人工智能导论期末复习合集
Posted 显然易证
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了人工智能导论期末复习合集相关的知识,希望对你有一定的参考价值。
人工智能导论期末复习合集
AI导论知识点目录
〇、绪论
重点:人工智能定义、人工智能研究内容(了解、理解即可)
一、知识的概念
重点:知识的概念、知识的表示
知识是人们在长期的生活及社会实践中、在科学研究及实验中积累起来的对客观世界的认识与经验。
知识的形式:事实、因果关联
知识的特性:相对正确性(明确前提)、不确定性(真假之外)、可表示性(形式描述)、可利用性(学以致用)
练习题
- 知识的概念

二、基本搜索
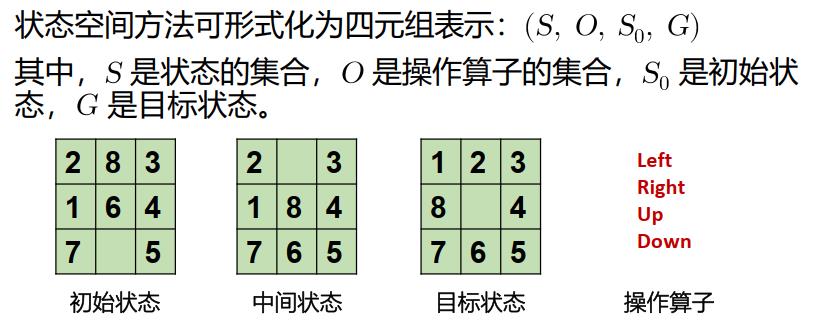
2.1 状态空间法
· 状态:表示问题解法中每一步问题状况的数据结构
· 操作:状态变换的手段
· 状态空间:表示问题全部可能状态及其关系的图
· 状态空间的解:从初始状态到目标状态的操作算子序列
2.2 无信息搜索
只按预定的控制策略进行搜索,在搜索过程中获得的中间信息不会用来改进控制策略。
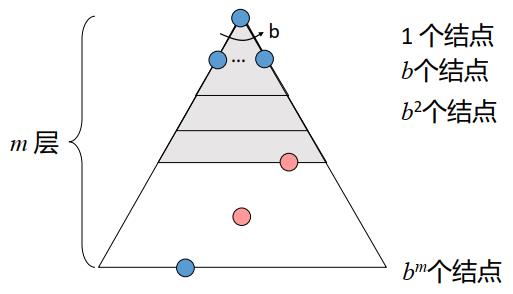
每个节点的分支数为b,最浅解位于第s层,搜索空间共m层。
2.2.1 宽度优先搜索【队列】
时间复杂度:O( b s b^s bs)
空间复杂度:O( b s b^s bs)
具有完备性、最优性
2.2.2 深度优先搜索【栈】

时间复杂度:O( b m b^m bm)
空间复杂度:O( b m bm bm)
可能不具有完备性(图有环时需进行约束)、不具有最优性(最左的解)
2.2.3 一致代价搜索【优先队列】
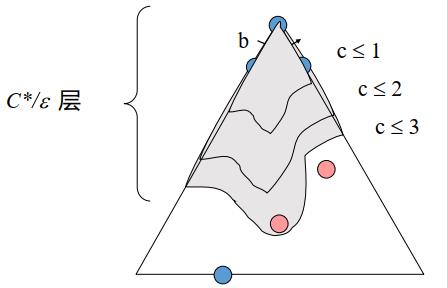
解代价为
C
∗
C^*
C∗,边最小代价为
ε
ε
ε
时间复杂度:O( b C ∗ / ε b^C^*/ε bC∗/ε)
空间复杂度:O( b C ∗ / ε b^C^*/ε bC∗/ε)
具有完备性、最优性
练习题
- 一致代价搜索的终止条件:
- 无信息搜索
2.3 启发式搜索
在搜索中加入了与问题有关的启发性信息,用于指导搜索朝着最有希望的方向进行,加速问题的求解过程并找到最优解。
2.3.1 贪婪搜索【优先队列】
搜索策略: 拓展看起来离目标最近的节点
评估函数:
f
(
n
)
=
h
(
n
)
f(n)=h(n)
f(n)=h(n)【
h
(
n
)
h(n)
h(n)表示从
n
n
n节点到目标节点最佳路径的估计代价】
最坏情况下退化为DFS,时间复杂度为O( b m b^m bm)
空间复杂度:O( b m b^m bm)【存储所有节点的信息】
不具有完备性和最优性
2.3.2 A*搜索【优先队列】
搜索策略: 避免拓展耗费已经很大的路径
评估函数:
f
(
n
)
=
g
(
n
)
+
h
(
n
)
f(n)=g(n)+h(n)
f(n)=g(n)+h(n)【g(n)表示初始节点到n节点的实际代价、h(n)表示估计代价】
- 可纳性
如果对任意节点 𝑛 𝑛 n, h ( n ) ≤ h ∗ ( n ) h(n)≤h^*(n) h(n)≤h∗(n)成立, 则启发式函数是可纳的(admissible), 其中, h ∗ ( n ) h^*(n) h∗(n)是结点 𝑛 𝑛 n到目标状态的真实代价。
定理:若 h ( n ) h(n) h(n)可纳,则A*搜索算法具有最优性。
- 一致性(一致->可纳)
若对于任意节点 n n n和通过操作 a a a生成的后续节点 n ′ n' n′,则 h ( n ) ≤ c o s t ( n , a , n ′ ) + h ( n ′ ) h(n)≤cost(n,a,n')+h(n') h(n)≤cost(n,a,n′)+h(n′)成立,则启发式函数是一致的
定理:若 h ( n ) h(n) h(n)一致,则A*搜索算法具有最优性。
-
优势性
对于任意节点 n n n,可纳启发式函数 h 1 ( n ) < h 2 ( n ) h_1(n)<h_2(n) h1(n)<h2(n) ,称 h 2 h_2 h2优于 h 1 h_1 h1 -
最优性
假设A是最优目标节点,B是次优节点,则A比B更早被搜索。

-
A*算法性能分析
b b b表示每个节点的后继节点数, d d d表示解的深度, ε ε ε表示相对误差 h ∗ − h h ∗ \\frach^*-hh^* h∗h∗−h , h ∗ h^* h∗为真实代价, h h h为估计代价
最坏时间复杂度:O( b ε d b^εd bεd)
空间复杂度:O( b m b^m bm) -存储所有节点的信息
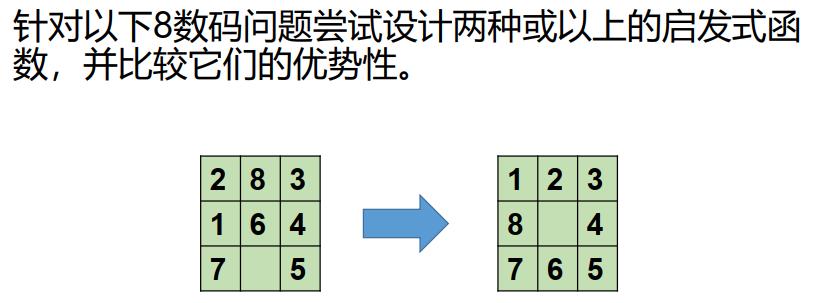
启发式函数设计
- 问题松弛化
八数码问题:棋子可以从方格A->方格B,如果A与B水平或竖直相邻且B为空。
去掉相关条件,形成松弛问题:
A与B相邻,棋子可从A移到B(距离)
如果B空,棋子可从A移动B
棋子可从A移动到B(不在位)
-
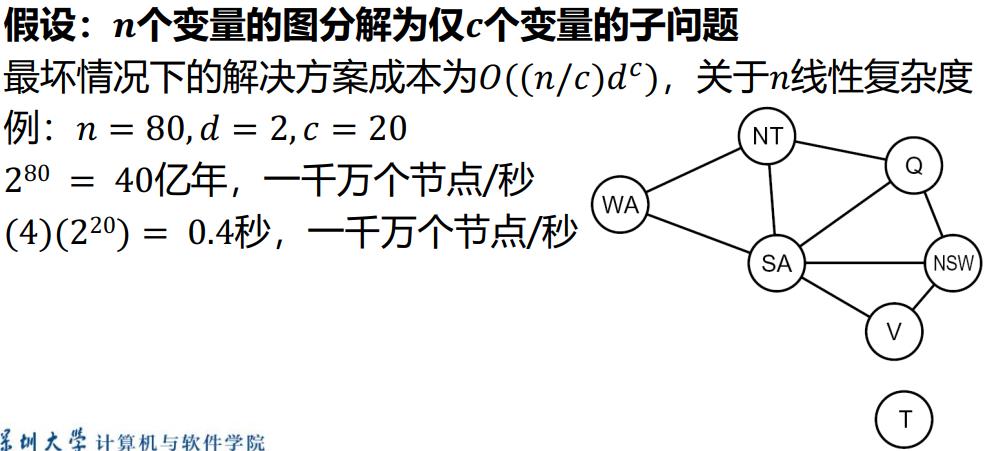
子问题分解
原问题分解为多个子问题,考虑子问题的解代价。 -
模式数据库
存储子问题模式解代价,从目标反向搜索计算模式代价,针对子问题,查找模式数据库。 -
从经验中学习
总结
- A * 算法综合了后向路径代价和前向估计代价;
- 如果启发式函数可纳/一致, A*是最优的;
- 启发式函数设计是关键,应选具有优势的启发式函数。
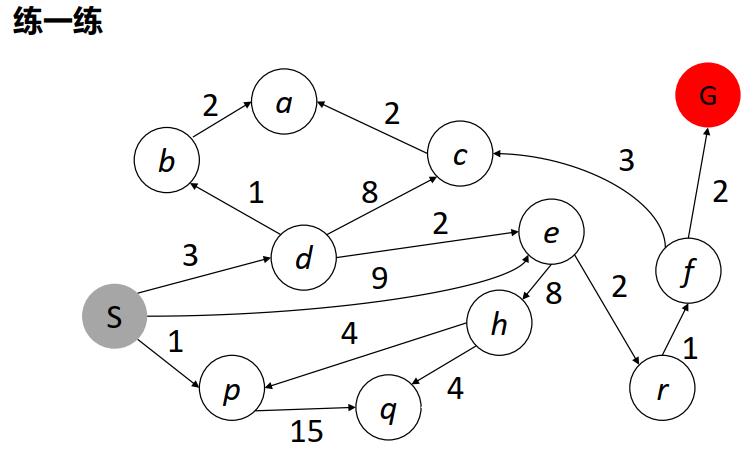
练习题
- A*搜索

- 修道士问题(M-C问题)

- 各种搜索算法的搜索过程

三、约束满足问题
3.1 回溯法
以N皇后问题为例,从初始状态开始,按行逐一摆放皇后,遇到矛盾时返回上一状态,重新摆放皇后。
由此,搜索空间是一棵搜索树,直至搜索至第N层即可找到可行解。
回溯搜素 = DFS + 变量分配【每次一个变量】 + 约束检查【考虑与前面分配不冲突的变量值】
具有完备性
具有最优性
时间复杂度:O(N!)
空间复杂度:O(N)
3.2 排序策略
3.2.1 最少可取值
(对节点排序,每次选择值域最少可取值的变量)
3.2.2 度启发式
(对节点排序,每次选择度最大的变量)
3.2.3 最少约束值
(对颜色排序,选择给近邻变量留下更多选择的值)
3.3 推理策略
3.3.1 约束传播-局部相容性
- 节点相容(单个变量值域的所有取值满足其一元约束)
- 边相容(满足所有的二元约束)
- 若X去除某个值,X的近邻需要再次检查,边相容比前向检查更早检测出错误
- 路径相容(通过观察变量得到隐式约束来加强二元约束)
- …k阶相容
- 强k阶相容(k-1,k-2,…,1也相容,无需回溯就可求解问题)
3.3.2 智能回溯
- 搜索失败时返回前一个变量,尝试另一个值,回溯到哪个变量?

3.3.3 前向检查
3.4 问题结构特性
极端情况:大问题由独立子问题构成,独立子问题可认为是约束图的连接组件(连通子图)
3.4.1 树状约束满足问题-图转树
-
变量(拓扑排序):
选择一个根变量,对变量进行排序,先父母后孩子。
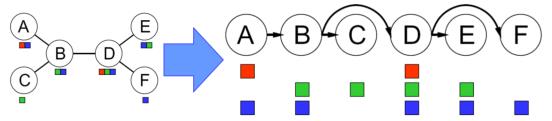
两变量最多有一条路径,所以n个结点的树有n-1条边。 -
边相容:
应用Remove Inconsistent(Parent( X i X_i Xi), X i X_i Xi) -
变量分配:
对于 i = 1 : n i = 1:n i=1:n,相容地分配 X i X_i Xi


练习题

3.5 局部搜索
优点
- 通常只用常熟级的内存
- 通常能在标准约束满足算法不适用的很大或无限的(连续的)状态空间中找到合理的解
- 对于解决纯粹的最优化问题十分有用,其目标是根据目标函数找到最佳状态
- 如果存在解, 最优的局部搜索算法可找到全局最大/最小值
CSP局部搜索
- 初始变量分配违反一些约束
- 重新分配变量值
基本思想
变量选择:随机选择任何有冲突的变量
值选择:最小冲突启发式
- 选择一个违反最少约束的值
- 爬山法——启发式信息h(n)=违反约束的总数
- 其他局部搜索方法:模拟退火、局部束搜索
3.5.1 爬山法
从任意初始状态开始,每次移动到最好的近邻状态,若无近邻状态比当前更好,则退出循环,得到爬山法的解。
- 不具有完备性
- 不具有最优性
- 时间复杂度较低
- 空间复杂度:O(N)
- 可从任意地方开始
- 重复:移动到最好的近邻状态
- 若无近邻状态比当前更好,则退出

无最优性的概念,不具有完备性。
特点:速度快,但易于陷入局部最优。
改进爬山法
- 随机爬山法:概率随机选择下一步,可能找到更好的解
- 首选爬山法:随机直至选到优于当前的结点,后继多时较好
- 随机重启爬山法:多次尝试,算法完备性的概率接近1
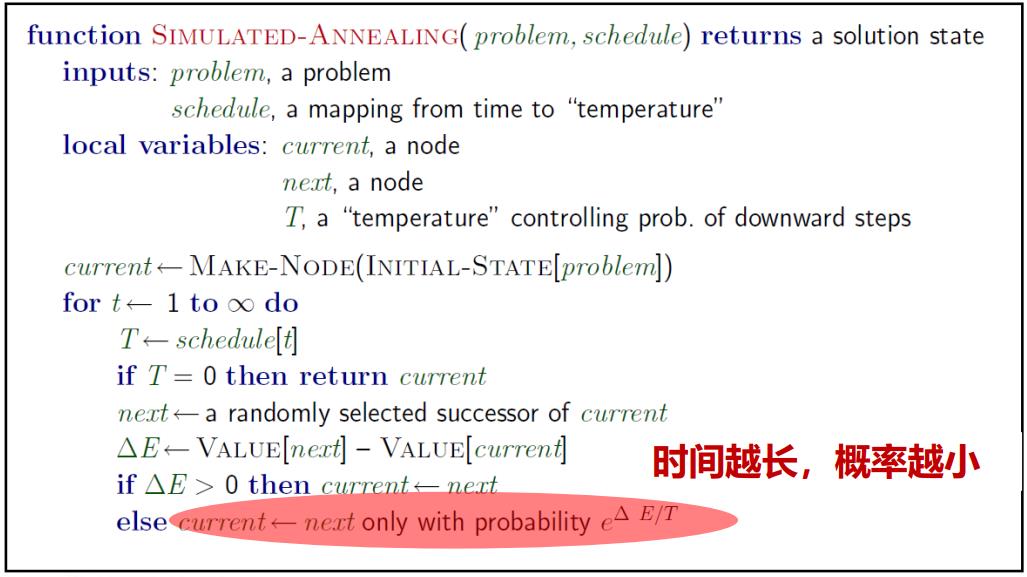
3.5.2 模拟退火
在爬山法的基础之上,允许“下山”动作跳出局部最优解,从而能有更大概率找到全局最优解。
- 不具有完备性
- 具有最优性
- 时间复杂度比爬山法高
- 空间复杂度:O(N)
3.5.3 局部束搜索
从k个随机生成的状态开始,每一步全部k个状态的所有后继被生成。如果其中有一个是目标状态,则算法停止;否则从整个所有后继列表中选择k个最佳后继,重复直至达到目标状态。
- 不具有完备性
- 不具有最优性
- 时间复杂度比爬山法高
- 空间复杂度:O(N)
(随机)束搜索:
在所有后继列表中随机选择k个后继,其中选中概率是状态值的递增函数,类似于自然选择。
3.5.4 遗传算法
遗传是随机束搜索的一个变形。把两个父状态结合(选择、交叉、变异)来生长后继,而不是通过修改单一状态进行。
- 具有完备性
- 具有最优性
- 时间复杂度比爬山法高
- 空间复杂度:O(N)
练习题
-
回溯算法优化方法有哪些,其主要思想是什么,可以带来哪些好处?
-
编程实现N皇后回溯搜索算法,至少采用一种优化策略加速搜索过程。
-
实现N皇后至少一种局部搜索方法,并分析其算法的性能(四个搜索算法评价指标)。
四、对抗搜索
4.1 Minimax
搜索:自顶向下
计算:自底向上
搜索方法:类似DFS
时间复杂度:O(
b
m
b^m
bm)
空间复杂度:O(
b
m
bm
bm)
面临问题:搜索空间巨大
4.2 Alpha-Beta剪枝
一种找到最佳minimax步骤的方法,同时可以避免搜索不可能被选择的步骤的子树。
Alpha:可能步骤的最大下界
Beta:可能步骤的最小上界
任何新节点被认为是可能路径节点 当且仅当
α
≤
V
a
l
u
e
(
N
)
≤
β
α≤Value(N)≤β
α≤Value(N)≤β
剪枝性质:
- 剪枝不影响根节点Minimax值
- 中间节点值可能不同
- 子节点的次序影响剪枝效率
- 最好时间复杂度:O( b m / 2 b^m/2 bm/2)


