翻译: 构建基于卡尔曼滤波器的 IMU 用速度数据改进 IMU 姿态估计
Posted AI架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了翻译: 构建基于卡尔曼滤波器的 IMU 用速度数据改进 IMU 姿态估计相关的知识,希望对你有一定的参考价值。
IMU(惯性测量单元)是一种聪明的小设备,它试图通过检查物体上的力来估计物体的绝对方向(有时是它的位置)。
业余无人机和计算机输入 IMU 通常查看加速度数据(告知“向下”的位置)、罗盘数据(在 3D 空间中指向北方)和速率陀螺仪数据(告知旋转轴和速度)。“向下”和“向北”组合可以给出非常准确的方向约束,但不幸的是,如果有任何横向力(风;转弯),它们将与“向下”混合并扭曲估计。卡尔曼滤波器使用矩阵数学来充分利用陀螺仪数据来对此进行校正。然而,一个不断加速的无人机仍然可能被愚弄在什么地方。
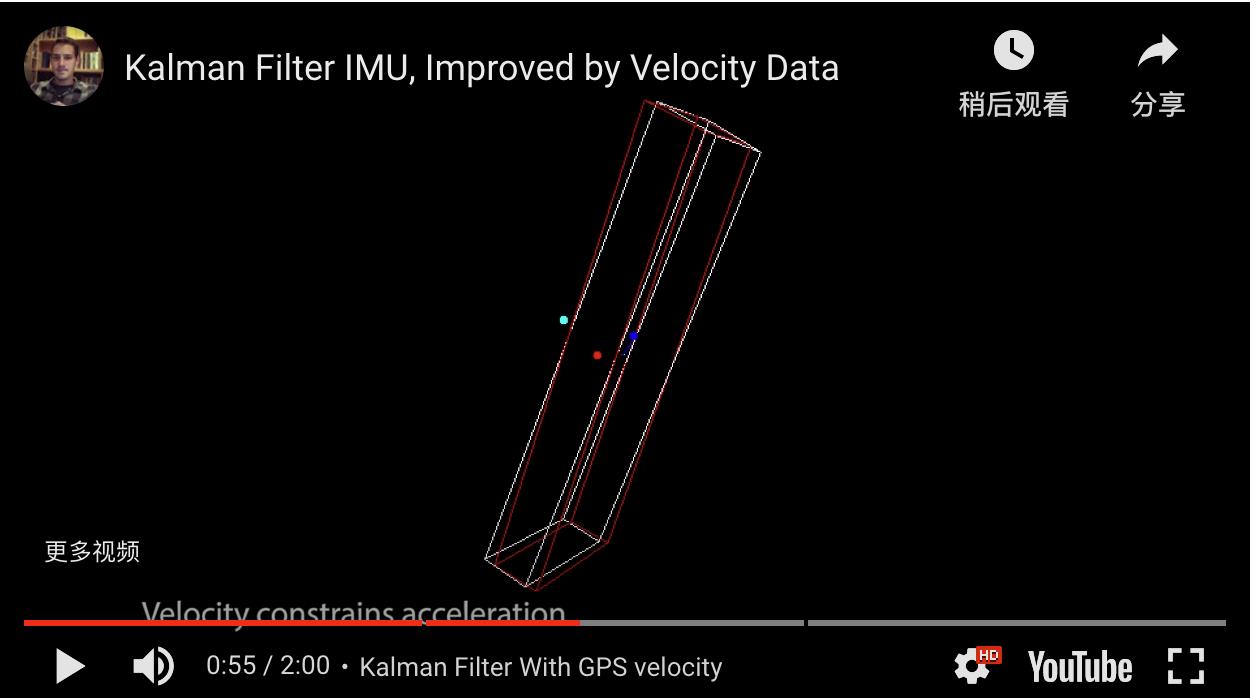
我在这里尝试找出我们是否可以尝试对无人机的平移进行建模,并在估计方向时考虑到这一点。事实证明,即使是关于速度的相对较差和不频繁的数据也可以很好地限制加速度——从而“向下”——。估计质量的差异是显而易见的。
这一切都是通过使用普通动力学以数学方式模拟 3D 移动对象并用高斯随机力对其进行打击,然后预测嘈杂的传感器可能返回的数据来完成的。使用卡尔曼滤波器(不知道原始状态)的预测器算法试图尽其所能恢复真实状态。真相在这里被渲染为白色,而估计值则被渲染为红色。
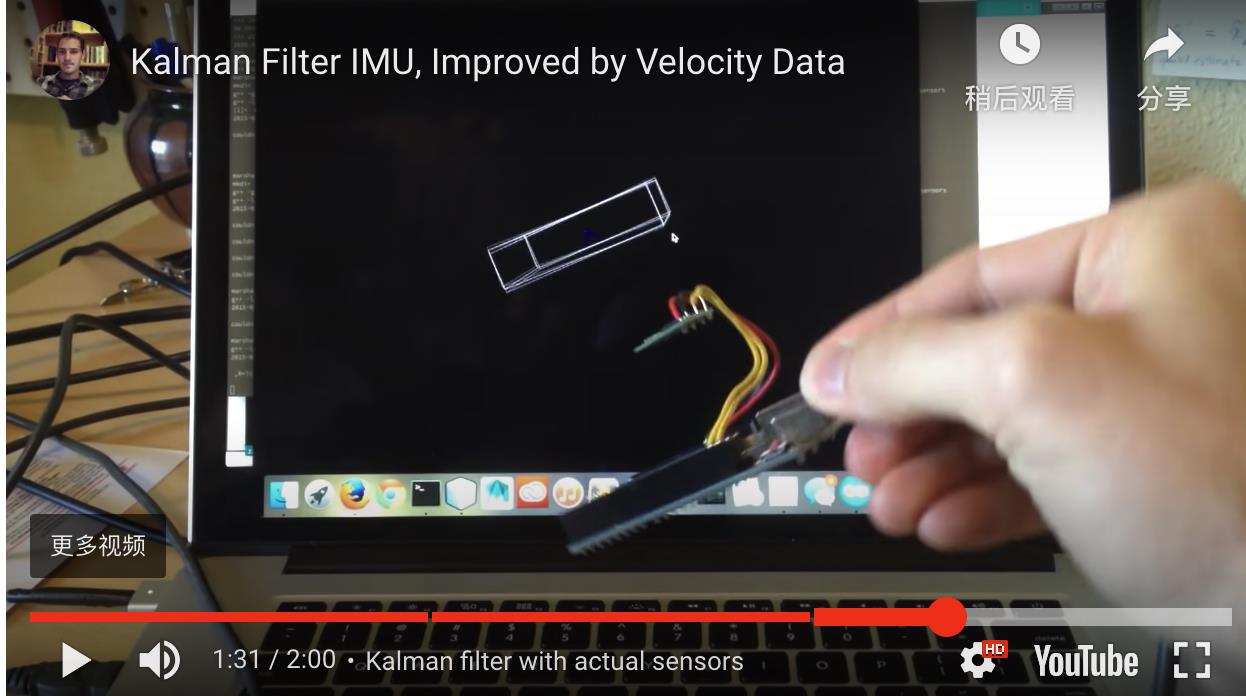
最后,您可以看到在实际传感器上运行的相同算法。实物还没用GPS,不过预测还是不错的!(在这个视频中没有太多的持续加速可以摆脱它)。
我已经用代码做了一些其他很酷的事情,也许我会在未来写出来:其中有一个基于高斯随机游走的过程噪声模型,以及它对四元数的很好的扩展(这对估计的质量!)我还使用了自动微分,这使得线性化扩展卡尔曼滤波器 (EKF) 实现起来特别容易和稳健。
参考
https://www.bzarg.com/p/improving-imu-attitude-estimates-with-velocity-data/
以上是关于翻译: 构建基于卡尔曼滤波器的 IMU 用速度数据改进 IMU 姿态估计的主要内容,如果未能解决你的问题,请参考以下文章