多领导者改进算法的MATLAB仿真
Posted fpga&matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了多领导者改进算法的MATLAB仿真相关的知识,希望对你有一定的参考价值。
%多领导者改进算法
%---------系统附初值------------------------
clear;clc;
loop=500; %确定循环周期
s=0.1; %s取值范围为(0,1)
n=10; %初始化智能体个数
r=6; %初始化智能体感知半径
dw=5; %网格Lattice距离
a=1;b=2; %0<=a<=b
c1=0.1;c2=0.2; %领导者影响函数参数,c1,c2>0
step=0.1; %确定步长
h=0.9; %定义参数h,其取值范围为(0,1)
size=50; %初始范围
%---------系统初始化------------------------
q=size*rand(2,n); %初始化智能体初始位置向量
p=2*rand(2,n)-1; %初始化智能体初始速度向量
qr1=size*rand(2,1); %初始领导者1位置向量
pr1=2*rand(2,1)-1; %初始领导者1速度向量
qr2=size*rand(2,1); %初始领导者2位置向量
pr2=2*rand(2,1)-1; %初始领导者2速度向量
qqr1=zeros(2,loop); %每个时间段领导者的位置向量
ppr1=zeros(2,loop); %每个时间段领导者的速度向量
qqr2=zeros(2,loop); %每个时间段领导者的位置向量
ppr2=zeros(2,loop); %每个时间段领导者的速度向量
qq=zeros(2,n,loop); %每个时间段的位置向量
pp=zeros(2,n,loop); %每个时间段的速度向量
ra=(1/s)*[sqrt(1+s*(r^2))-1];
dwa=(1/s)*[sqrt(1+s*(dw^2))-1];
%----------开始循环--------------------------
%对智能体进行循环,实验主题
for ld=1:loop
qq(:,:,ld)=q(:,:);
pp(:,:,ld)=p(:,:);
qqr1(:,ld)=qr1(:,:);
ppr1(:,ld)=pr1(:,:);
qqr2(:,ld)=qr2(:,:);
ppr2(:,ld)=pr2(:,:);
ur1(:,1)=cos(qr1(:,1));
ur2(:,1)=cos(qr2(:,1));
qr=zeros(2,10);
pr=zeros(2,10);
%-------给每个智能体对应领导者--------------
%----1~5跟随领导者1,6~10跟随领导者2---------
for j=1:10
if j>=1&j<=5
qr(:,j)=qr1(:,1);
else
qr(:,j)=qr2(:,1);
end
end
for j=1:10
if j>=1&j<=5
pr(:,j)=pr1(:,1);
else
apr(:,j)=pr2(:,1);
end
end
%----------------系统结构搭建-----------------------
%定义共识网络A,判断智能体之间的相互影响
A=zeros(n,n);
for i=1:n
for j=1:n
if [q(1,i)-q(1,j)]^2+[q(2,i)-q(2,j)]^2<=r^2
A(i,j)=1;
end
end
end
for i=1:n
A(i,i)=0;
end
%求agent之间距离d
d=zeros(n,n);
for i=1:n
for j=1:n
d(i,j)=sqrt((q(1,i)-q(1,j)-qr(1,i)+qr(1,j))^2+(q(2,i)-q(2,j)-qr(2,i)+qr(2,j))^2);
end
end
%实现fya(z)
%计算n(i,j)
N=zeros(n,n,2);
for i=1:n
for j=1:n
N(i,j,1)=(q(1,j)-q(1,i))/sqrt(1+s*d(i,j)^2);
N(i,j,2)=(q(2,j)-q(2,i))/sqrt(1+s*d(i,j)^2);
end
end
%计算dai=||qj-qi+qri-qrj||σ
da=zeros(n,n);
for i=1:n
for j=1:n
da(i,j)=(1/s)*[sqrt(1+s*(d(i,j)^2))-1];
end
end
%计算fya(da)
fya=zeros(n,n);
ph=zeros(n,n);
for i=1:n
for j=1:n
z1=da(i,j)/ra;
if z1<h & z1>=0
ph(i,j)=1;
elseif z1<=1|z1>=h
ph(i,j)=0.5*(1+cos(pi*((z1-h)/(1-h))));
else
ph(i,j)=0;
end
z2=da(i,j)-dwa;
c=(b-a)/sqrt(4*a*b);
fy(i,j)=0.5*((a+b)*((z2+c)/sqrt(1+(z2+c)^2))+(a-b));
fya(i,j)=ph(i,j)*fy(i,j)*A(i,j);
end
end
%-----------------求智能体的位置影响------------------
%求u11=fya*N(i,j)
u11=zeros(n,n,2);
for i=1:n
for j=1:n
u11(i,j,1)=fya(i,j)*N(i,j,1);
u11(i,j,2)=fya(i,j)*N(i,j,2);
end
end
u1=zeros(2,n);
for i=1:n
for j=1:n
u1(1,i)=u1(1,i)+u11(i,j,1);
u1(2,i)=u1(2,i)+u11(i,j,2);
end
end
%----------------求智能体的速度影响----------------------
%求u22=aij*(pj-pi-prj+pri)
u22=[n,n,2];
for i=1:n
for j=1:n
u22(i,j,1)=A(i,j)*(p(1,j)-p(1,i)-pr(1,i)+pr(1,i));
u22(i,j,2)=A(i,j)*(p(2,j)-p(2,i)-pr(2,i)+pr(2,i));
end
end
%u2为反馈2
u2=zeros(2,n);
for i=1:n
for j=1:n
u2(1,i)= u22(i,j,1)+ u2(1,i);
u2(2,i)= u22(i,j,2)+ u2(2,i);
end
end
%-----------------求领导者的影响------------------
u3=zeros(2,n);
for i=1:5
u3(1,i)=-c1*(q(1,i)-qr1(1,1))-c2*(p(1,i)-pr1(1,1));
u3(2,i)=-c1*(q(2,i)-qr1(2,1))-c2*(p(2,i)-pr1(2,1));
end
for i=6:10
u3(1,i)=-c1*(q(1,i)-qr2(1,1))-c2*(p(1,i)-pr2(1,1));
u3(2,i)=-c1*(q(2,i)-qr2(2,1))-c2*(p(2,i)-pr2(2,1));
end
%-----------------求加速度u---------------------------
%----各智能体在计算时加入其领导智能体的加速度反馈ur------
u=zeros(2,n);
for i=1:2
for j=1:5
u(i,j)=u1(i,j)+u2(i,j)+u3(i,j)+ur1(i,1);
end
end
for i=1:2
for j=6:10
u(i,j)=u1(i,j)+u2(i,j)+u3(i,j)+ur2(i,1);
end
end
%----------------进行下一步运算--------------
%-------------智能体离散计算------------
for i=1:2
for j=1:n
q(i,j)=q(i,j)+step*p(i,j);
p(i,j)=p(i,j)+step*u(i,j);
end
end
%------------虚拟领导者离散计算------------
for i=1:2
qr1(i,1)=qr1(i,1)+step*pr1(i,1);
pr1(i,1)=pr1(i,1)+step*ur1(i,1);
end
for i=1:2
qr2(i,1)=qr2(i,1)+step*pr2(i,1);
pr2(i,1)=pr2(i,1)+step*ur2(i,1);
end
end
%---------------------循环结束,绘图------------------------
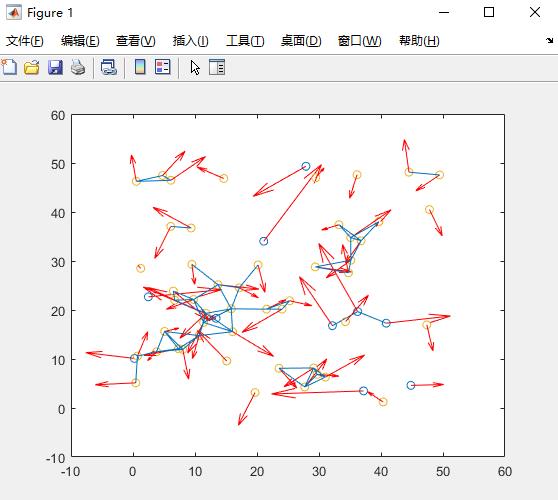
%---------------------智能体初始时刻状态--------------------
figure(1);
plot(qq(1,:,1),qq(2,:,1),'o');
hold on;
quiver(qq(1,:,1),qq(2,:,1),pp(1,:,1),pp(2,:,1),'Color','red');
for i=1:n
for j=1:n
if sqrt((qq(1,i,1)-qq(1,j,1))^2+(qq(2,i,1)-qq(2,j,1))^2)<=r
line([qq(1,i,1),qq(1,j,1)],[qq(2,i,1),qq(2,j,1)]);
end
end
end
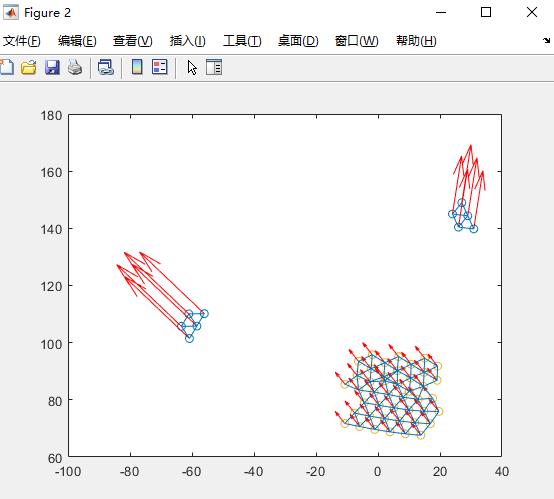
%-------------------智能体最终时刻状态---------------
figure(2);
plot(qq(1,:,loop),qq(2,:,loop),'o');
hold on;
quiver(qq(1,:,loop),qq(2,:,loop),pp(1,:,loop),pp(2,:,loop),'Color','red');
for i=1:n
for j=1:n
if sqrt((qq(1,i,loop)-qq(1,j,loop))^2+(qq(2,i,loop)-qq(2,j,loop))^2)<=r
line([qq(1,i,loop),qq(1,j,loop)],[qq(2,i,loop),qq(2,j,loop)]);
end
end
end
%--------------------智能体t时刻--------------------------------
%------将下面注释段复制到工作窗,给t赋值,显示步数为t时的状态------
% figure(1);
% plot(qq(1,:,t),qq(2,:,t),'o');
% hold on;
% quiver(qq(1,:,t),qq(2,:,t),pp(1,:,t),pp(2,:,t),'Color','red');
% for i=1:n
% for j=1:n
% if sqrt((qq(1,i,t)-qq(1,j,t))^2+(qq(2,i,t)-qq(2,j,t))^2)<=r
% line([qq(1,i,t),qq(1,j,t)],[qq(2,i,t),qq(2,j,t)]);
% end
% end
% end
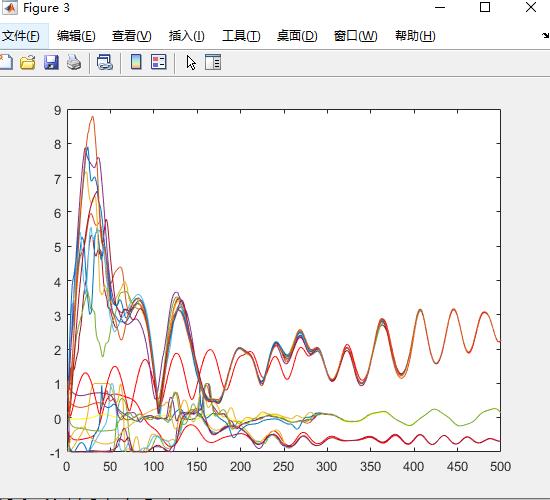
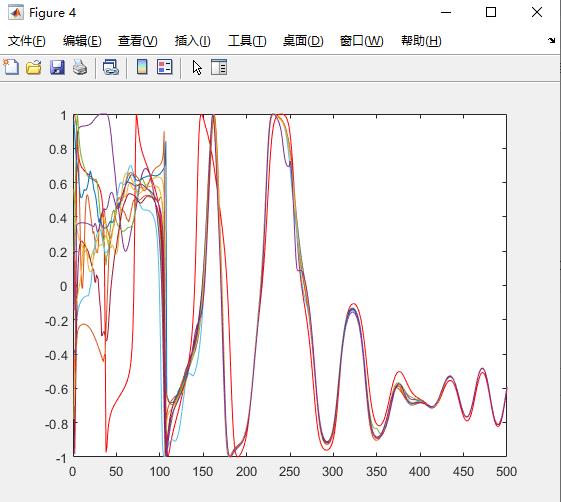
%------------智能体速度方向跟随情况---------------------------
%-----------画领导者方向----------------
figure(3);
mdqr=zeros(1,loop);
for i=1:loop
mdqr(1,i)=sqrt((ppr1(1,i))^2+(ppr1(2,i))^2);
csqr(1,i)=ppr1(1,i)/mdqr(1,i);
end
plot(1:loop,csqr(1,1:loop),'color','red')
hold on
mdqr=zeros(1,loop);
for i=1:loop
mdqr(1,i)=sqrt((ppr2(1,i))^2+(ppr2(2,i))^2);
csqr(1,i)=ppr2(1,i)/mdqr(1,i);
end
plot(1:loop,csqr(1,1:loop),'color','yellow')
hold on
%-----------画一般智能体---------------
for i=1:n
for j=1:loop
mdq(i,j)=sqrt((pp(1,i,j))^2+(pp(2,i,j))^2);
csq(i,j)=pp(1,i,j)/mdq(i,j);
end
end
for i=1:10
plot(1:loop,csq(i,1:loop))
hold on
end
D124
以上是关于多领导者改进算法的MATLAB仿真的主要内容,如果未能解决你的问题,请参考以下文章