点云处理技术之open3d第三篇:点云的高级操作篇——点云边界框凸包DBSCAN聚类平面分割和隐点移除
Posted 非晚非晚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云处理技术之open3d第三篇:点云的高级操作篇——点云边界框凸包DBSCAN聚类平面分割和隐点移除相关的知识,希望对你有一定的参考价值。
本文是 上一篇文章的延续,也是open3d处理点云的高级操作篇。本文将依次介绍open3d如何处理点云边界框、凸包、DBSCAN、RANSCA和隐点移除等操作。
1. 点云边界框
点云几何类型和其他类型一样,也有包围框。当前,open3d实现了两个包围框接口,AxisAlignedBoundingBox 和 OrientedBoundingBox,它们区别如下表所示。同时他们也可以用来裁剪几何图形。
| 函数 | 名称 | 说明 | 图形说明 |
|---|---|---|---|
| AxisAlignedBoundingBox | 轴对齐边界框aabb | 每条边都有平行的轴 |  |
| OrientedBoundingBox | 定向边界框obb | 边和轴有一定的夹角 |  |
import open3d as o3d
import numpy as np
#*******************************包围框***********************************
pcd = o3d.io.read_point_cloud("../test_data/fragment.ply") # 读取ply或者pcd文件
#读取裁剪的文件
vol = o3d.visualization.read_selection_polygon_volume(
"../test_data/Crop/cropped.json")
chair = vol.crop_point_cloud(pcd)#裁剪椅子
# o3d.visualization.draw_geometries([chair]) #显示椅子
aabb = chair.get_axis_aligned_bounding_box() #轴对其包围盒
aabb.color = (1, 0, 0) #红色
obb = chair.get_oriented_bounding_box()
obb.color = (0, 1, 0) # 绿色
o3d.visualization.draw_geometries([chair, aabb, obb],
zoom=0.7,
front=[0.5439, -0.2333, -0.8060],
lookat=[2.4615, 2.1331, 1.338],
up=[-0.1781, -0.9708, 0.1608])

2. 凸包(convex hull)
点云的凸包是包含所有点的最小凸集,open3d实现了计算凸包的方法compute_convex_hull,这个接口的实现基于Qhull。
import open3d as o3d
import numpy as np
#*******************************凸包***********************************
pcd = o3d.io.read_point_cloud("../test_data/fragment.ply") # 读取ply或者pcd文件
# 裁剪点云
vol = o3d.visualization.read_selection_polygon_volume(
"../test_data/Crop/cropped.json")
chair = vol.crop_point_cloud(pcd)
# 计算点云的凸包
hull, _ = chair.compute_convex_hull()
hull_ls = o3d.geometry.LineSet.create_from_triangle_mesh(hull)
hull_ls.paint_uniform_color((1, 0, 0)) #凸包的颜色
o3d.visualization.draw_geometries([chair, hull_ls])
3. DBSCAN聚类
open3d实现了DBSCAN[Ester1996]算法,这是一种基于密度的聚类算法。该算法需要两个参数。
labels = np.array(pcd.cluster_dbscan(eps=0.02, min_points=10, print_progress=True))
- 入参:
- eps: 定义到聚类
相邻点云的距离- min_points: 定义形成聚类所需的
最小点数。
- 出参:
该函数返回一个标签,其中标签-1表示噪音。
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
#*******************************DBSCAN***********************************
pcd = o3d.io.read_point_cloud("../test_data/fragment.ply")
with o3d.utility.VerbosityContextManager(
o3d.utility.VerbosityLevel.Debug) as cm:
labels = np.array(
pcd.cluster_dbscan(eps=0.02, min_points=10, print_progress=True))
max_label = labels.max()
print(f"point cloud has max_label + 1 clusters")
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd],
zoom=0.455,
front=[-0.4999, -0.1659, -0.8499],
lookat=[2.1813, 2.0619, 2.0999],
up=[0.1204, -0.9852, 0.1215])
输出:
[Open3D DEBUG] Precompute neighbors.
Precompute neighbors.[========================================] 100%
[Open3D DEBUG] Done Precompute neighbors.
[Open3D DEBUG] Compute Clusters
[Open3D DEBUG] Done Compute Clusters: 10==========>] 97%
point cloud has 10 clusters

4. RANSAC平面分割
Open3D还支持使用RANSAC从点云分割算法,其中segment_plane用于平面分割算法,该算法的有三个参数:
- distance_threshold:inlier的最大距离阈值
- ransac_n:随机采样的平面点数
- num_iterations:表示最小迭代次数。
import open3d as o3d
pcd = o3d.io.read_point_cloud("../test_data/fragment.pcd")
plane_model, inliers = pcd.segment_plane(distance_threshold=0.01,
ransac_n=3,
num_iterations=1000)
[a, b, c, d] = plane_model
print(f"Plane equation: a:.2fx + b:.2fy + c:.2fz + d:.2f = 0")
# 显示
inlier_cloud = pcd.select_by_index(inliers)
inlier_cloud.paint_uniform_color([1.0, 0, 0]) # inliers为红色
outlier_cloud = pcd.select_by_index(inliers, invert=True)
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud],
zoom=0.8,
front=[-0.4999, -0.1659, -0.8499],
lookat=[2.1813, 2.0619, 2.0999],
up=[0.1204, -0.9852, 0.1215])
输出:
Plane equation: -0.06x + -0.10y + 0.99z + -1.06 = 0

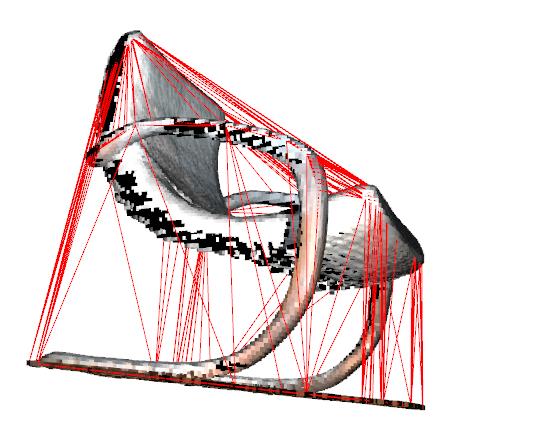
5. 隐点移除(Hidden point removal)
由于点云分辨率的问题,如果你只想看前景点,就需要滤掉背景点。为此,我们可以应用隐藏点移除(Hidden point removal)算法。该方法可以近似的给出一个视角下的可视点云。
import open3d as o3d
import numpy as np
pcd = o3d.io.read_point_cloud("../test_data/fragment.ply") # 读取ply或者pcd文件
diameter = np.linalg.norm(
np.asarray(pcd.get_max_bound()) - np.asarray(pcd.get_min_bound()))
o3d.visualization.draw_geometries([pcd])
print("Define parameters used for hidden_point_removal")
camera = [0, 0, diameter] # 定义用于隐藏点删除的参数,获取从给定视图中可见的所有点,可视化结果
radius = diameter * 100
print("Get all points that are visible from given view point")
_, pt_map = pcd.hidden_point_removal(camera, radius)
print("Visualize result")
pcd = pcd.select_by_index(pt_map)
o3d.visualization.draw_geometries([pcd])
输出:
Define parameters used for hidden_point_removal
Get all points that are visible from given view point
Visualize result
原始视角下的视图:
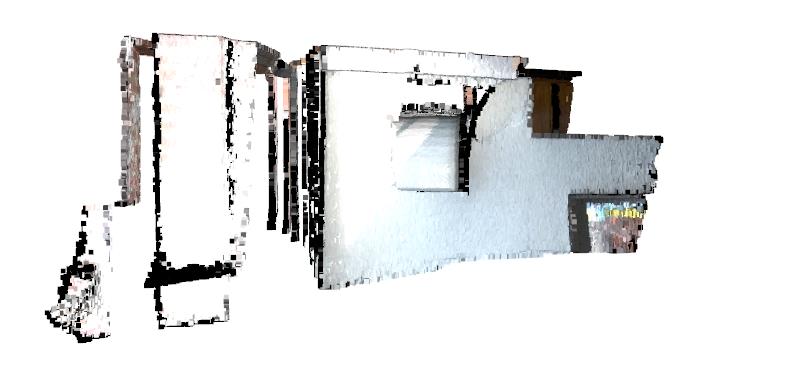
经过隐点移除之后的视图:

以上是关于点云处理技术之open3d第三篇:点云的高级操作篇——点云边界框凸包DBSCAN聚类平面分割和隐点移除的主要内容,如果未能解决你的问题,请参考以下文章