多agv系统调度的MATLAB仿真
Posted fpga&matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了多agv系统调度的MATLAB仿真相关的知识,希望对你有一定的参考价值。
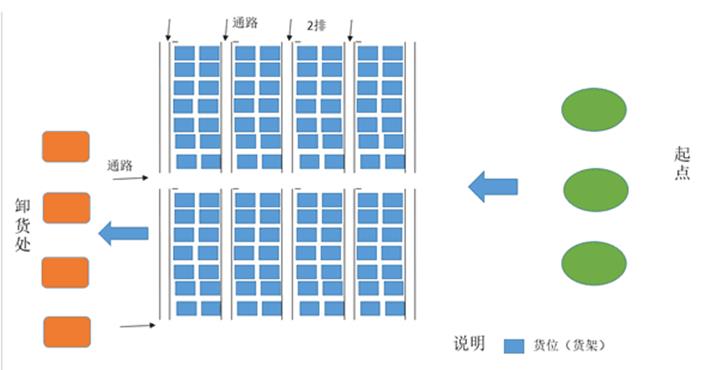
从起点出发,到货物点领取货物最后到卸货点,以完成任务总时间最短为目标进行单目标优化,约束条件为,任务不冲突,路径不冲突,要能实现路径规避 ,4-6台agv一起工作。左右货架间隔可通过1个agv,上下货架间隔可通过两个agv,通道为双向行驶通道。一台agv只能带一个货物,优化目标为完成任务总的时间最短,agv的速度是匀速,转弯也不会减速,取货物时间为固定值。上面的图里面 货物看为正方形 跟agv一样的长度大小,agv试做是跟货物一样大小的正方形agv的速度是每秒1个车身。多台agv一起完成指定任务的时间最短,比如你可以设置三台agv一起取十个左右的货物到终点,使得这个时间最短。那就设置3台agv一起工作 取十个货物到终点 任务不冲突 路径不冲突 这样可以么,十个货物你可以在图片上面随便选。agv完成任务后从终点返回起点的时间和路径可以不计,或者可以把这个时间视作固定值 路径不会跟任务车辆冲突。
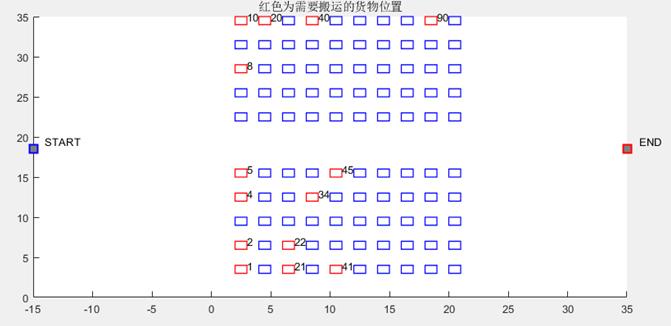
场景的仿真效果如下所示:
优化曲线

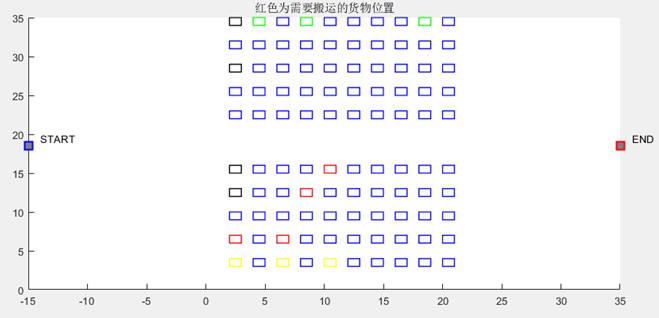
优化后场景如下
部分核心代码:
clc;
clear;
close all;
warning off;
addpath 'func\\'
addpath 'GA\\'
global N2;
global N1;
global W;
global W1;
global W2;
global W3;
global W4;
global V;
global Navg;
global X;
global Y;
global Starts;
global ends;
global Idx;
global Index;
global Xeach;
global Xpos;
global Ypos;
%产生地图
%上下每个区域的行数
N2 = 5;
%左右列数
N1 = 10;
%AGV大小
W = 8;%这个地方不要改,保证坐标都是正数,方便内部计算处理
%左右货架间隔可通过1个agv
W1 = W/4;
%上下货架间隔可通过两个agv
W2 = W/4;
%上下两个区域的间隔
W3 = 2*W;
%货架大小
W4 = W;
%速度
V = 1;
%AVG数量
Navg = 3;
[X,Y,Starts,ends,Idx,Xeach]=func_maps(N1,N2,W1,W2,W3,W4);
% Xeach(1:2:end)=Xeach(1:2:end)-W1/2;
% Xeach(2:2:end)=Xeach(2:2:end)+W4+W1/2;
%选择需要被搬运的货物编号
Index= [1,2,4,5,8,17,23,21,22,34,56,44,45,91];%设置最大值不超过2*N1*N2
Xpos = (X(Index));
Ypos = (Y(Index));
for i = 1:length(Xpos)
idx = find(Xeach==Xpos(i));
if mod(idx,2)==0;
Xpos(i) = Xpos(i)+W4+W1/2;
else
Xpos(i) = Xpos(i)-W1/2;
end
end
figure;
for i = 1:length(X)
tmps = find(Index==i);
if isempty(tmps)==1
rectangle('Position', [[X(i),Y(i)] W4 W4], 'LineWidth', 1, 'EdgeColor', 'b', 'Clipping', 'off');
hold on
else
rectangle('Position', [[X(i),Y(i)] W4 W4], 'LineWidth', 1, 'EdgeColor', 'r', 'Clipping', 'off');
hold on
text(X(i)+1,Y(i)+1,num2str(i));
end
end
plot(Starts(1),Starts(2),'--gs',...
'LineWidth',2,...
'MarkerSize',10,...
'MarkerEdgeColor','b',...
'MarkerFaceColor',[0.5,0.5,0.5]);
hold on
text(Starts(1)+1,Starts(2)+1,'START');
plot(ends(1),ends(2),'--ys',...
'LineWidth',2,...
'MarkerSize',10,...
'MarkerEdgeColor','r',...
'MarkerFaceColor',[0.5,0.5,0.5]);
text(ends(1)+1,ends(2)+1,'END');
title('红色为需要搬运的货物位置');
MAXGEN = 50;
NIND = 200;
Nums = length(Index)+Navg+1; %优化变量数量,含义为N个货物的路线优化变量+每个AVG的搬运数量变量+冲突策略判断
Chrom = crtbp(NIND,Nums*10);
%sh
Areas = [];
for i = 1:length(Index)
Areas = [Areas,[1;length(Index)-i+1]];
end
for i = 1:Navg
Areas = [Areas,[1;length(Index)-Navg+1]];%每个avg最多搬运N-AVG+1个,保证其他的至少可以搬运1个
end
for i = 1:1
Areas = [Areas,[1;2]];%策略4选1
end
FieldD = [rep([10],[1,Nums]);Areas;rep([0;0;0;0],[1,Nums])];
gen = 0;
%计算对应的目标值
A = floor(length(Index)*rand(1,Navg))+1;
S = sum(A);
B = round(A*length(Index)/S);
if sum(B)>length(Index)
[Vbb,Ibb]= max(B);
B(Ibb) = B(Ibb)-(sum(B)-length(Index));
end
if sum(B)<length(Index)
[Vbb,Ibb]= min(B);
B(Ibb) = B(Ibb)+(length(Index)-sum(B));
end
Xxx = [1:length(Index),B,1];%初始值
fobj = func_obj(Xxx);
E = fobj;
Js = E*ones(NIND,1);
Objv = (Js+eps);
gen = 0;
%%
while gen < MAXGEN;
gen
Pe0 = 0.9999;
pe1 = 0.0001;
FitnV=ranking(Objv);
Selch=select('sus',Chrom,FitnV);
Selch=recombin('xovsp', Selch,Pe0);
Selch=mut( Selch,pe1);
phen1=bs2rv(Selch,FieldD);
for a=1:1:NIND
AA = round(phen1(a,1:length(Index)));
AA2 = [];
Index_=Index;
for i = 1:length(AA)
AA2(i)=Index_(AA(i));
Index_(AA(i))=[];
end
BB = floor(phen1(a,1+length(Index):end-1))+1;
S = sum(BB);
BB2 = round(BB*length(Index)/S);
if sum(BB2)>length(Index)
[Vbb,Ibb]= max(BB2);
BB2(Ibb) = BB2(Ibb)-(sum(BB2)-length(Index));
end
if sum(BB2)<length(Index)
[Vbb,Ibb]= min(BB2);
BB2(Ibb) = BB2(Ibb)+(length(Index)-sum(BB2));
end
CC2 = round(phen1(a,end));
X1 = [AA2,BB2,CC2];
%计算对应的目标值
[fobj,pathall] = func_obj(X1);
E = fobj;
JJ(a,1) = E;
XXa = X1;
pathallXa = pathall;
end
Objvsel=(JJ);
[Chrom,Objv]=reins(Chrom,Selch,1,1,Objv,Objvsel);
gen=gen+1;
%保存参数收敛过程和误差收敛过程以及函数值拟合结论
Error(gen) = mean(JJ);
end
clc;
figure;
plot(Error,'linewidth',2);
grid on
xlabel('迭代次数');
ylabel('遗传算法优化过程');
[V,I]=min(JJ);
XX_best = XXI;
pathall_best = pathallXI;
idxx = XX_best(1:length(Index));
Nums = XX_best(1+length(Index):end-1);
Color1='r';
Color2='k';
Color3='g';
Color4='y';
Color5='m';
Color6='c';
%显示每个avg搬运的货物编号
S1=0;
E1=0;
for j = 1:length(Nums)
if j == 1
S1=E1+1;
E1=S1+Nums(j)-1;
selj=idxx(S1:E1);
else
S1=E1+1;
E1=S1+Nums(j)-1;
selj=idxx(S1:E1);
end
selj
end
A-06-68
以上是关于多agv系统调度的MATLAB仿真的主要内容,如果未能解决你的问题,请参考以下文章