ROS命令
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS命令相关的知识,希望对你有一定的参考价值。
1.功能包、功能包集相关
(1) rospack find turtlesim:查找turtlesim包的路径
/opt/ros/noetic/share/turtlesim
(2) rosls turtlesim:可获取功能包下面的文件列表
cmake images msg package.xml srv
(3) rosstack find [stack_name]:查找已经在系统中安装过的某个功能包集
(4)roscd turtlesim:进入某个文件夹
(5) roscreate-pkg [package_name] [depend1] [depend2] [depend3]创建新的功能包
roscreate-pkg test std_msgs rospy roscpp

创建之后,ls看到目录
CMakeLists.txt include mainpage.dox Makefile manifest.xml src
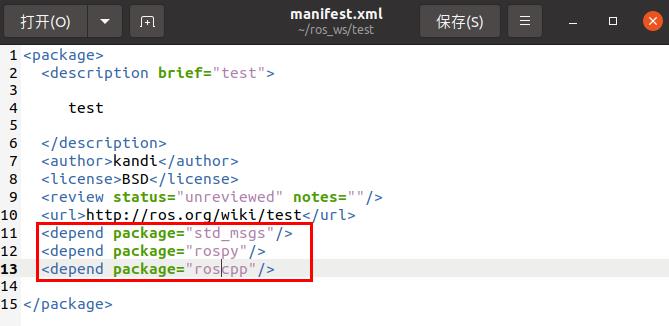
manifest.xml的内容如下
(6) rospack depends test:查看功能包的依赖关系
[rospack] Error: the rosdep view is empty: call ‘sudo rosdep init’ and ‘rosdep update’
2.工作空间
(1) echo $ROS_PACKAGE_PATH:查看ROS正在使用的工作空间
/opt/ros/noetic/share
(2) 创建工作空间的目录:mkdir ros_ws
创建了工作目录对应的文件夹ros_ws后,有必要将此新路径添加到ROS_PACKAGE_PATH中,需要在~/.bashrc文件的末尾添加创建的路径
echo “export ROS_PACKAGE_PATH=~/ros_ws:$ROS_PACKAGE_PATH” >> ~/.bashrc
然后执行此文件:. ~/.bashrc
然后再echo $ROS_PACKAGE_PATH确认添加的路径是否有效
/home/kandi/ros_ws:/opt/ros/noetic/share
这些依赖项包括:
std_msgs:包含了常见消息类型。
rospy:一个ROS的纯python客户端库
roscpp:使用C++实现ROS的各种功能,它提供了一个客户端库,程序员能够调用这些接口快速完成与ROS的主题、服务和参数相关的开发工作
3.软件包依赖关系
3.1 一级依赖
用法:rospack depends1 study
返回
kandi@ubuntu:~$ rospack depends1 study
roscpp
rospy
std_msgs
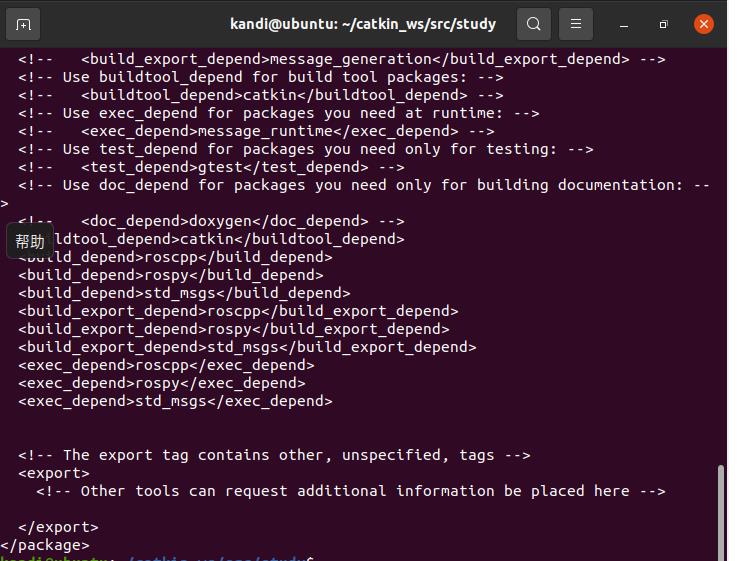
rospack列出了在运行catkin_create_pkg命令时作为参数的依赖包,这些依赖关系存储在package.xml文件中,我们cat此文件内容如下:
3.2 间接依赖
一个软件包可以有相当多间接的依赖关系,好在使用rospack可以递归检测出所有嵌套的依赖包。
kandi@ubuntu:~/catkin_ws/src/study$ rospack depends study
cpp_common
rostime
roscpp_traits
roscpp_serialization
catkin
genmsg
genpy
message_runtime
gencpp
geneus
gennodejs
genlisp
message_generation
rosbuild
rosconsole
std_msgs
rosgraph_msgs
xmlrpcpp
roscpp
rosgraph
ros_environment
rospack
roslib
rospy
以上是关于ROS命令的主要内容,如果未能解决你的问题,请参考以下文章