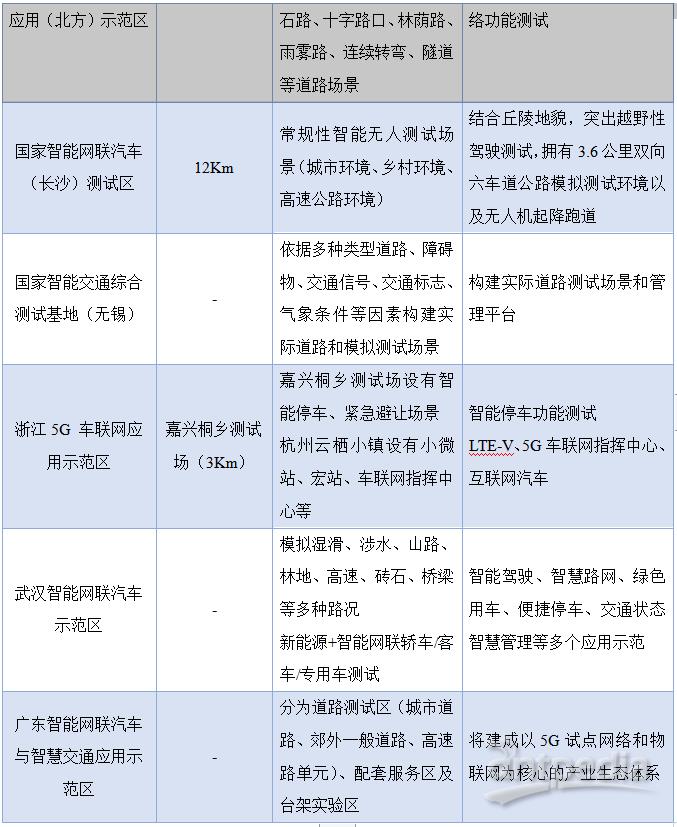
国内部分智能网联汽车测试示范区概况[14]
3 车路协同研究态势
采集2011-2020年Web of Science核心合集下车路领域研究领域SCI期刊论文以及来自中国知网的中文核心期刊论文信息,采用科学知识图谱方法,对论文数据进行分析,揭示车路协同领域研究趋势、研究热点、演进特征、研究前沿和发展趋势。
2011-2020年期间,车路协同领域发表SCI论文1028篇,中文核心期刊论文1119篇(国外机构参与发文25篇,2篇为第一作者),产出呈现增长趋势,如图2所示。其中,2011-2017年间的发文量稳步增长,2017-2019年的发文量持续快速增长,于2019年达到高峰点。与SCI全球论文发文趋势相比,2017-2018年SCI中国发文量增长幅度较为平稳,2018年中文核心期刊发文量在前一年达到较高水平后略有下降。
注:由于数据库收录的原因,2020年的数据不作为参考。
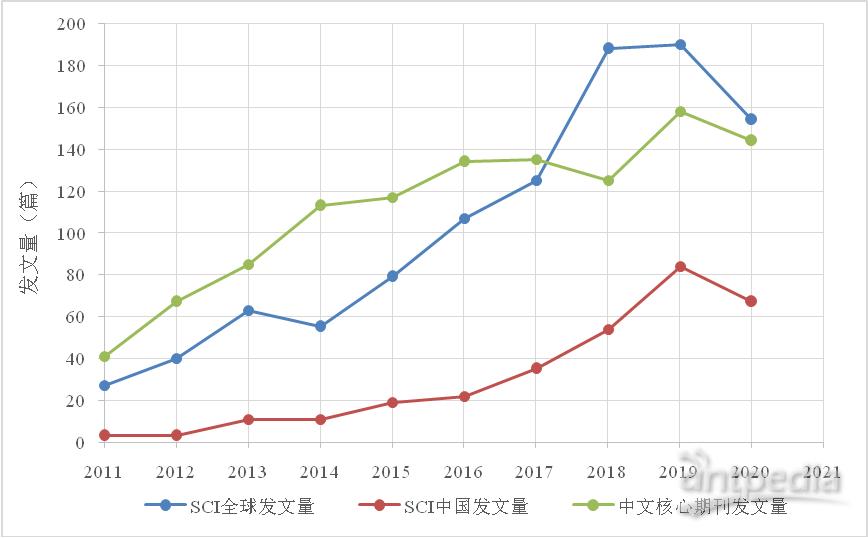
图 2车路协同领域论文发展趋势
采用词频分析和共词分析相结合的方法绘制期刊论文关键词共现图谱,如图3所示。图3 显示,车路协同领域研究热点集中在以下5个方向。
1. 围绕通讯系统,开展基于DSRC、5G的车车/车路网技术研究(蓝色虚线圈内)
包括V2V通信、V2X/C-V2X通信、车用移动通信网络、认证协议、信道划分和资源分配、数据物理层安全等。V2V、V2X/C-V2X、IEEE 802.11P、DSRC、5G、VANET、Resource Allocation、Channel、Wireless Network、Protocol、Data Dissemination、Scheme等关键词间存在关联关系。
2. 围绕路侧系统,开展车辆智能感知技术研究(红色虚线圈内)
包括传统路侧系统、路侧雷达、实时行车环境感知、运行状态监控、突发事件识别等。RSU、V2I、VANETs、Road Traffic Control、Analytical Model等关键词间存在关联关系。
3. 围绕车载系统,开展车辆群体协作控制技术研究(黄色虚线圈内)
包括交通信号控制、队列长度评估、车辆跟驰模型稳定性分析、随机交通场景、网联车渗透率等研究。Traffic Signal Control、Travel-Time Algorithm、Probe Vehicle、Queue Length Estimation、Signalized Intersections等关键词间存在关联关系。
4. 围绕车载系统,开展行车安全技术研究(绿色虚线圈内)
包括主动/协同避撞、(协同)自适应巡航控制、驾驶员行为适应性分析、交通流动态控制等。AVs、CACC、Experimental Validation、Variable Speed Limit、Drivers、Behavior、Cooperative Driving、Traffic Flow、Dynamic等关键词间存在关联关系。
5. 生态驾驶相关研究(紫色虚线圈内)
包括生态驾驶系统、燃油消耗量、能效优化控制等研究内容。EVs、Eco-Driving、Fuel Consumption、Fuel Economy、Emission、Efficient、Framework、Optimization等关键词间存在关联关系。

图 3车路协同领域SCI论文关键词相关关系图
对高频关键词进行时间序列分析,形成期刊论文高频关键词随时间变化趋势图谱,如图4 所示。图中节点的大小代表关键词出现的频次。节点较大的高频关键词的利用频次较高,如V2V、VANETs、V2I、Connected Vehicle、ITS、Model、Design、Safety等,这些词所代表的领域车路协同研究的重要基础。同时,被粉色色环环绕的关键词,如V2I、DSRC、5G、Autonomous vehicle、Resource Allocation、Protocol、algorithm、Dynamic等,为高中介中心度关键词,它们是连接高频关键词的重要术语,在该领域的研究演进中发挥着重要作用。
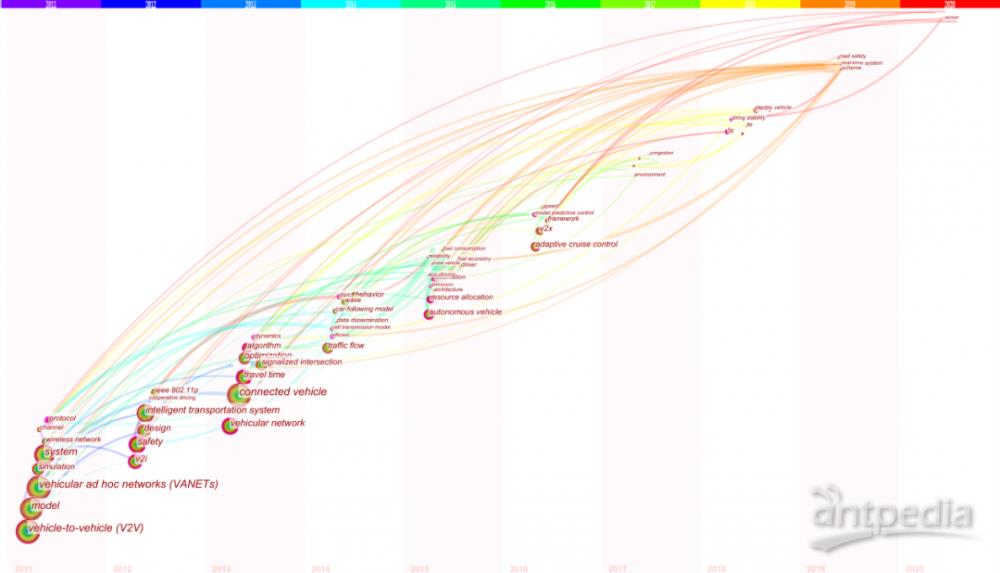
图 4期刊论文高频关键词随时间变化趋势图
在车路协同领域研究中,V2V、VANETs、Wireless Network及其System、Model、Simulation、Protocol等研究起步于2011年前后,从节点的年轮颜色判断,它们几乎跨度了整个研究时段。随着研究的推进,2012年期间,V2V研究延伸至V2I,有关V2I系统,以及IEEE 802.11P、Safety等成为新兴研究内容。2013-2014年期间,出现了Vehicular Network、Connected vehicle、DSRC,有关Signalized Intersection的Travel Time及其algorithm,有关Car-following Model的Dynamic,有关Data Dissemination的protocol、Efficient等研究。2015-2016年期间,该领域对Autonomous vehicle、Resource Allocation、adaptive cruise control、V2X、Eco-driving、Probe Vehicle、Fuel Consumption、Fuel Economy等进行了研究探索。在最近的4年研究周期中,围绕5G、Electric Vehicle,有关adaptive cruise control的String Stability和Congestion,围绕VANETs的Environment,围绕V2X的Sensor等成为新的研究方向。
采用统计方法,统计2011-2020年间每一年的发文量,绘制期刊论文随时间变化趋势图,如图5所示。图5显示了2011-2020年期间,车路协同领域SCI论文和中文核心期刊论文发文量年度趋势变化。整体来看,十年间,SCI论文产出呈现增长趋势。其中,2011-2017年间的发文量稳步增长,2017-2019年的发文量持续快速增长,于2019年达到顶峰。与SCI全球论文发文趋势相比,2017-2018年SCI中国发文量增长幅度较为平稳,2018年中文核心期刊发文量在前一年达到较高水平后略有下降。
注:由于数据库收录的原因,2020年的数据不作为参考。
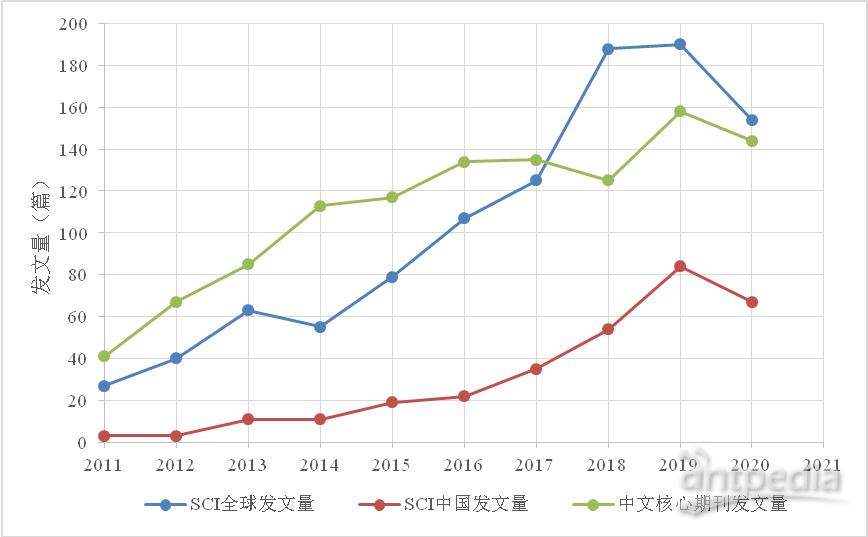
图 5 SCI论文发文量年度变化图
总体上,国际、国内研究主题和热点基本吻合,即围绕车联网、车载网、V2V、V2X、车路协同系统、智能交通系统、自动驾驶汽车、智能网联汽车等开展无线通信、车车/车路控制方向研究。两者相比,国际研究的方向更为丰富,发展阶段的划分更为清晰,与研发方向更为契合。
在信息通信方向,DSRC、LTE-V2X及其信道划分和资源分配、数据传输和隐私保护、广播协议和安全通信、路由协议等是国际、国内的共同研究内容,并且国际、国内研究均经历了从V2V到V2I再到V2X的发展历程。其中,对于V2V、车载网、路由协议、IEEE 802.11p、智能网联汽车等研究的时间起点基本一致,前三者开始于2011年,后两者分别在2012、2015年前后出现。国际、国内研究的不同点包括:第一,该方向在国内研究中的占比多于国际。从排名前50的高频关键词分布上看,在国内研究中特指该方向的关键词有37个,在国际研究中有13个。从研究主题聚类上看,国内研究将该方向细分为多个主题,除国际研究亦体现出的车车通信,车路通信,车联网/车载网数据传输、隐私保护、路由协议、资源分配等内容外,国内研究还具体阐述了路由算法、移动边缘计算、网络吞吐量和通信延迟等内容;第二,国际与国内分别围绕DSRC和LTE-V2X开展车联网通信研究。DSRC已被美国交通部确认为V2V标准,欧盟的协同式智能交通系统和日本的V2X(C-ITS)也是基于DSRC技术,而我国倾向于采用LTE-V2X。从词频上看,DSRC和LTE-V2X分别为国际、国内研究中的高频关键词,两者偏重不同技术主体;第三,有关V2X等国际研究早于国内。在国际研究中,DSRC、V2X分别在2014年和2016年出现,C-V2X、5G在2018年出现;在国内研究中,DSRC 出现在2012年,V2X、C-V2X出现在2019年,LTE-V2X、5G出现在2017年。V2X技术分为DSRC和C-V2X。C-V2X包含 LTE-V2X和5G-V2X。可见,国际研究较早开始V2X技术路线研究,并已进入广域无线通信技术领域;第四,国内有关大数据、云计算在信息通信中的应用研究早于国内,然而未形成高关注度方向。大数据在国际、国内研究中的出现时间分别为2018年和2014年,云计算的出现时间分别为2020年和2013年。至2020年,在国内研究中上述关键词的利用频次分别为11次和7次,国际研究中的出现频次为4次,国内研究热度未表现出显著优势。
在车车/车路控制方向,国际、国内的共同研究内容集中在交通信号控制、自适应巡航控制、交叉口冲突检测、车队控制等方面。其中,有关自动驾驶的研究出现在2015年前后。两者的不同点主要包括:第一,在国际研究中,有关此方向的研究占比更多,内容也更加丰富。从排名前50的高频关键词分布上看,在国际研究中特指该方向的关键词有12个,在国内研究中有7个。从研究主题聚类上看,国际研究所展现的内容更为具化。其中,路侧雷达、突发事件识别、主动/协同避撞、驾驶员行为分析等研究热度较高,而在国内研究中相对偏少;第二,国际在若干技术内容的研究上“抢占先机”。如国际、国内有关自适应巡航控制研究分别出现在2012年和2017年,路径/轨迹规划研究分别出现在2017年和2019年,车辆跟驰模型研究分别出现在2014年和2019年,车速控制研究分别出现在2016年和2018年等。由于国内研究起步较晚,这些技术内容尚未在国内研究中演变为技术热点;第三,国内先于国际开展电动汽车研究,然而研究热度不及国际。电动汽车在国际、国内研究中的出现时间分别为2018年和2016年。它在国际研究中出现的当年即成为突现词并延续至今,未来还可能受到持续关注。而在国内研究中,电动汽车在出现后似乎变得“销声匿迹”,至2020年该关键词的出现频次仅为7次。
在生态驾驶方向,国际研究中探讨的生态驾驶系统、能效优化控制等方面为国内空缺研究。
4 车路协同技术发展态势
从Derwent Innovation数据库中提取2011-2020年十年间车路协同领域专利信息,采用专利技术地图方法,对专利进行分析,揭示了车路协同研发的主要技术领域、技术热点与前沿、主要国家/地区和主要专利权人的专利布局等,提出该领域技术发展特征与趋势,
根据德温特手工代码,统计车路协同涉及的各技术主题各个年度的专利申请数量,利用Derwent Data Analyzer,绘制各技术方向专利数量随时间变化的趋势图,如图6所示。整体来看,车路协同涉及的各技术主题的专利数量随着时间的增长而增长,在2018-2019年期间达到高峰。其中,汽车微处理器系统(T01-J07D1)、无线电通信线路(W01-A06C4)等领域的专利增长幅度较大,无线电通信线路(T01-C03C)、防撞和停车辅助设备(X22-J05)等增长幅度较小,非车载车辆接口/通信(X22-K08)主题的专利数量在2017年左右出现了较明显的下降趋势。车路协同领域近3年来的技术研发集中在T01-J07D1(汽车微处理器系统)、W01-A06C4(无线电通信线路)、T01-J07D3A(地理信息系统)、T01-S03(软件产品)、X21-A01F(电动汽车)等主题。
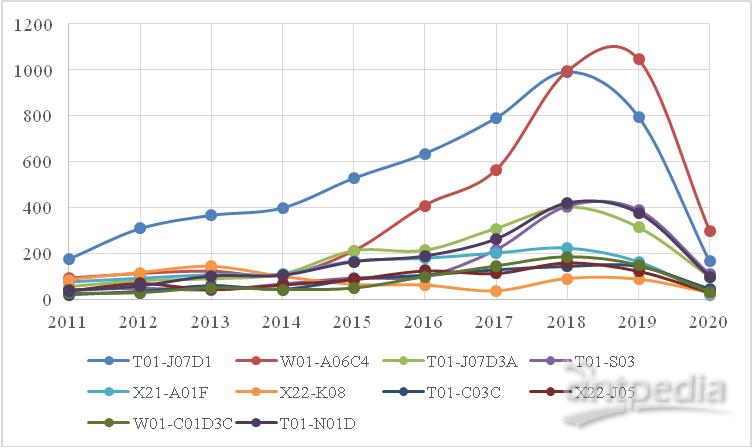
图 6 专利申请随时间变化趋势
提取专利文献题名和摘要中的关键词,采用词频 (Term Frequency, TF)-反文档频率 (Inverse Document Frequency, IDF)算法对关键词进行加权,选取高频关键词作为该专利的技术主题,并用等高线的形式呈现,绘制专利技术热点分布地图,如图7所示。图7显示,车路协同专利技术热点主要集中在以下方向:

图 7车路协同领域专利技术热点分布地图
(1)信息通信(图7蓝色区域):包括车辆间通信、车与外界的信息交互,包括侧行链路资源分配及使用、多址接入与分配、分组信号通信、车辆节点间的数据传输、信息安全认证与密钥生成等;
(2)车辆控制(图7粉色区域):包括碰撞风险预测、自动驾驶平台,有关道路交通信号、行车速度的控制与决策等;
(3)导航与定位(图7橘色区域),即全球卫星导航;
(4)能源供应(图7绿色区域):包括新能源汽车充电等电力供应,以及电磁阀、燃气阀等能源供应技术与设备;
(5)车载感知(图7白色区域):包括图像识别技术、总线控制技术、传感器信息交互技术、车载终端数据传输系统,以及车载电源供应、自动泊车、车载移动电话等车辆定位功能。
在上述技术热点中,信道资源分配及使用、网络信息传输服务、车载电源供应、新能源汽车电力供应、智能交通控制与决策系统为专利密集程度较高的区域,专利权人在这些领域进行了专利布局。
对代表专利技术主题的高频关键词进行共现分析并聚类,绘制专利技术热点聚类图谱,如图8所示。技术热点包括:
(1)V2X通信网络(图8蓝色区域):包括无线电通信系统(Radio Communication System)、正交频分多址系统(Orthogonal FDMA)及其系统子框架(Sub Frame)结构,以及长期演进(Long Term Evolution/LTE Advanced)、Wi-Fi等通信技术;
(2)V2X数据传输方法(图8绿色区域):路侧基站(Base Station)、用户设备(User equipment)、车载终端(Terminal)等实体间的通信方法,包括侧行链路通信(Sidelink Communication)、D2D通信(D2D Communication)、资源分配(Resource Allocation)、资源池(Resource Pool)、无线资源控制(Radio Resource Control)等;
(3)V2X通信装置(图8黄色区域):V2X硬件设备,包括无线网络装置(Wireless Apparatus)、路侧基站装置(Base Station Apparatus)、分组信号装置(Packet Signal)等;
(4)车辆感知与控制方法(图8红色区域):围绕云平台(Cloud)、通信单元(Communication Unit)、传感器装置(Sensor)、方块图(Block Diagram)的网联汽车(connected vehicle)数据采集、处理与车辆控制系统;围绕组成单元(Unit)、模块(Module)、路线(Route)、驾驶员操作(Driver)的自动驾驶汽车(Autonomous Vehicle/ego vehicle)控制系统;电动汽车(Electric Vehicle)的控制器(Controller)和模块(Module)设计;以及通过传感器(Sensor)、照相机(Camera)、天线(Antenna)等装置及其框架(Frame)结构(Structure)、模块(Module)、各类单元(Unit)(含采集单元(Acquisition Unit)、检测单元(Detection Unit)、处理单元(Processing Unit)、决策单元(Determination Unit)等)、方块图(Block Diagram)等设计,实现车辆位置(Position)通信、车辆速度(Speed)控制、辅助驾驶(Assistance System)、车辆变道(Lane Change)规划、交叉口(Intersection)信号控制等车载端功能与交通管理。
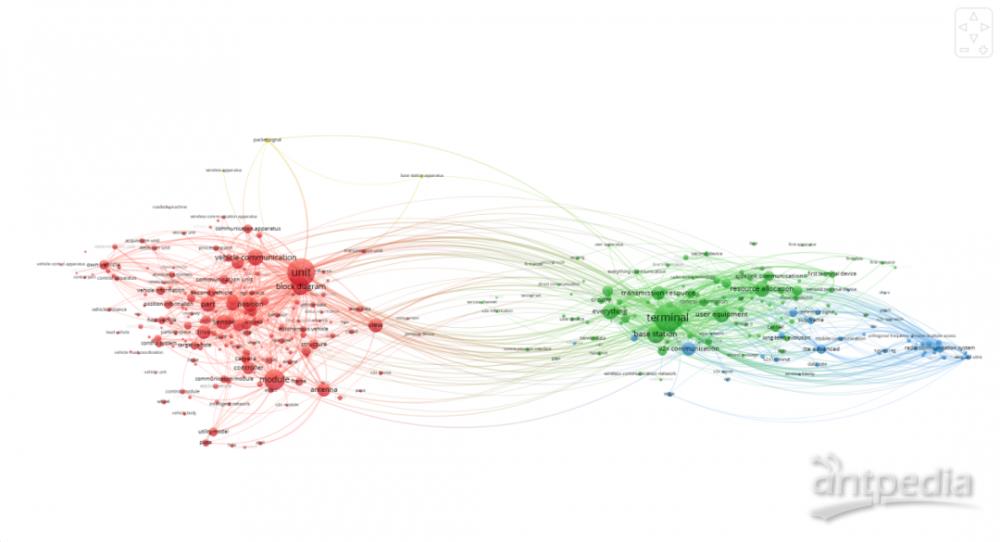
图 8车路协同领域专利技术热点聚类图谱
在专利技术热点分布地图的基础上,标注专利权人所在国家/地区,绘制主要国家/地区专利布局地图,如图9所示。图9显示,中国在车路协同领域研发范围广,几乎遍布所有技术方向,尤其在车载感知、能源供应、车辆控制方向专利密集程度较高。美国在车路协同领域技术研发主要集中在信息通信和车辆控制方向。其中,信息通信是其布局最为集中的区域。而中国在该方向的专利数量非常少。日本在车辆控制方向有较为集中的专利布局。此外,日本在信息通信领域的V2V传输方向、车载感知领域的车载终端数据传输系统方向也申请了专利。韩国除能源供应方向外,在其他方向均布局有专利。韩国在各方向上的研究主要集中在个别技术热点上,如信息通信方向的无线网络服务、车辆控制方向的碰撞风险预测等。德国的研发重点包括车辆控制中有关道路交通信号、行车速度的控制与决策技术,车载感知中传感器信息交互技术等。
注:红色代表中国;绿色代表美国;黄的代表日本;蓝色代表韩国;深蓝代表德国。
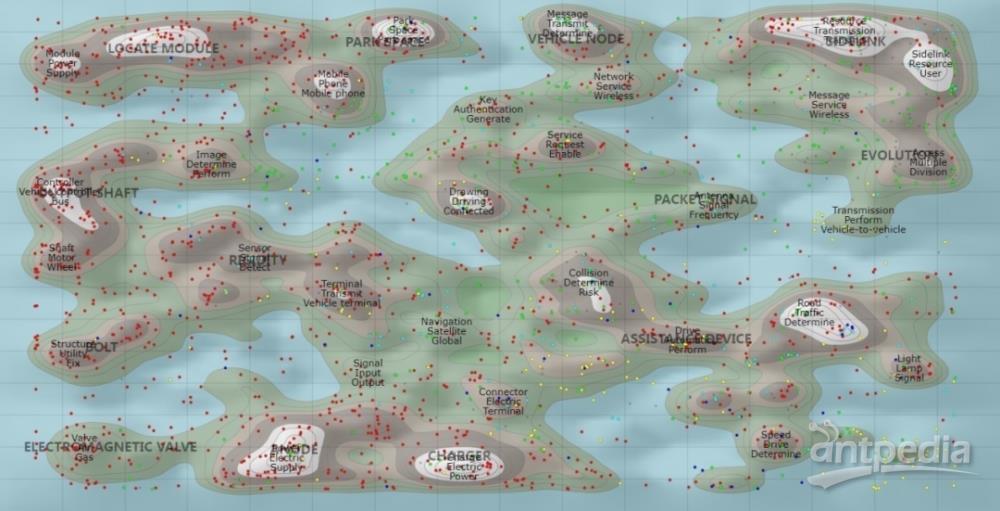
图 9主要国家/地区专利布局
将排名前10位的专利技术主题与主要专利权人进行交叉分析,绘制主要专利权人技术主题分布图谱,如图10所示。图10所示为是专利权人开展技术研发的主要技术主题。LG电子、华为、高通和三星电子的技术研发主要集中在W01-A06C4(无线电通信线路)主题。上述4家企业在该主题的专利申请数量比排名第二位的主题多50%以上。福特、丰田和戴姆勒的主要技术研发主题为T01-J07D1(汽车微处理器系统),其中福特在该方向的专利申请数量在主要专利权人中排名第一。在T01-S03(软件产品)方向,高通和华为专利申请量较多;在W01-C01D3C(便携式;手持)方向,LG电子、高通、华为和三星电子专题申请量较多。
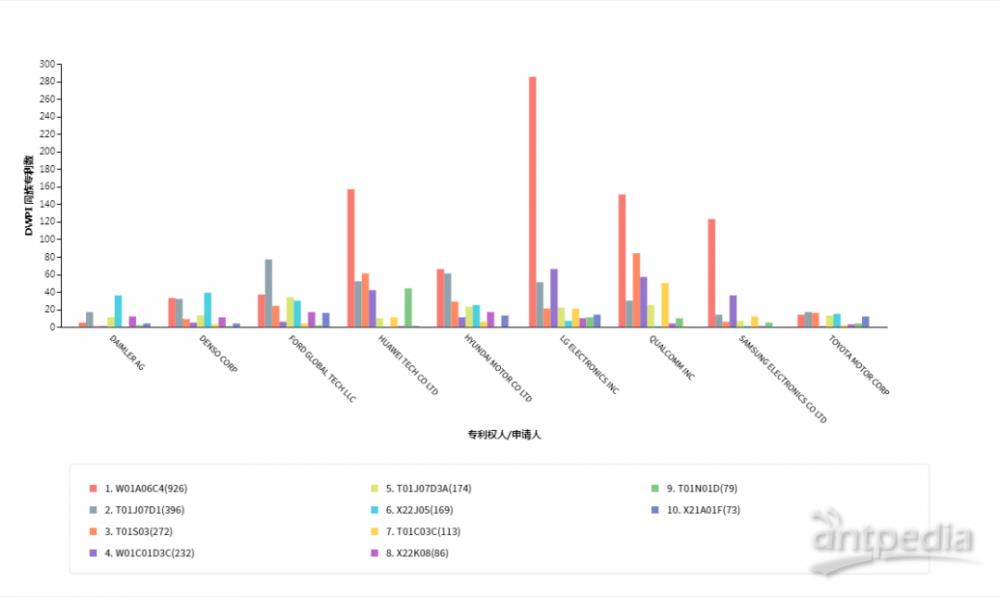
图 10 主要专利权人技术主题分布图
近年来,中国高度重视自动驾驶、智能网联汽车的发展,将其视为汽车产业升级的必备条件。2015年以来,由国务院协调,国家发改委、交通运输部、工业和信息化部密集出台了一系列推动车路协同和智慧交通发展的政策文件,在技术创新、标准规范、示范应用、产业培育、应用推广等各个环节,开展有目的、有计划的产学研用联动,为车路协同技术发展和服务创新提供必要的环境条件。北京、上海、广州、重庆等地区也出台了推进车路协同在地方落地的一系列政策措施。表中所示为中国出台的国家和行业层面推进车路协同发展的主要政策文件。
5 车路协同技术与产业发展分析
通过对车路协同相关政策、研究文献、专利技术、应用示范等的分析,形成车路协同在关键技术和方法研究、技术产品研发、产业化等方面发展特征、趋势等结论,主要包括:
- 多因素推动车路协同快速发展
2018年车路协同文献和专利数量激增,技术的研究应用进入加速发展期。政策、技术、市场先进多方面因素共同推动了车路协同技术的快速发展。
(1)政策推动力度强劲
国内方面,2018年2月交通运输部启动九省市智慧公路试点,促进了路运一体化车路协同、车路协同安全辅助服务、面向城市公共交通及复杂交通环境的车路协同技术应用发展。4月,国家发展改革委、财政部下发了降低部分无线电频率占用费标准的通知文件,进一步激发市场需求。11月,工业和信息化部发文支持LTE-V2X技术在智能网汽车的应用和发展,开启了车路协同探索的新篇章。12月,工业和信息化部发布《车联网(智能网联汽车)产业发展行动计划》,明确了形成深度融合、创新活跃、安全可信、竞争力强的车联网产业新生态的发展目标。国际方面,2018年5月美国交通部在俄明州、纽约、佛罗里达州三地部署的车联网发展试点项目(Connected Vehicle Pilot Deployment Program)完成第二阶段设计/建造/测试,将前期构想落地实施。10月,美国交通运输部发布了《自动驾驶汽车3.0:为未来交通做准备》,支持将自动驾驶的安全、高效、可靠、经济集成到多联式跨界的地面运输系统中。2018年,主要国家都出台颁布了具有总领性、鼓励性的政策和措施,激发了技术研发应用的活力。
(2)基础性技术准备就绪
2018年,3GPP全会(TSG#80)批准了第五代移动通信技术标准(5G NR)独立组网功能冻结,5G完成第一阶段全功能标准化工作,进入了产业全面冲刺新阶段。DSRC标准组织IEEE提出IEEE 802.11 NGV,作为DSRC后续演进版本,提升范围和可靠性,并且对DSRC具备兼容能力。中国第一条5G自动驾驶车辆测试道路、5G自动驾驶联盟成立及领先计划、中国移动“和路通”智能ETC的重磅发布,开启了5G车联网应用的序幕。韩国自动驾驶汽车技术研发支持及安全性测试试验平台K-City竣工并开放,建设和运营了自动驾驶数据中心。国际层面通信技术标准确立,主要国家进一步完善车路协同的基础设施。
(3)市场供给能力升级
2018年,国内2018年自动驾驶零部件和方案供应商融资额由2017年的53.69亿元上升到162.31亿元[15]。在5GAA会议上,福特公司发布了与大唐、高通联合开展的DSRC和LTE-V2X实际道路测试性能测试结果。2018世界移动大会“车联网产业生态峰会”上,中国移动、上汽集团宣布车联网战略规划,华为发布最新的C-V2X解决方案[16]。主要企业纷纷发力,推出车路协同产品方案。
- 车路协同研究处于发展初期
从全球车路协同领域研究情况来看,2011年以前,该领域研究处于孕育阶段,主要围绕通信技术和单车智能展开。2012年至2016年,该领域研究处于起步阶段,研究内容从单车智能跨入V2X,围绕路侧系统的研究增多,这阶段产生了一些高质量研究成果,在前10位的高被引论文中,有7篇是发表于此阶段。2017年起,车路协同领域的研究呈爆发性增长,车路协同研究进入发展时期,研究内容逐步从智能感知扩展到智能控制、智能决策,应用和实证方面的研究逐步增多。目前,车路协同研究涵盖通信系统、路侧系统、车载系统和交通管理系统,研究处于发展初期。
- 车路协同领域技术研发主要集中于产业链的中上游
车路协同领域的研发技术主题包括汽车微处理器系统、无线电通信线路、地理信息系统、软件产品、电动汽车等。其中,汽车微处理器系统、无线电通信线路、地理信息系统是车路协同领域排名前三位的专利技术主题分类,也是近3年来专利申请的热点。
信息通信、车辆控制、导航与定位、能源供应方及车载感知等技术热点方向均形成了较成熟的专利集群,信道资源分配及使用、网络信息传输服务、车载电源供应、新能源汽车电力供应、智能交通控制与决策系统等为专利密集程度较高的区域。车路协同领域研发的技术热点集中在通信与车端,路侧端的专利布局较少。
- 技术研发主体主要包括信息与通信企业、汽车及零部件生产商和计算机及软件制造商
信息与通信企业的研发集中在信息通信和车辆控制方向,负责车路协同通信所需的IT基础设施建设,包括通信芯片组、传感器、车载单元、路侧单元等,以及提供专用通信网络。代表企业包括LG电子公司、高通公司、三星电子公司、华为技术公司、中兴通讯公司、中国电信集团公司等。
汽车及零部件生产商的研发集中在汽车微处理器系统、车辆控制、导航与定位方向,致力于支持基于V2X/C-V2X技术的汽车开发及无人驾驶技术开发。代表企业包括丰田自动车株式会社、福特公司、电装公司、现代汽车公司、奇瑞汽车公司、郑州宇通客车股份有限公司等。
计算机及软件制造商亦开展信息通信方向研发,提供通信芯片产品,代表企业为英特尔公司等。
此外,参与车路协同领域研发的专利权人还包括高校,高校较为集中的参与技术研发是中国的突出特点。高校的研发方向与以企业为主体的全球专利权人相比,未形成专利高地。
- 美国、中国等市场受到普遍关注
LG电子公司、华为技术公司、福特公司等主要专利权人优先选择在美国、中国和世界知识产权组织进行专利布局。这些国家(地区)对车路协同领域高度重视,是受到较多关注的市场。美国和中国市场是创新力量致力争夺的焦点,创新力量看好其未来市场潜力。
- 车路协同是适合中国国情的自动驾驶技术发展路径
车路协同系统主要由具备智能网联车辆、具备交互能力的智能路侧和面向泛在服务的大数据平台等部分构成。通过关键词聚类可以看出,该领域研究涵盖通信系统、路侧系统、车载系统和交通管理系统,涉及自动驾驶汽车/智能网联汽车、新能源汽车。我国主要开展基于DSRC/LTE-V的车车/车路网技术(包含车车通信,车路通信,车联网/车载网数据传输和隐私保护、广播协议和安全通信、路由协议和路由算法、移动边缘计算和资源分配策略、网络吞吐量和通信延迟等方向)和车车/车路控制技术(包含车辆协作控制及智能网联汽车、交通控制方向)研究。由于我国人口密度大、交通环境复杂多样,依靠单车智能实现自动驾驶难度大,但在5G等基础设施建设方面具有先天优势,车路协同成为适合中国国情的自动驾驶技术发展路径。
以上是关于知领·报告 | 车路协同技术发展态势分析报告.md的主要内容,如果未能解决你的问题,请参考以下文章
权威机构预测:到2035年以车路协同为基础的自动驾驶基本普及