OpenCV 边缘检测之Sobel算子
Posted 流楚丶格念
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 边缘检测之Sobel算子相关的知识,希望对你有一定的参考价值。
文章目录
Sobel算子(索贝尔算子)
Sobel算子定义:
Sobel 算子是一个离散的一阶微分算子,用来计算图像灰度函数的近似梯度。
在空间域上Sobel算子很容易实现,执行速度快,对部分噪声具有平滑作用,还能够提供较为精确的边缘方向信息,缺点是边缘定位精度不够高。边缘是指一个物体与另一个物体的分界处,一般边缘内外处都会有灰度值上的差异,Sobel算子就是通过像素点空间邻域内上下,左右相邻点的灰度加权运算,求取物体边缘。
Sobel算子作用:
索贝尔算子是计算机视觉领域的一种重要处理方法。主要用于获得数字图像的一阶梯度,常见的应用和物理意义是边缘检测。索贝尔算子是把图像中每个像素的上下左右四领域的灰度值加权差,在边缘处达到极值从而检测边缘。
索贝尔算子主要用作边缘检测。在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。
索贝尔算子不但产生较好的检测效果,而且对噪声具有平滑抑制作用,但是得到的边缘较粗,且可能出现伪边缘。
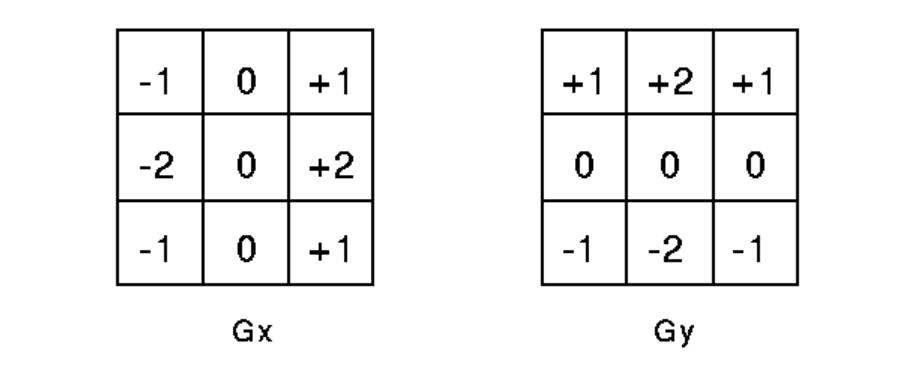
Sobel卷积因子
经典Sobel的卷积因子为:
Sobel卷积计算公式:
对于待检测边缘的图像I,分别在水平(X)方向和垂直方向(Y)方向求导,方法是分别图像I与卷积核Gx和Gy进行卷积,公式表述如下:

图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小(G即为Sobel求得的梯度图像)。

(或者用下面简单粗暴的方法计算G
 )
)
然后可用以下公式计算梯度方向。

在以上例子中,如果以上的角度θ等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
相关API
Sobel()
函数功能:
- 应用于图像边缘检测
函数原型:
dst = cv2.Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]])
必选参数(前四个是必须的参数):
src- 需要处理的图像ddepth- 图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度dx- 对x轴方向求导的阶数,一般为0、1、2,其中0表示这个方向上没有求导dy- 对y轴方向求导的阶数,一般为0、1、2,其中0表示这个方向上没有求导
其后是可选的参数:
dst- 目标图像ksize- Sobel算子的大小,必须为1、3、5、7scale- 缩放导数的比例常数,默认情况下没有伸缩系数delta- 可选增量, 将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中borderType- 图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT
说明:
在经过处理后,需要用convertScaleAbs()函数将其转回原来的uint8形式,否则将无法显示图像,而只是一副灰色的窗口。
convertScaleAbs()
函数功能:
- 实现将原图片转换为
uint8类型
函数原型:
dst = cv2.convertScaleAbs(src[, dst[, alpha[, beta]]])
参数:
src- 源图像dst- 输出图像
可选参数
alpha是伸缩系数beta是加到结果上的一个值,结果返回uint8类型的图片
例如下面用法,转化XY方向:
absX=cv2.convertScaleAbs(x) # 转回uint8
absY=cv2.convertScaleAbs(y)
addWeighted()
由于Sobel算子是在两个方向计算的,最后还需要用cv2.addWeighted(…)函数将其组合起来
函数功能:
- 实现以不同的权重将两幅图片叠加,对于不同的权重,叠加后的图像会有不同的透明度
函数原型为:
dst = cv2.addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]])
参数:
src1- 第一张图片alpha- 是第一幅图片中元素的权重src2- 第二张图片beta- 是第二幅图片中元素的权重gamma- 是加到最后结果上的一个值
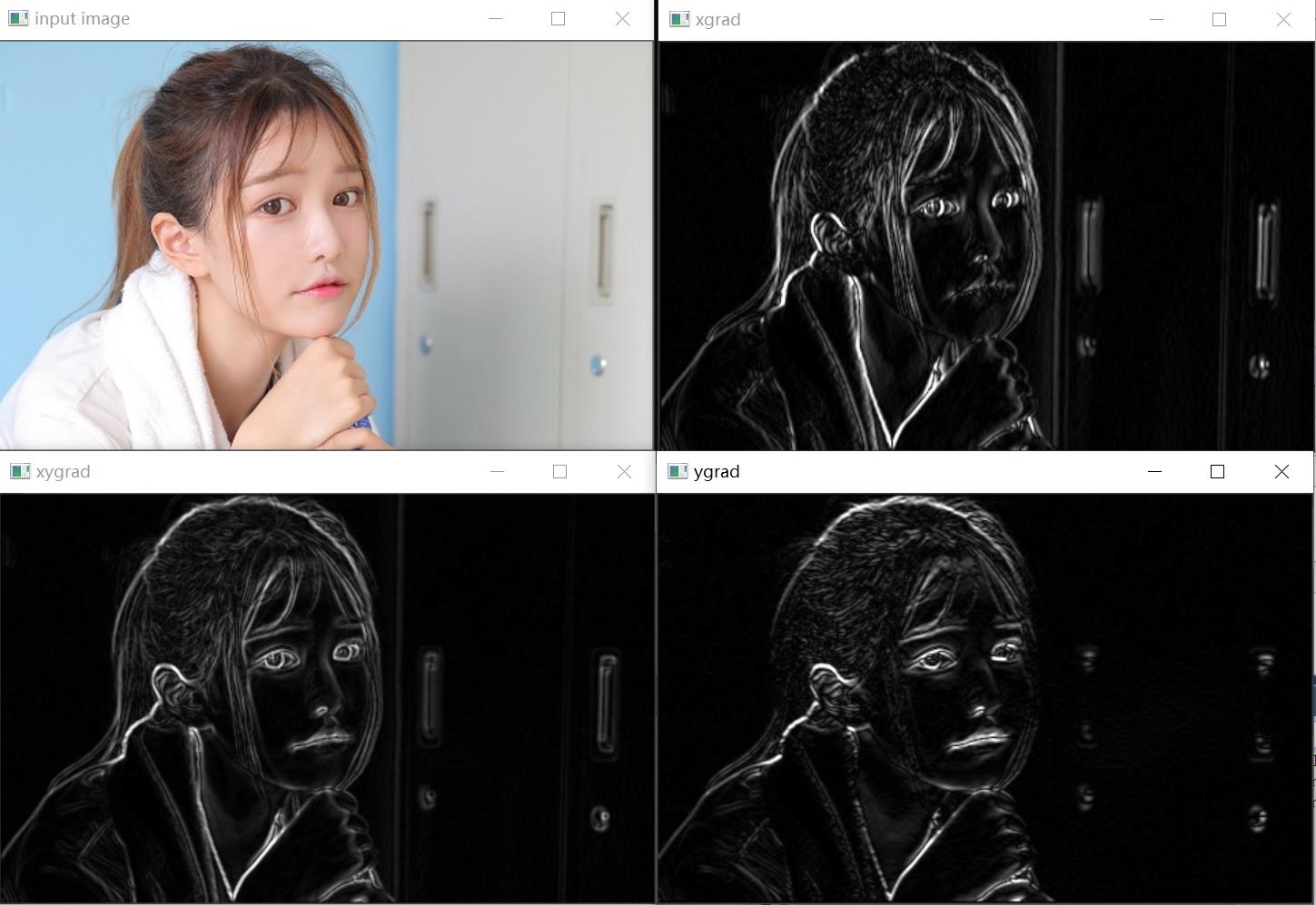
代码案例
用API
#include <iostream>
#include <math.h>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/highgui/highgui_c.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
Mat src, dst;
src = imread("./test2.jpg");
if (!src.data)
printf("could not load image...\\n");
return -1;
char INPUT_TITLE[] = "input image";
char OUTPUT_TITLE[] = "sobel-demo";
namedWindow(INPUT_TITLE, CV_WINDOW_AUTOSIZE);
// namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);
imshow(INPUT_TITLE, src);
Mat gray_src;
GaussianBlur(src, dst, Size(3, 3), 0, 0);
cvtColor(dst, gray_src, CV_BGR2GRAY);
// imshow("gray image", gray_src);
Mat xgrad, ygrad;
// Scharr(gray_src, xgrad, CV_16S, 1, 0);
// Scharr(gray_src, ygrad, CV_16S, 0, 1);
Sobel(gray_src, xgrad, CV_16S, 1, 0, 3);
Sobel(gray_src, ygrad, CV_16S, 0, 1, 3);
convertScaleAbs(xgrad, xgrad);
convertScaleAbs(ygrad, ygrad);
imshow("xgrad", xgrad);
imshow("ygrad", ygrad);
Mat xygrad = Mat(xgrad.size(), xgrad.type());
printf("type : %d\\n", xgrad.type());
int width = xgrad.cols;
int height = ygrad.rows;
for (int row = 0; row < height; row++)
for (int col = 0; col < width; col++)
int xg = xgrad.at<uchar>(row, col);
int yg = ygrad.at<uchar>(row, col);
int xy = xg + yg;
xygrad.at<uchar>(row, col) = saturate_cast<uchar>(xy);
addWeighted(xgrad, 0.5, ygrad, 0.5, 0, xygrad);
imshow("xygrad", xygrad);
waitKey(0);
return 0;
一大神自己写的

#include <iostream>
#include <math.h>
#include <opencv2/opencv.hpp>
#include<opencv2/highgui.hpp>
#include <opencv2/highgui/highgui_c.h>
using namespace cv;
using namespace std;
int main()
Mat m_img = imread("./test2.jpg");
Mat src(m_img.rows, m_img.cols, CV_8UC1, Scalar(0));
cvtColor(m_img, src, CV_RGB2GRAY);
Mat dstImage(src.rows, src.cols, CV_8UC1, Scalar(0));
for (int i = 1; i < src.rows - 1; i++)
for (int j = 1; j < src.cols - 1; j++)
dstImage.data[i*dstImage.step + j] = sqrt((src.data[(i - 1)*src.step + j + 1]
+ 2 * src.data[i*src.step + j + 1]
+ src.data[(i + 1)*src.step + j + 1]
- src.data[(i - 1)*src.step + j - 1] - 2 * src.data[i*src.step + j - 1]
- src.data[(i + 1)*src.step + j - 1])*(src.data[(i - 1)*src.step + j + 1]
+ 2 * src.data[i*src.step + j + 1] + src.data[(i + 1)*src.step + j + 1]
- src.data[(i - 1)*src.step + j - 1] - 2 * src.data[i*src.step + j - 1]
- src.data[(i + 1)*src.step + j - 1]) + (src.data[(i - 1)*src.step + j - 1] + 2 * src.data[(i - 1)*src.step + j]
+ src.data[(i - 1)*src.step + j + 1] - src.data[(i + 1)*src.step + j - 1]
- 2 * src.data[(i + 1)*src.step + j]
- src.data[(i + 1)*src.step + j + 1])* (src.data[(i - 1)*src.step + j - 1] + 2 * src.data[(i - 1)*src.step + j]
+ src.data[(i - 1)*src.step + j + 1] - src.data[(i + 1)*src.step + j - 1]
- 2 * src.data[(i + 1)*src.step + j]
- src.data[(i + 1)*src.step + j + 1]));
Mat grad_y(src.rows, src.cols, CV_8UC1, Scalar(0));
for (int i = 1; i < src.rows - 1; i++)
for (int j = 1; j < src.cols - 1; j++)
grad_y.data[i*grad_y.step + j] = abs((src.data[(i - 1)*src.step + j + 1]
+ 2 * src.data[i*src.step + j + 1]
+ src.data[(i + 1)*src.step + j + 1]
- src.data[(i - 1)*src.step + j - 1] - 2 * src.data[i*src.step + j - 1]
- src.data[(i + 1)*src.step + j - 1]));
Mat grad_x(src.rows, src.cols, CV_8UC1, Scalar(0));
for (int i = 1; i < src.rows - 1; i++)
for (int j = 1; j < src.cols - 1; j++)
grad_x.data[i*grad_x.step + j] = sqrt((src.data[(i - 1)*src.step + j - 1] + 2 * src.data[(i - 1)*src.step + j]
+ src.data[(i - 1)*src.step + j + 1] - src.data[(i + 1)*src.step + j - 1]
- 2 * src.data[(i + 1)*src.step + j]
- src.data[(i + 1)*src.step + j + 1])* (src.data[(i - 1)*src.step + j - 1] + 2 * src.data[(i - 1)*src.step + j]
+ src.data[(i - 1)*src.step + j + 1] - src.data[(i + 1)*src.step + j - 1]
- 2 * src.data[(i + 1)*src.step + j]
- src.data[(i + 1)*src.step + j + 1]));
imshow("ԭͼ", src);
imshow("gradient", dstImage);
imshow("Vertical gradient", grad_y);
imshow("Horizontal gradient", grad_x);
waitKey(0);
return 0;
以上是关于OpenCV 边缘检测之Sobel算子的主要内容,如果未能解决你的问题,请参考以下文章