路径规划基于matlab模糊控制机器人路径规划含Matlab源码 1643期
Posted 紫极神光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划基于matlab模糊控制机器人路径规划含Matlab源码 1643期相关的知识,希望对你有一定的参考价值。
一、模糊控制机器人路径规划简介
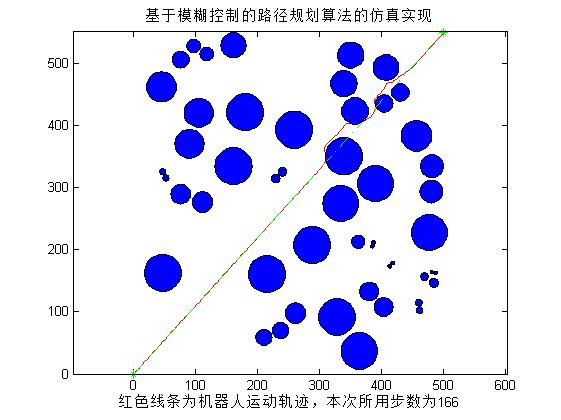
在未知环境下,针对传统模糊控制算法规划路径在某些复杂的障碍物环境中出现的死锁问题,设计了障碍逃脱策略,即当机器人进入陷阱区并在目标点方向不可行时,寻找可行方向并设置方向点,由方向点暂代目标点继续前行,沿方向点走出障碍物陷阱区后,则恢复原目标点。对于障碍逃脱策略无法走出的障碍物环境,进一步设计了转向策略,使机器人能成功走出陷阱区域,到达目标点。基于 MATLAB 仿真平台对所设计算法在不同环境下进行了测试和比较。结果验证了所设计算法的可行性和有效性。
二、部分源代码
function [Distance,Flag]=GetMinDistance(DectLineK, DectLineB, DectLineF,PgoalXnew,PgoalYnew)
%Distance 为最短距离,Flag表征其有效性 0 无 1有 2异常
%依据测量线斜率情况及走向 选择出交涉区域的障碍,及夹角取向
global CirX;
global CirY;
global CirR;
global ProbotX;
global ProbotY;
if DectLineF ==1
if ProbotY < PgoalYnew %竖直向上运动
Ydown=PgoalYnew;
Yup =PgoalY;
else
Ydown=PgoalYnew;
Yup =ProbotY;
end
IndexX= ((ProbotX-CirR) < CirX) & (CirX < (ProbotX+CirR));
IndexY= (Ydown < CirY) & (CirY < Yup);
IndexALL=IndexX & IndexY;
elseif DectLineF == 2
if ProbotX < PgoalXnew %水平向右运动
Xleft = ProbotX;
Xright= PgoalXnew;
else
Xleft = PgoalXnew;
Xright= ProbotX;
end
IndexX= (Xleft < CirX) & (CirX < Xright);
IndexY= ((ProbotY-CirR) < CirX) & (CirX < (ProbotY+CirR));
IndexALL=IndexX & IndexY;
else
AngelDectLine=atan(DectLineK);
if DectLineK > 0
if ProbotX < PgoalXnew %正斜率向上运动
Xleft = ProbotX;
Yleft = ProbotY;
Xright= PgoalXnew;
Yright= PgoalYnew;
else %正斜率向下运动
Xleft = PgoalXnew;
Yleft = PgoalYnew;
Xright= ProbotX;
Yright= ProbotY;
end
LineBleft = Yleft + Xleft/DectLineK;
LineBright= Yright + Xright/DectLineK;
Btemp=CirR/cos(AngelDectLine);
Xtemp=CirR*sin(AngelDectLine);
LineBup = DectLineB +Btemp;
LineBdown= DectLineB -Btemp;
X1=Xleft-Xtemp;
X2=Xleft+Xtemp;
X3=Xright-Xtemp;
X4=Xright+Xtemp;
IndexX1= (X1 < CirX) & (CirX < X2);
IndexX2= (X2 < CirX) & (CirX < X3);
IndexX3= (X3 < CirX) & (CirX < X4);
Ytemp=CirX/DectLineK;
Y1=LineBleft-Ytemp; %与斜率垂直的左右两条直线
Y2=LineBright-Ytemp;
Ytemp=CirX*DectLineK;
Y3=LineBup +Ytemp; %与斜率平行的上下两条直线
Y4=LineBdown+Ytemp;
IndexY1= (Y1 < CirY) & (CirY < Y3);
IndexY2= (Y4 < CirY) & (CirY < Y3);
IndexY3= (Y4 < CirY) & (CirY < Y2);
IndexALL=(IndexX1 & IndexY1)|(IndexX2 & IndexY2)|(IndexX3 & IndexY3);
else
if ProbotX < PgoalXnew %负斜率向 下运动
Xleft = ProbotX;
Yleft = ProbotY;
Xright= PgoalXnew;
Yright= PgoalYnew;
else %负斜率向 上运动
Xleft = PgoalXnew;
Yleft = PgoalYnew;
Xright= ProbotX;
Yright= ProbotY;
end
LineBleft = Yleft + Xleft/DectLineK;
LineBright= Yright + Xright/DectLineK;
Btemp=CirR/cos(AngelDectLine); %平行线的截矩
Xtemp=CirR*sin(-AngelDectLine); %注意加负号
LineBup = DectLineB +Btemp;
LineBdown= DectLineB -Btemp;
X1=Xleft-Xtemp;
X2=Xleft+Xtemp;
X3=Xright-Xtemp;
X4=Xright+Xtemp;
IndexX1= (X1 < CirX) & (CirX < X2);
IndexX2= (X2 < CirX) & (CirX < X3);
IndexX3= (X3 < CirX) & (CirX < X4);
Ytemp=CirX/DectLineK;
Y1=LineBleft-Ytemp; %与斜率垂直的左右两条直线
Y2=LineBright-Ytemp;
Ytemp=CirX*DectLineK;
Y3=LineBup +Ytemp; %与斜率平行的上下两条直线
Y4=LineBdown+Ytemp;
IndexY1= (Y4 < CirY) & (CirY < Y1);
IndexY2= (Y4 < CirY) & (CirY < Y3);
IndexY3= (Y2 < CirY) & (CirY < Y3);
IndexALL=(IndexX1 & IndexY1)|(IndexX2 & IndexY2)|(IndexX3 & IndexY3);
end
end
%如果没有找出,机器可直达目标,穿越障碍成功,结束探测
CheckX=CirX(IndexALL);
if isempty(CheckX)
Distance =0;
Flag=0;
return;
end
CirXt=CirX(IndexALL); %此时可能有多个
CirYt=CirY(IndexALL);
CirRt=CirR(IndexALL);
if DProbotToBar < 0 %出现严重异常
Distance =0;
Flag=2;
else
Distance =DProbotToBar;
Flag=1;
end
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
[3]郭娜,李彩虹,王迪,张宁,宋莉.基于模糊控制的移动机器人局部路径规划[J].山东理工大学学报(自 然 科 学 版)
以上是关于路径规划基于matlab模糊控制机器人路径规划含Matlab源码 1643期的主要内容,如果未能解决你的问题,请参考以下文章
路径规划基于matlab A_star算法多机器人路径规划含Matlab源码 1251期
路径规划基于matlab A_star算法机器人走迷宫路径规划含Matlab源码 1332期
三维路径规划基于matlab A_star算法机器人栅格地图三维路径规划含Matlab源码 190期
路径规划基于matlab AI抗疫服务移动机器人路径规划系统含Matlab源码 2096期