自动驾驶 10-3: 全球导航卫星系统 (GNSS)The Global Navigation Satellite Systems
Posted AI架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 10-3: 全球导航卫星系统 (GNSS)The Global Navigation Satellite Systems相关的知识,希望对你有一定的参考价值。
欢迎回来。在这个视频中,我们将讨论一种特定类型的传感器 你们大多数人会非常熟悉, 全球导航卫星系统或 GNSS 接收器。
我们将了解为什么这个导航传感器 对自动驾驶汽车来说非常重要。
它能够在任何地方提供定位 具有有限误差的世界,这是关键。
具体来说,我们将为 GNSS 开发一个模型 基于伪距和三边测量原理。
然后我们将熟悉 GNSS 定位的来源 错误并谈谈改进一种 GNSS 的一些方法。
就像在之前的讲座中讨论的 IMU 一样, 几乎每部现代智能手机都至少配备一种类型的 GNSS 接收器。
虽然我们现在认为它们是理所当然的, 第一个现代全球定位卫星系统, GPS,是为 1980 年代的军事用途而设计的。
到 1995 年第二版系统全面运行时, GPS 向公众免费提供。
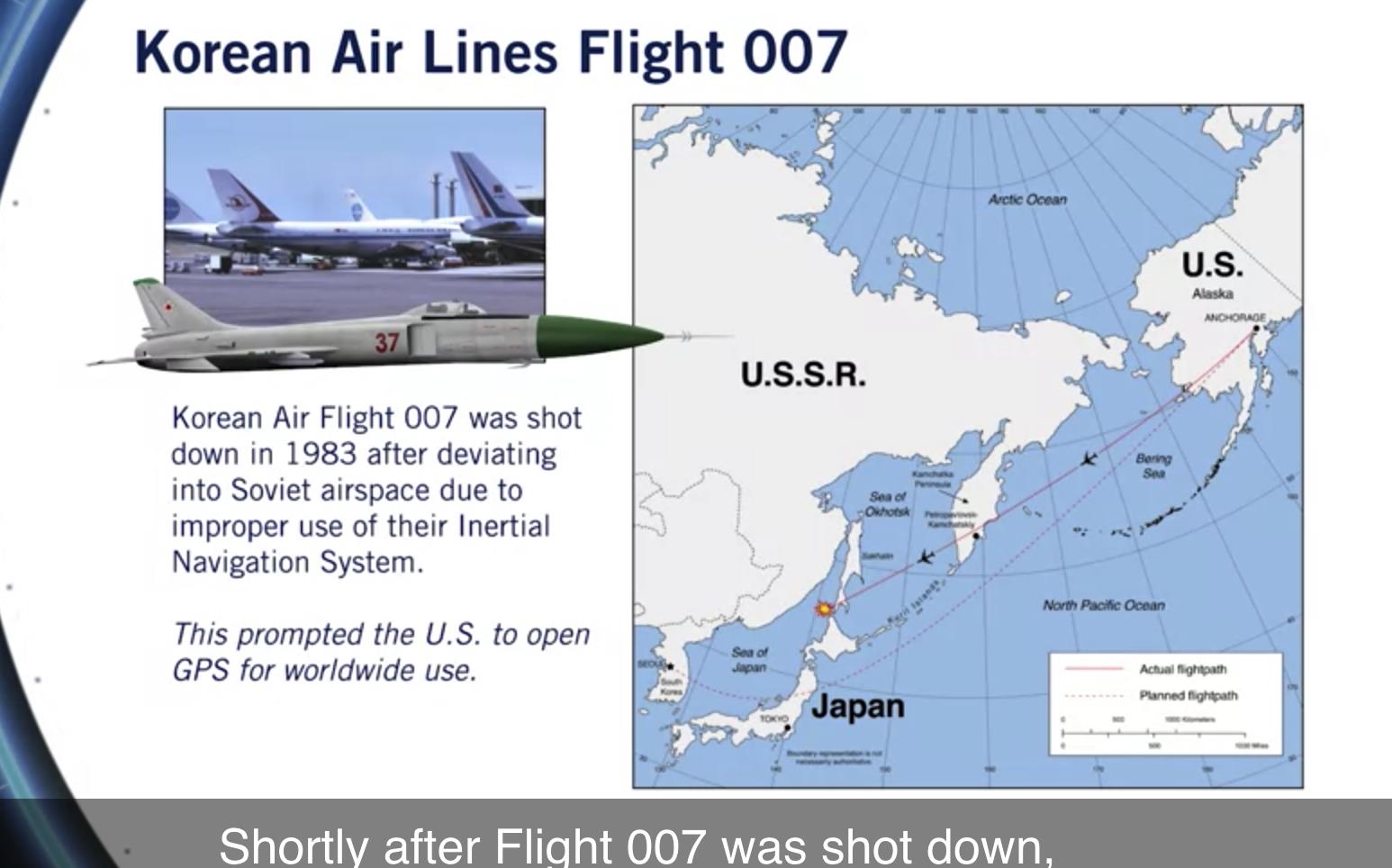
这部分是由于高度宣传的崩溃 1983年大韩航空007航班。
007 航班是一架 747 客机 从纽约市到首尔,在阿拉斯加安克雷奇加油站。
当它从安克雷奇飞往首尔时, 它偏离了计划的飞行路线并被击落 在苏联领空停留了几个小时后的一架战斗机。
横渡北太平洋, 007航班依靠惯性导航系统进行引导。
飞行员未能正确初始化系统, 错误地将飞机保持在特定的磁航向。
反过来,飞机偏离了 距其计划航线 300 多公里。
007航班被击落后不久, 然后罗纳德·里根总统发布了一项指令,允许 美国全球定位系统 一旦完全开发,就可以免费向公众开放。
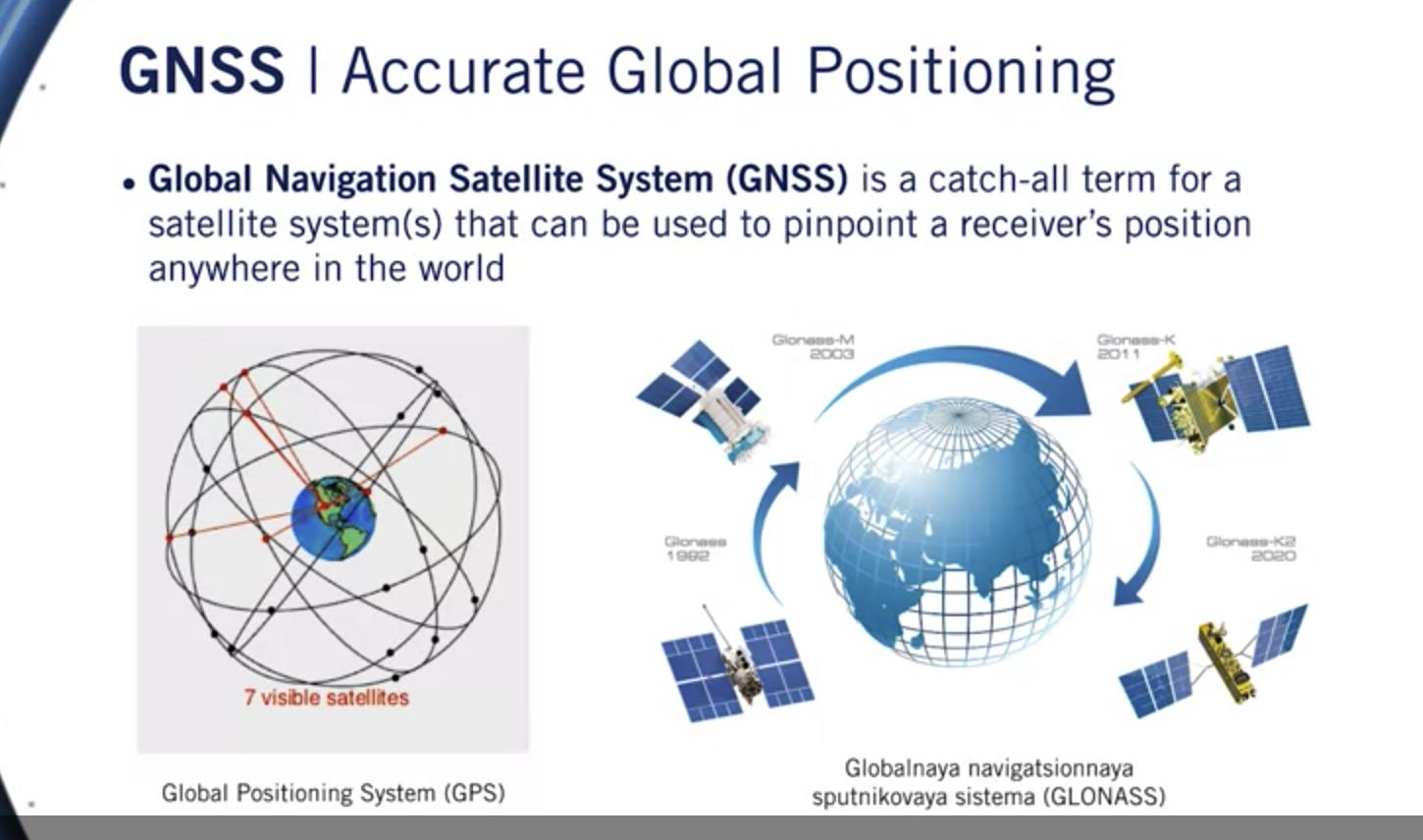
虽然 GPS 是最初的系统 用于全球定位的导航卫星,今天, 术语全球导航卫星系统被用作 包罗万象的几个这样的卫星星座。
截至 2018 年全面投入运营的两个项目是 GPS 和 GLONASS,相当于俄罗斯。 其他几个系统即将完成 包括欧洲伽利略星座。
在本视频中,我们将更仔细地查看 GPS, 尽管其他 GNSS 系统以类似的原理运行。
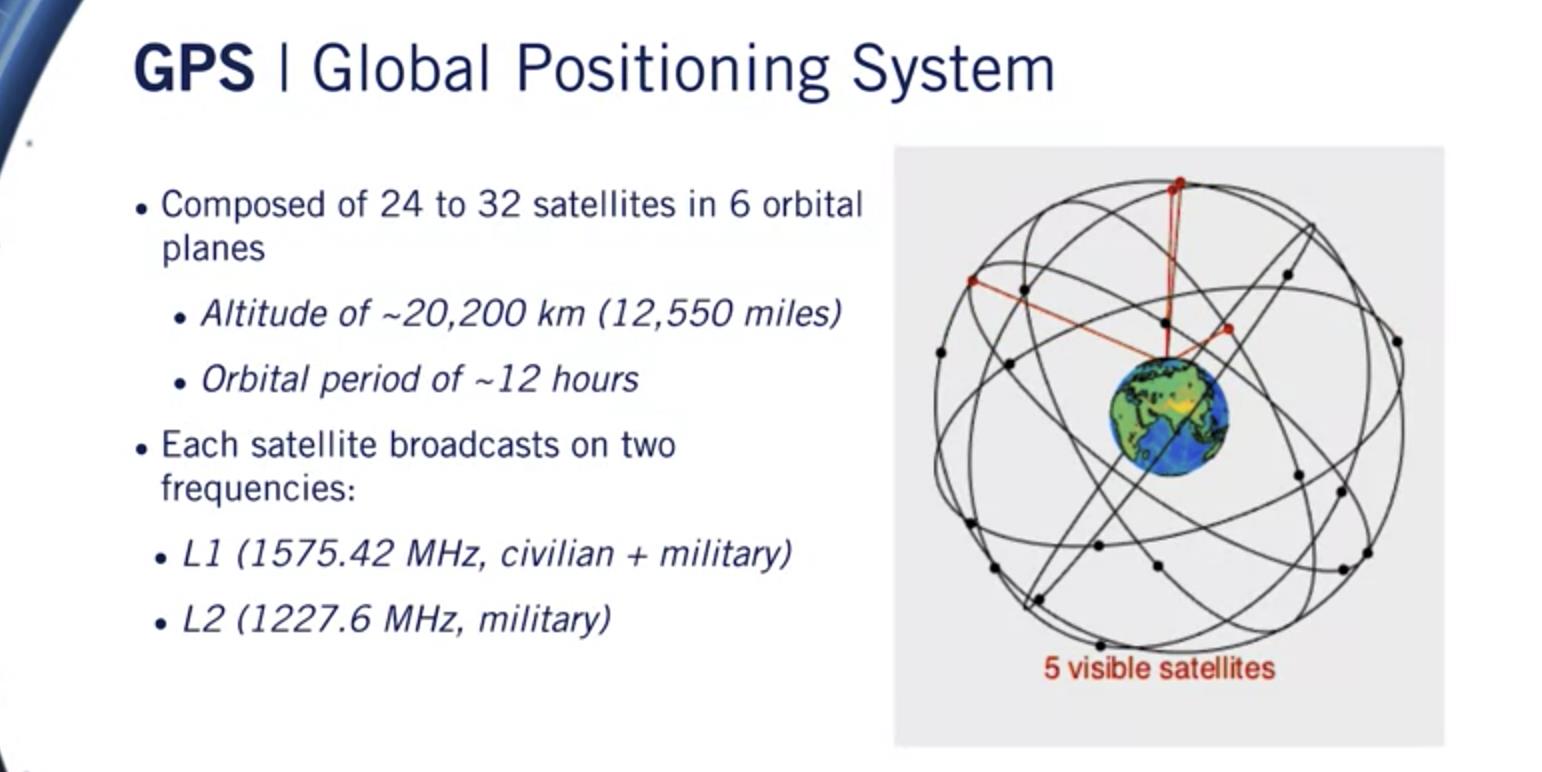
GPS星座由 位于六个轨道平面的 24-32 颗卫星。
卫星会定期退役和更换。
每颗卫星都不是中等地球轨道,高度约为 20,000 公里,轨道周期不到 12 小时。
星座被设计成至少有四颗卫星 在任何时候都可以在地球上的任何表面点看到。
每颗卫星在两个频率上广播, 一种是民用的,一种是军用的。
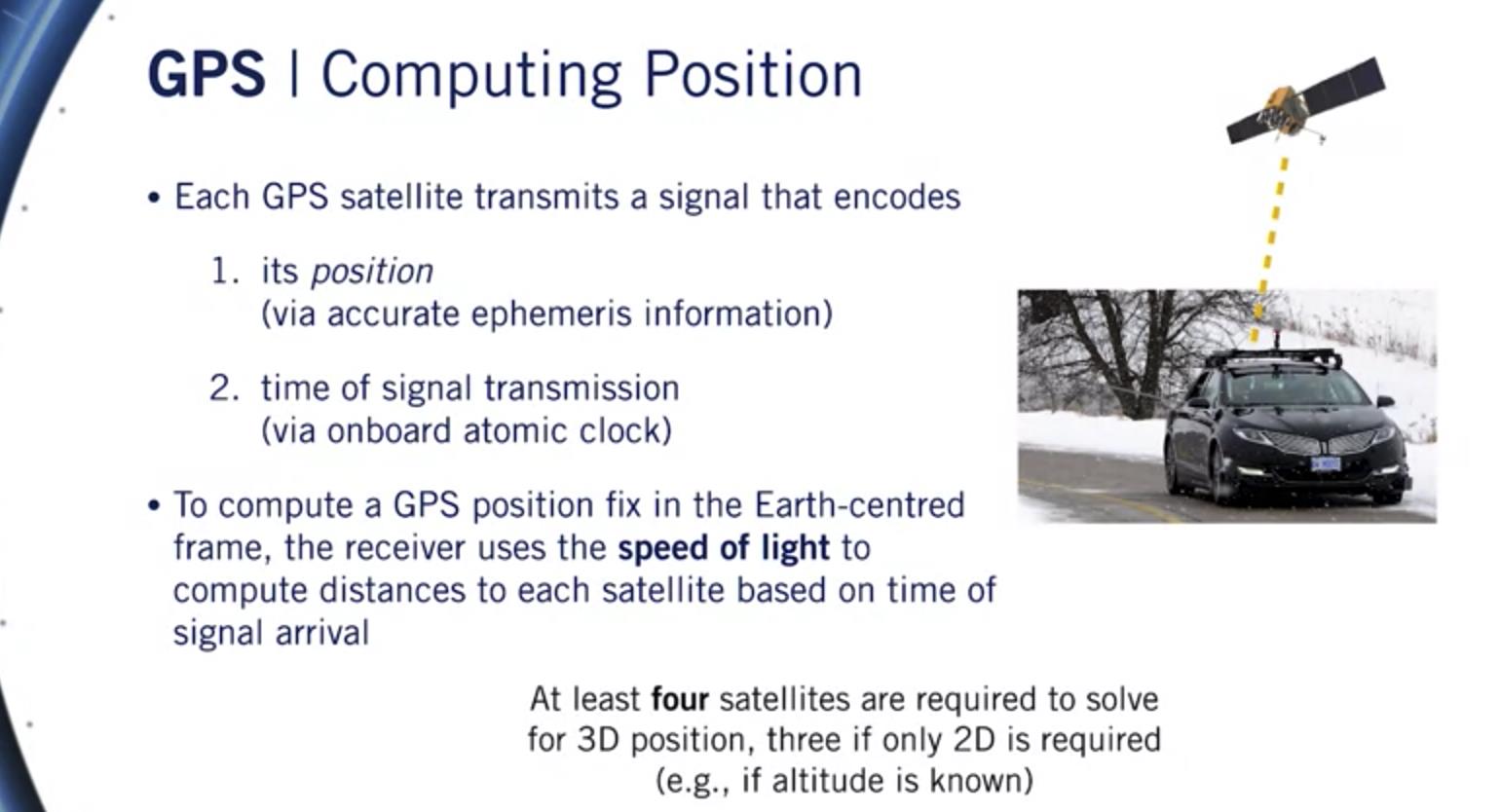
每个广播信号都包含一个伪随机码 识别卫星位置和 信号的传输时间。
GPS 背后的基本原理是到达时间测距。
接收器通过以下方式计算到每个可见卫星的距离 将其内部时钟与传输时间进行比较。
使用以下知识将时间差转换为距离 电磁信号以光速传播。
要计算 3D 位置, 测距方程至少需要四颗可见卫星。
如果高度已知并且只需要二维位置, 只需要三颗卫星。
从几个距离恢复位置的过程 已知的地标称为三边测量。
请注意,这与三角剖分不同,其中 我们根据角度测量计算位置。
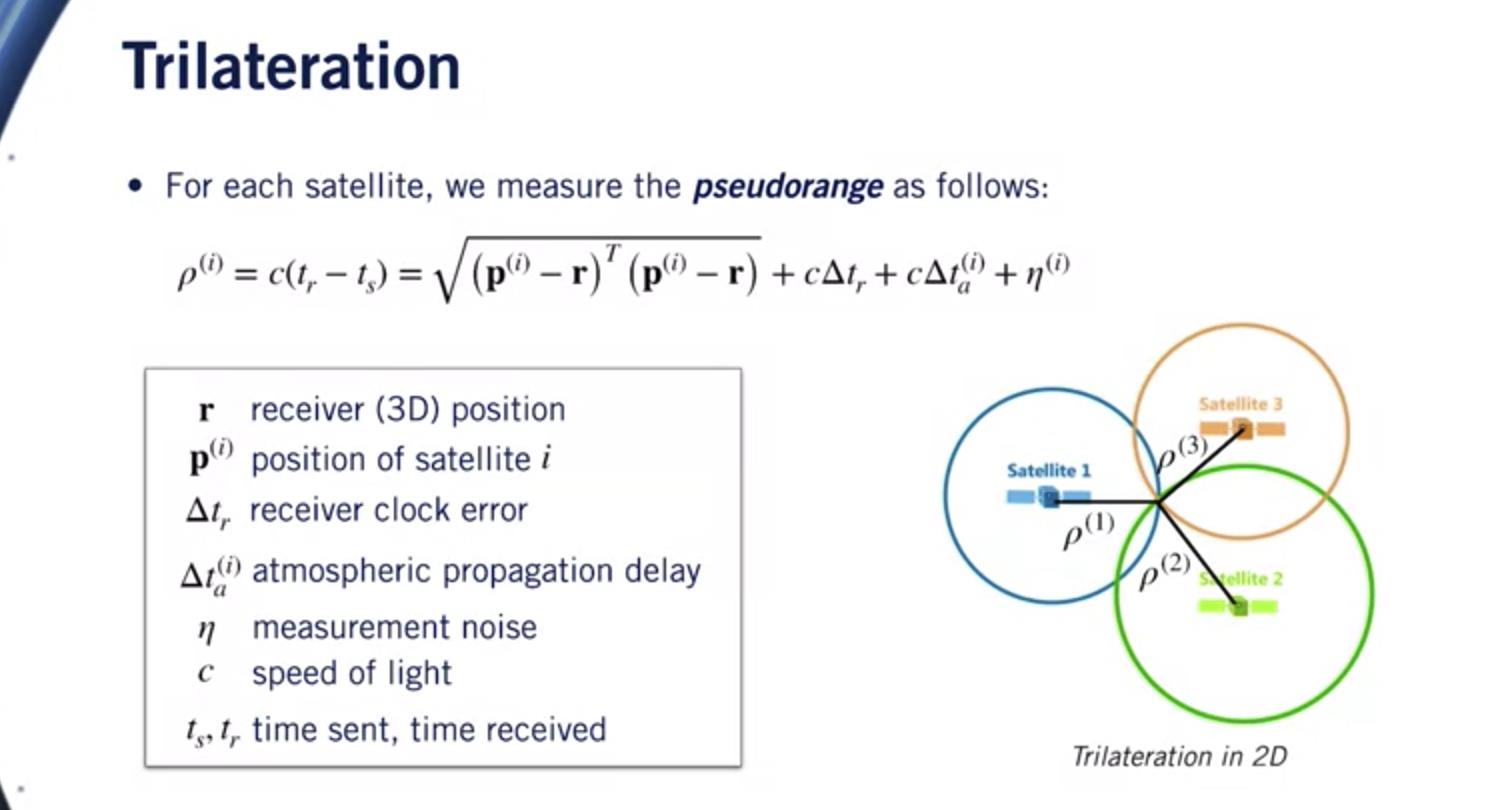
GPS 接收器使用以下方法测量到每颗卫星的伪距 以下测量模型: 该模型考虑了接收器时钟误差, 大气传播延迟和测量噪声。
术语伪距指的是这样一个事实 范围信息被上述错误源破坏。
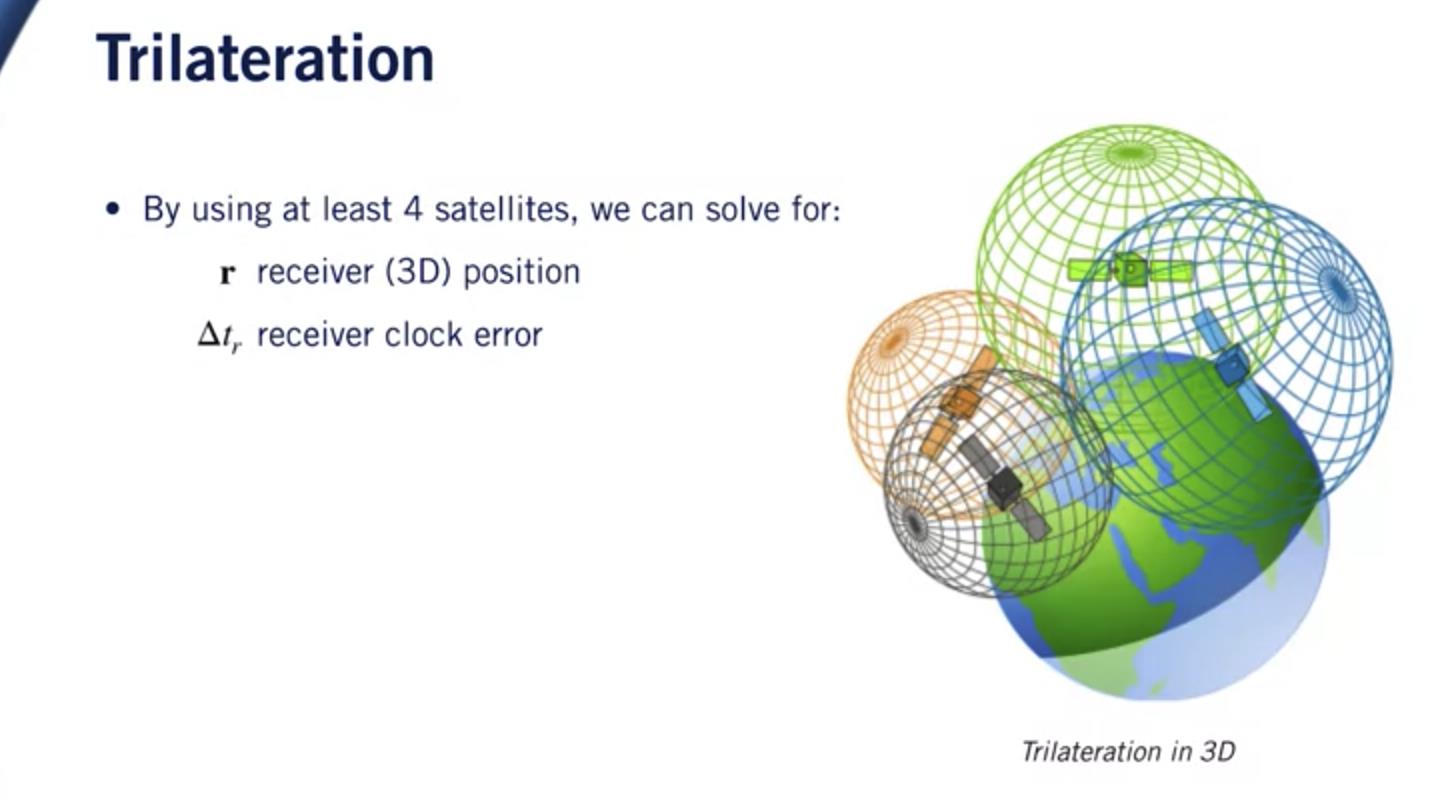
每个伪距测量在 2D 中定义一个圆或在 3D 中定义一个球体。
如果我们正好有四颗卫星 我们可以求解接收器的位置和 明确接收器时钟错误。
如果我们有四个以上, 我们可以使用最小二乘法找到 假设高斯噪声的最大似然位置。
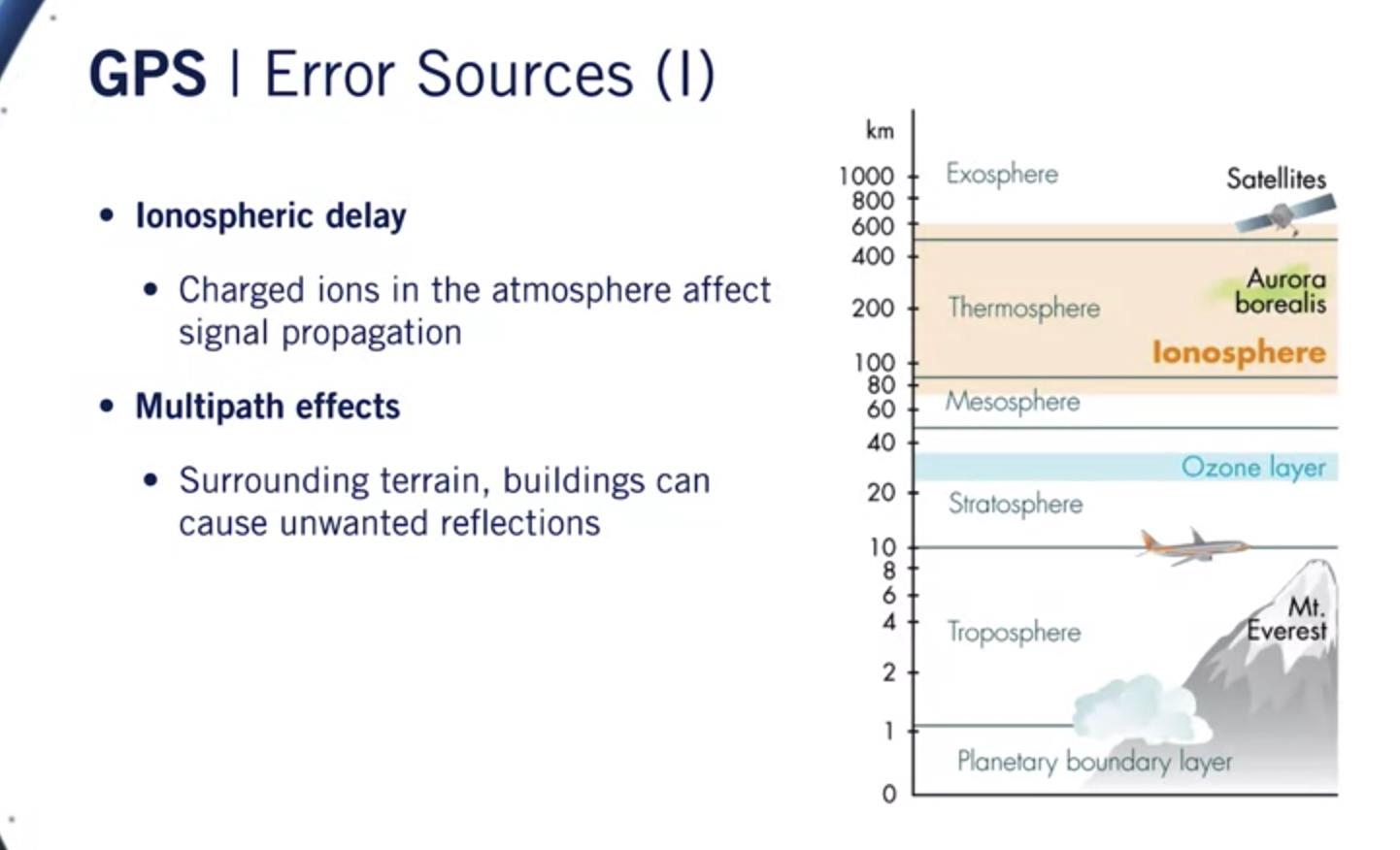
GPS 存在多种误差源。
首先,带电离子 电离层可以将信号延迟未知量。
周围的地形和建筑物可能会导致反射 增加信号在到达接收器之前传播的距离, 这些被称为多路径错误。
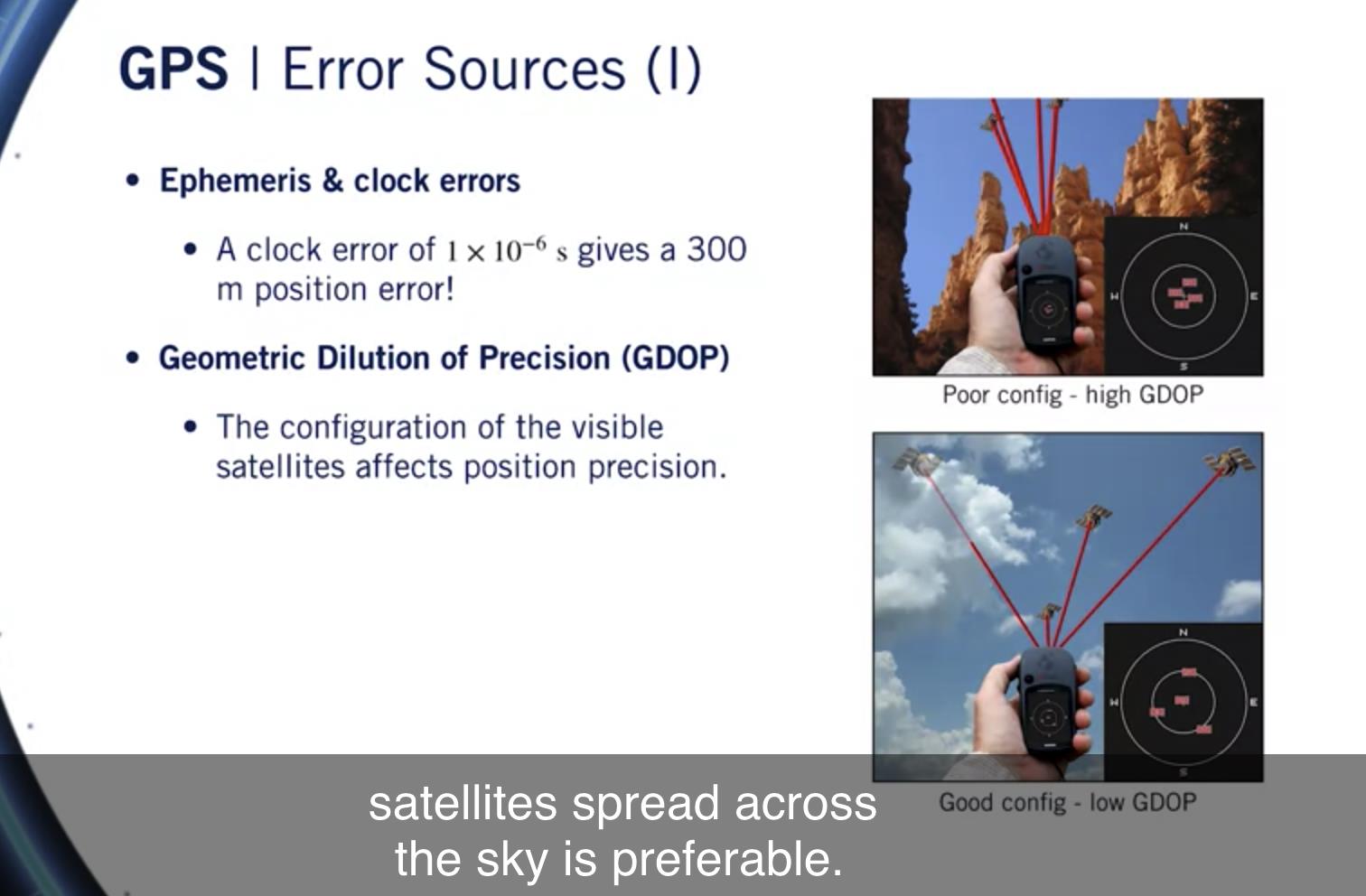
时钟同步中的任何小错误或 卫星位置信息可能会产生灾难性后果。
即使是一微秒的计时错误也会导致 一个明显的位置误差,300 米。
星历数据和卫星时钟 经常更新和重新校准, 但校准可能已过时。
最后,几何构型 可见卫星也可能导致定位精度的变化。
这被称为精度的几何稀释。
为了获得更高的精度,配置 遍布天空的卫星是可取的。
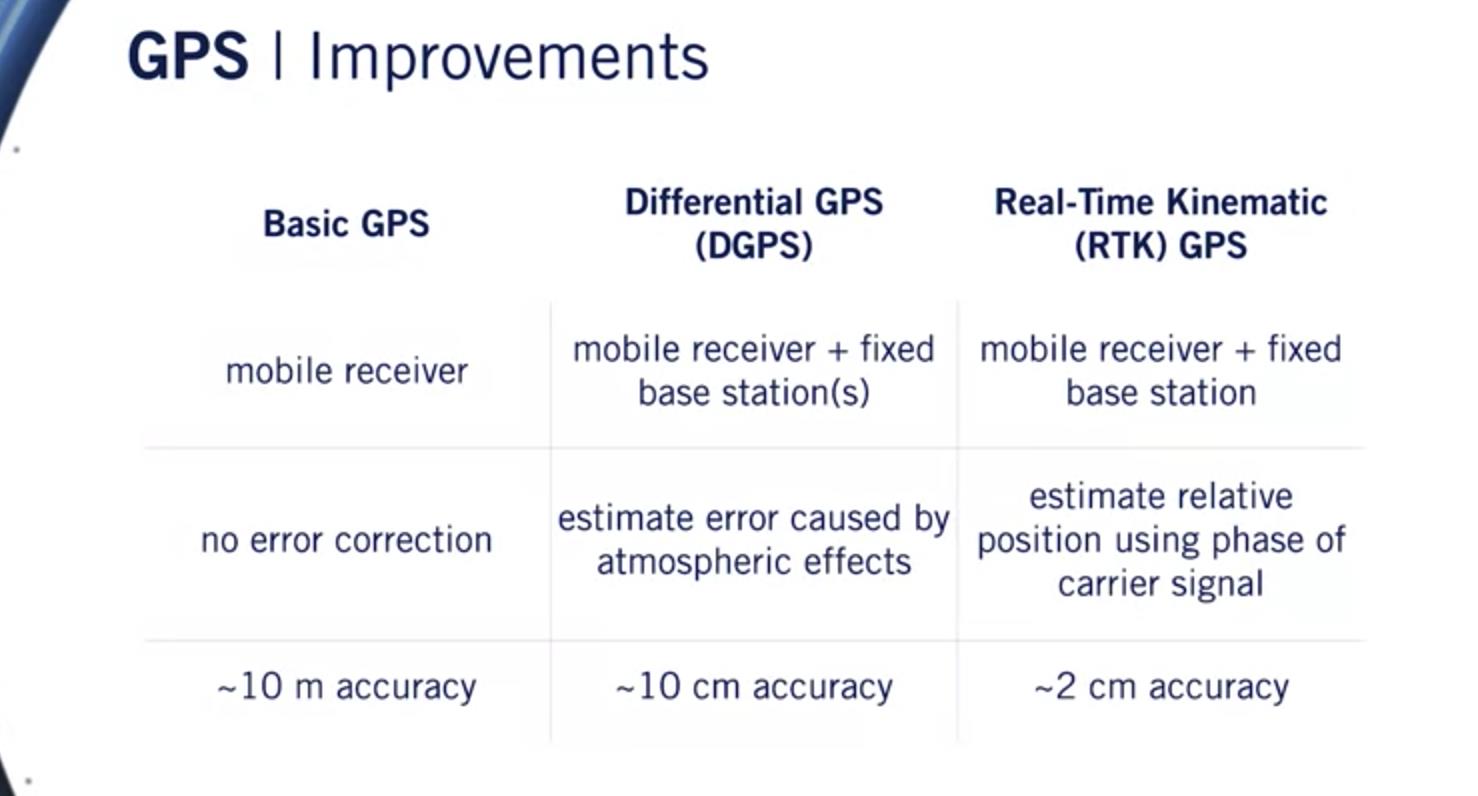
幸运的是,对于某些应用程序, 我们可以通过以各种方式增强系统来提高 GNSS 的准确性。
差分GPS可以纠正 通过使用接收器定位估计 一个或多个固定基站的更准确已知位置。
更正以不同的频率广播到 移动车辆中的 GNSS 接收器。
实时运动学或 RTK GPS 使用 载波相位信息改善 在某些情况下,定位精度可低至两厘米。
虽然这两种技术都可以 显着提高GPS的精度, 它们的实施成本通常很高。
正如我们在之前的视频中提到的, 惯性传感器对于导航非常有用。
然而,随着时间的推移,它们会漂移或累积无限的误差。
相比之下,GPS系统, 提供有界误差定位更新。
配备 GPS 的自动驾驶汽车将保持 始终保证定位精度, 除非 GPS 接收器出现故障或丢失至少四颗卫星的轨道。
所以总结一下这个视频, 全球导航卫星系统通过组合工作 来自至少四颗卫星的伪距以确定 3D 位置。
GPS 或 GNSS 错误可能来自 几个不同的来源,包括电离层延迟, 多径效应,以及 可能来自精度的几何稀释。
为了提高 GNSS 精度, 可以使用差分 GPS 或 RTK GPS 等技术。
本模块到此结束。 在模块四中,我们将描述我们如何 将来自 IMU 的惯性测量与 来自 GPS 的位置测量结果 自动驾驶汽车的准确定位估计。 传感器是互补的,它们被使用 在几乎所有的自动驾驶汽车中。 下个模块见。
补充阅读:全球导航卫星系统(GNSS)
要了解有关 GNSS 演变的更多信息,请查看以下资源:
-
阅读这篇关于各种 GNSS 星座演变的文章。
-
回顾欧盟开发的伽利略全球导航卫星系统、俄罗斯联邦开发的GLONASS系统和中华人民共和国开发的COMPASS (BeiDou-2) 的概述。
参考
https://www.coursera.org/learn/state-estimation-localization-self-driving-cars/lecture/TDlnE/lesson-3-the-global-navigation-satellite-systems-gnss#
以上是关于自动驾驶 10-3: 全球导航卫星系统 (GNSS)The Global Navigation Satellite Systems的主要内容,如果未能解决你的问题,请参考以下文章
翻译:俄国卫星GLONASS 简介 天基全球导航卫星系统 (GNSS)
翻译: 中国北斗卫星导航系统 全球导航卫星系统 (GNSS)