直接激光雷达里程计:基于稠密点云的快速定位
Posted Being_young
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了直接激光雷达里程计:基于稠密点云的快速定位相关的知识,希望对你有一定的参考价值。
点云PCL免费知识星球,点云论文速读。
文章:Direct LiDAR Odometry:Fast Localization with Dense Point Clouds
作者:Kenny Chen1, Brett T. Lopez2, Ali-akbar Agha-mohammadi3, and Ankur Mehta
编译:点云PCL
代码:https://github.com/vectr-ucla/direct_lidar_odometry
欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
论文阅读模块将分享点云处理,SLAM,三维视觉,高精地图相关的文章。公众号致力于理解三维视觉领域相关内容的干货分享,欢迎各位加入我,我们一起每天一篇文章阅读,开启分享之旅,有兴趣的可联系微信dianyunpcl@163.com。
摘要
本文提出了一种轻量前端激光雷达里程计解决方案,用于在计算能力受限的机器人平台上,具有快速和精确的定位能力,我们的直接激光雷达里程计(DLO)方法包括几个关键的算法上的创新,这些创新优先考虑计算效率,并使用稠密的、预处理最少的点云实时提供准确的姿势估计。这是通过一个新的关键帧系统实现的,该系统有效地管理历史地图信息,此外,还提供了一个自定义的迭代最近点解算器,用于点云快速配准和数据管理。我们的方法比目前的方法相比具有更精确,计算开销更低优势,已在空中和有足机器人的若干感知挑战环境中进行了广泛评估。
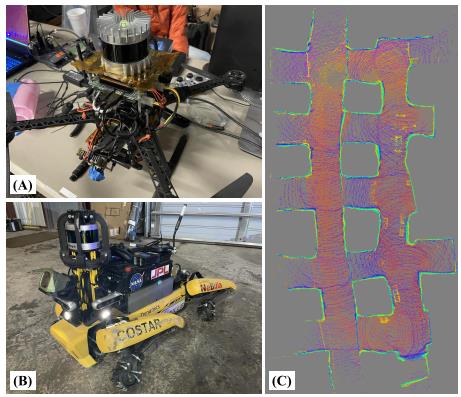
图1,快速轻便的激光雷达里程计,这两个机器人平台,计算资源有限,(A) 定制的四旋翼平台,顶部有一个驱逐OS1激光雷达传感器。(B) Boston Dynamics Spot机器人,装有负载和带防护装置的Velodyne VLP-16。(C) 使用我们的轻型里程计方法在这些机器人上绘制的石矿的俯视图
主要贡献
文章的贡献如下:
(1)提出了一种定制的“速度优先”流程,使用最小预处理的激光雷达扫描点云和消费者级IMU,实时准确地解析机器人的自我运动。
(2)第二,一种新的关键帧系统,自适应场景,并允许高效的基于关键帧的子地图的生成,用于快速的全局姿势优化。
(3)第三,定制迭代点云解算器NanoGICP,用于轻型点云扫描点的匹配,具有跨对象数据共享和数据重用的功能。为了社区的利益,我们已经公开了代码。
主要内容
系统假设输入360度环境的3D激光雷达点云数据,如OS1(20Hz)或Velodyne VLP-16(10Hz),为了最大限度地减少原始传感器数据的信息损失,在预处理过程中只使用了两个滤波器:首先,通过原点周围大小为1立方米的盒子滤波器删除机器人自身可能返回的所有点云。然后,生成的点云通过分辨率为0.25m的三维体素网格滤波器发送,以便在保持周围环境中的主要结构的同时,略微减少后续任务的数据采样。请注意,在这项工作中,我们不校正运动失真,因为非刚性变换可能会带来计算负担,我们直接使用稠密点云,而不是提取特征,平均而言,每帧点云包含了预处理后得到1000点。
A.通过广义ICP点云匹配
基于激光雷达的里程计可被视为通过比较连续点云和内存中的点云来恢复SE(3)变换来解析机器人自我运动的过程。此过程通常分两个阶段运行,首先是提供最佳初始值,随后将其优化为与先前关键帧位置保持其全局一致。
B.基于关键帧的子地图
这项工作的一个关键创新在于我们的系统如何管理地图信息,并在扫描到子地图匹配中导出局部子地图,以进行全局运动优化,我们没有直接使用点云并将点云存储到典型的八叉树数据结构中,而是保留要搜索的关键帧的历史记录,然后,通过从关键帧子集连接相应的点云,而不是直接检索机器人当前位置某个半径内的局部点,来创建用于点云到子地图匹配的结果。
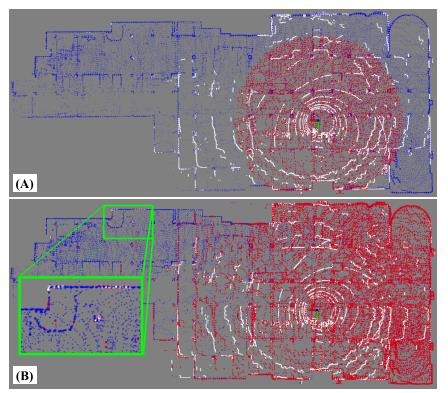
图3,基于关键帧的子地图,不同子地图方法之间的比较,可视化当前扫描点云(白色)、衍生子地图(红色)和完完整地图(蓝色)。
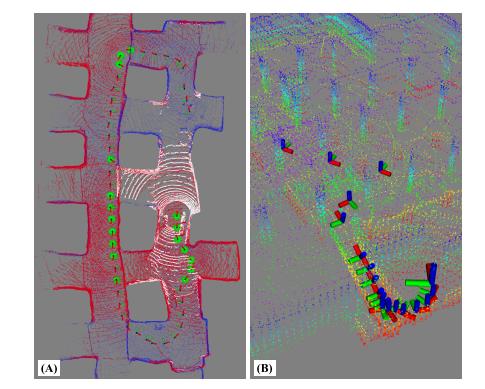
图4.关键帧选择和自适应阈值,(A)该方法的子地图(红色)是通过连接关键帧子集(绿色球体)的扫描点云生成的,该子集由K个最近邻关键帧和构成关键帧集凸包的关键帧组成。(B) 自适应关键帧的图示,在这种情况下,穿过狭窄坡道时,阈值会降低,以便更好地捕捉小细节。
实验
为了研究系统模块的功能,包括基于关键帧的子地图、子地图法线近似和数据结构的重用,这里使用DARPA地下挑战赛城市赛道的Alpha Course数据集将每个模块与其对应模块进行比较,该数据集包含来自Velodyne VLP-16传感器的激光雷达扫描点云,以及来自VectorNav VN-100的IMU测量,该测量在位于华盛顿州埃尔马的废弃发电厂中收集60分钟数据,包含了多个感知挑战,如大型或自相似场景(图5)。

图5,绘制的地图图。使用DLO算法在城市Alpha数据集上生成的稠密的3D点云地图的不同视图和角度。每个时间戳处的估计位置用于将提供的扫描点云转换为世界帧,这是对整个数据集的所有扫描点云进行处理后,并通过体素滤波以生成上述结果
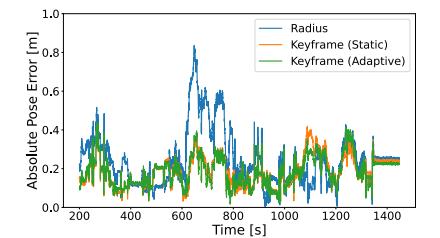
图6,误差比较,在1200秒的滑动窗口中绘制绝对姿势误差,显示半径和关键帧子地图方案之间的差异。
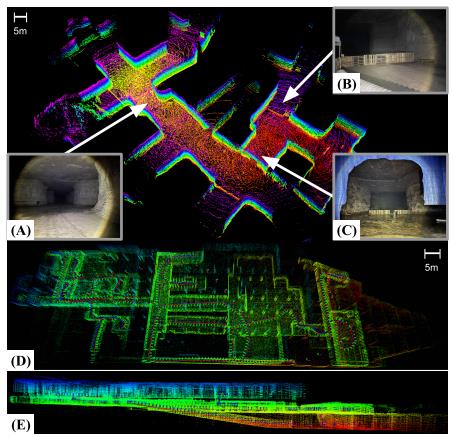
图9,极端环境建图。该环境具有挑战性,例如:(A)低照度,(B)物体障碍物,(C)潮湿泥泞的地形。正视图(D)和侧视图(E)
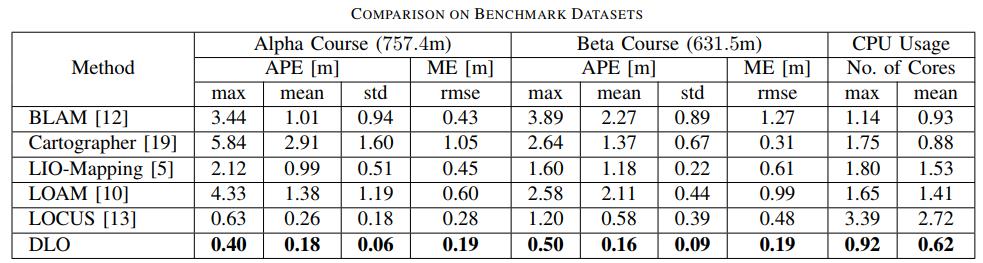
基准数据集的比较结果如下表
总结
这项工作提出了直接激光雷达里程计(DLO),这是一种轻量级和精确的前端定位解决方案,在极端环境中,对于长时间的运行机器人来说,计算开销最小。与其他工作不同的一个关键创新是,如何使用关键帧点云对数据库高效地导出局部子地图,以进行全局姿势优化。我们通过在大规模感知挑战环境中运行的多个平台上进行基准测试和广泛的现场实验,证明了我们方法的可靠性,并邀请其他人使用和评估我们的开源代码。DLO是为美国NASA JPL团队合作伙伴的四旋翼机队在DARPA地下挑战赛中开发和使用的,未来我们对更紧密的IMU集成以及运动失真校正进行研究。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
扫描下方微信视频号二维码可查看最新研究成果及相关开源方案的演示:
如果你对本文感兴趣,请点击“原文阅读”获取知识星球二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作:群主微信“920177957”(需要按要求备注) 联系邮箱:dianyunpcl@163.com,欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶

以上是关于直接激光雷达里程计:基于稠密点云的快速定位的主要内容,如果未能解决你的问题,请参考以下文章