传感网应用开发知识点总结
Posted 程序小鹿
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了传感网应用开发知识点总结相关的知识,希望对你有一定的参考价值。
传感网应用开发知识点总结
1+X职业技能等级证书-传感网应用开发
一、数据采集
1、模拟量数据采集
- 模拟量是指在时间上和数值上都是连续的物理量;
- 光电传感器的理论基础为光电效应,光电效应可以分为外光电效应、内光电效应和光生伏特效应。
- 外光电效应:在光线的作用下,物体内的电子逸出物体表面向外发射;
- 内光电效应:在光线的作用下,电子吸收光子能量从键合状态过渡到自由状态,又称光导效应。例如光敏电阻器件;
- 光生伏特效应:在光线的作用下,能够产生一定方向的电动势。例如光敏二极管型器件;
- 光敏电阻的主要参数有:
- 光电流、亮电阻:在一定外加电压和光照下,流过的电流为光电流,外加电压和光电流之比为亮电阻,常用“100lx”表示。
- 暗电流、暗电阻:在一定外加电压和没有光照下,流过的电流为暗电流,外加电压和光电流之比为暗电阻,常用“0lx”表示。
- 灵敏度
- 光谱特性
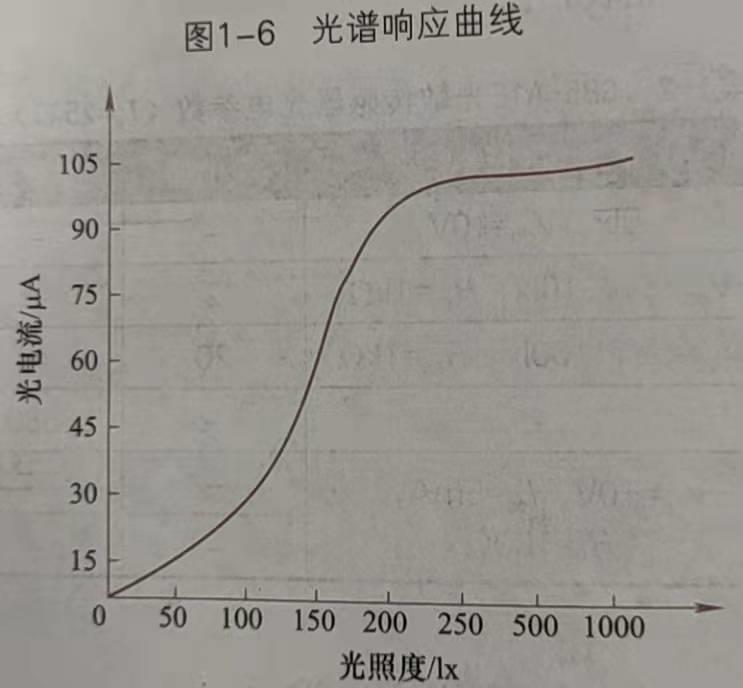
- 光照特性
- GB5-A1E光敏传感器,光照特性曲线显示,当光线逐渐增强是,光电流值先迅速变大,再缓慢变大。
- 气敏传感器分为电阻型气敏器件和非电阻型气敏器件:
作用原理:主要是半导体与气体相互作用是产生表面吸附或反应,引起载流子运动为特征的电导率或伏安特性或表面电位的变化。
- 电阻型气敏器件按结构可以分为烧结型、薄膜型、厚膜型三种;
- 烧结型气敏器件通常使用直热式和旁热式两类工艺;
- 典型气敏器件TGS813可燃气体传感器(轻微发烫)、MQ-135和TGS2602空气质量传感器。
- 将模拟量转换为数字量的器件,称为模-数转换器(ADC),将数字信号转换为模拟信号的电路称为数-模转换器(DAC)。
模数转换过程中包括采样、保持、量化和编码四个过程
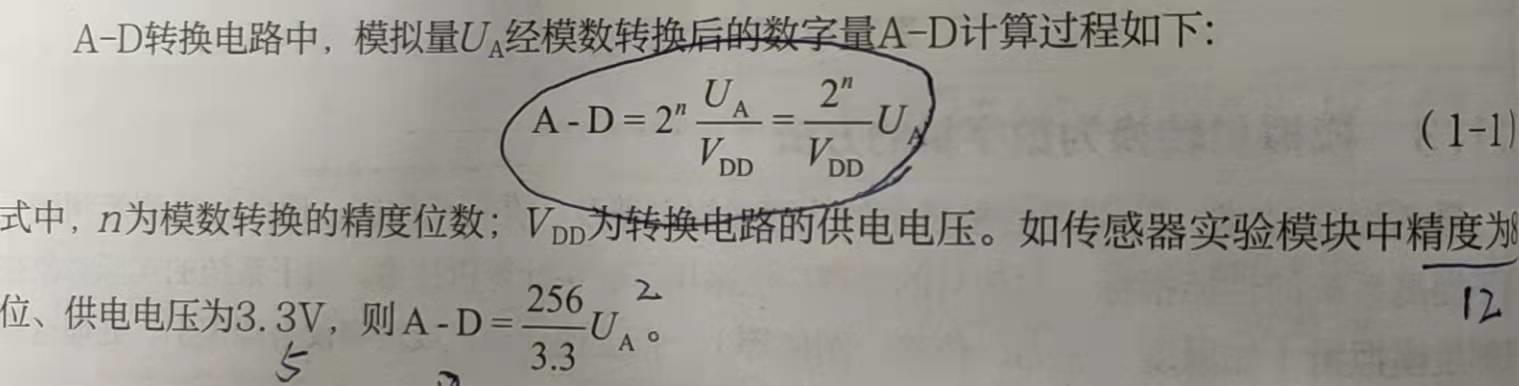
A-D转换器的主要性能指标:
- 分辨率:一般来说A-D位数越多,其分辨率越高;
- 量化误差
- 转换时间:完成转换需要的时间,有高速、中速、低速;
- 绝对精度
- 相对精度
转换公式:
2、数字量传感器数据采集
- 数字量是在时间和数值上都是不连续的(离散),其数值有一串0和1组成的二进制代码串。
- 温度传感器可以按体积热膨胀、电阻变化、温差电现象、磁导率变化、压电效应、超声波传播速度、晶体管特性变化、晶闸管动作特性变化、热和光辐射9个工作原理分类。
- 热敏电阻按电阻温度特性分为负温度系数热敏电阻、正温度系数热敏电阻和临界温度热敏电阻三大类。
- 负温度系数热敏电阻(NTC):电阻值随着温度的升高呈线性减小;
- 正温度系数热敏电阻(PTC):超出一定温度时,电阻值随着温度的升高呈阶跃性的增高;
- 临界温度热敏电阻(CTR):电阻值随温度的增加急剧减小,具有很大的负温度系数;

- 热电偶可以直接测量温度,并把温度信号转换为热电动势信号,通过电气仪表转换成被测介质的温度。
热电偶原理:当有两个不同的导体组一个回路时,只要两节点处的温度不同,回路中就产生一个热电动势,该电动势的大小和方向与导体的材料及两接点的温度有关,并称为热电效应。
- 常用补偿导线法、冷端温度校正法、冷端恒温法、自动补偿法这四种方法对冷端进行温度补偿;
- SHT11温湿度传感器通过二线数字串行接口(2-wire)来传输数据,与I2C协议不兼容。
3、开关量传感器数据采集
- 开关量传感器数据可以对应于模拟量传感数据的“有”和“无”,也可以对应于数字量传感数据的“1”和“0”两种状态。
- 红外信号数据采集的有红外光电传感器、人体感应型红外传感器;
- 人体感应型红外传感器可以探测人体红外热辐射,主要由透镜、红外热辐射感应器、感光电路组成(不包括控制电路)
- Flame-1000-D火焰传感器能够探测波长为700~1100nm的短波近红外线。
- 数字输出:当检测到火焰输出高电平,没有检测到火焰时输出 低电平;
- 模拟输出:输出端电压随着火焰强度变化而改变;
- 常用的声传感器按原理分电容式、压电式和电动式三种类型。
- MP9767型号是声音传感器直接输出开关量信号。
- 声音信号采集器件的性能通常还与其尺寸有关,尺寸大的一般不具有较宽频率范围。
二、STM32微控制器基本外设应用开发
STM32重要知识点总结
- STM32微控制器基于ARM Cortex-M0,M0+,M3,M4和M7内核,这些内核是专为高性能、低成本和低功耗的嵌入式应用开发的。
- STM32微控制器的命名规则:
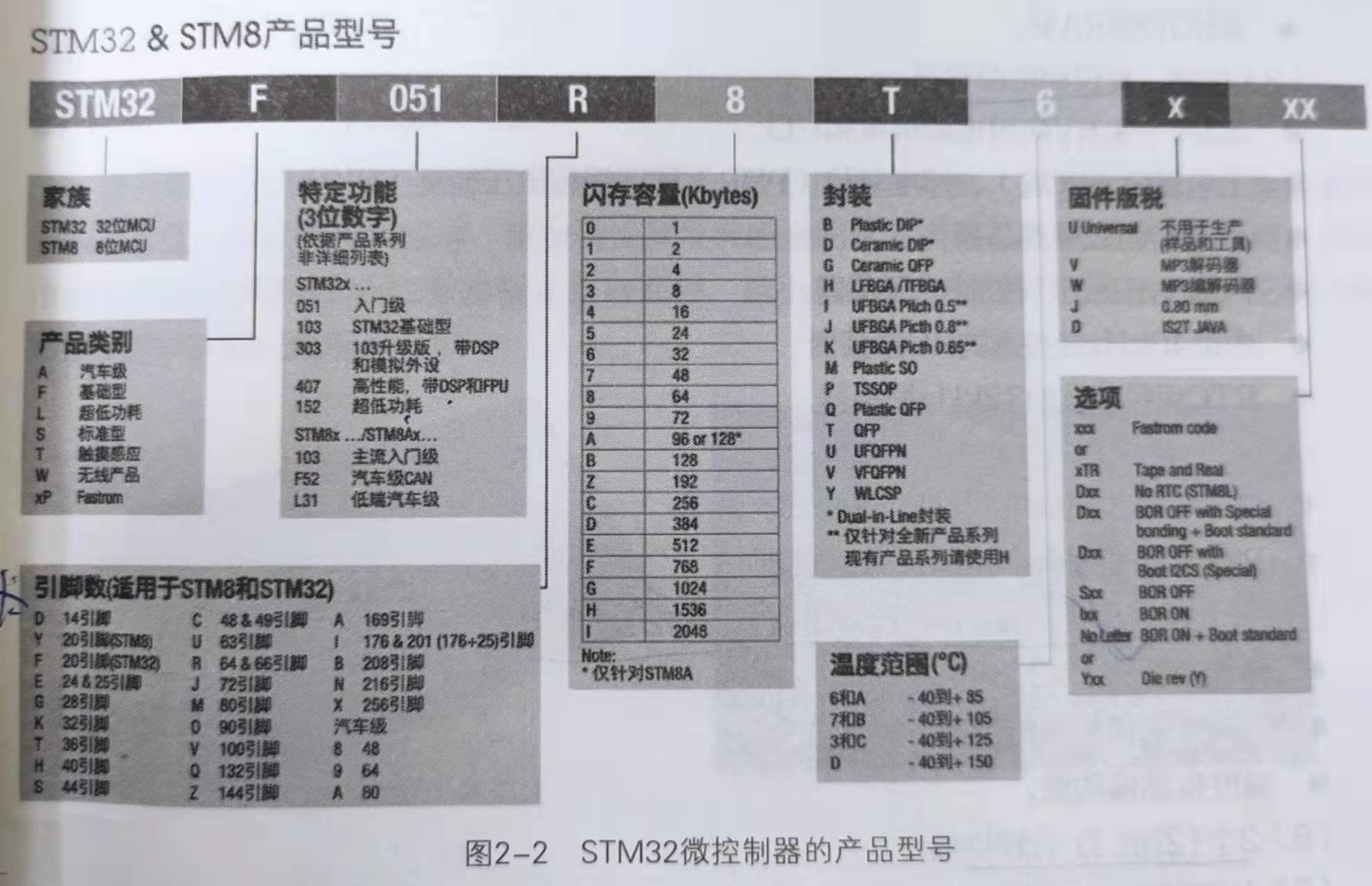
- STM32F103VET6 微控制的主要特性:
- 32位ARM Cortex-M3内核CPU,采用v7架构;
- 最大工作频率为72MHz,其APB2总线的时钟频率为72MHz,APB1总线的频率为32MHz;
- 具有3个12位的A-D转换器;
- 支持10个系统异常中断和60个可屏蔽中断,具有16级可编程中断优先级;
- 外部中断、事件控制器(EXTI)支持19个中断/事件请求;
- 处理中断的设备为NVIC,中断优先级分为抢占优先级和子优先级,中断优先级数值越大,则优先级越高;
- 具有11个定时器,其中TIM1、TIM8为高级定时器具备输入捕获、输出计较通道功能同时具有互补输出功能,TIM6不具备输入捕获、输出计较通道功能;
- STM32有基于寄存器、标准外设库、STM32Cube的HAL库三种开发模式。
- GPIO被分成5组A-E,每组有16个引脚,每个引脚可以对应一个EXTI中断,但必须设置为输入模式才能使用。
- GPIO_Mode_Out_PP 推挽输出(带上拉或者下拉): IO 输出 0-接 GND, IO 输出 1 -接 VCC。
- GPIO_Mode_AF_PP 推挽复用输出(带上拉或者下拉):
- GPIO_Mode_Out_OD 开漏输出(带上拉或者下拉):要得到高电平状态需要上拉电阻才行,可以作为电流型驱动
- GPIO_Mode_AF_OD 开漏复用输出(带上拉或者下拉):复用功能,不只是单纯的作为输入输出,可以作为其他功能的引脚:串口、I2C、SPI,要得到高电平状态需要上拉电阻才行
- GPIO_Mode_IPU 上拉输入: 将IO口作为通用输入接口,只能输入0或者1,强制下拉,一般是为了输入强高电平
- GPIO_Mode_IN_FLOATING 浮空输入 :复位上电的时候,引脚不确定电平的高低
- GPIO_Mode_AIN 模拟输入:将IO口作为模拟输入接口,输入的可能是变化的值,接收外部的模拟信号输入
- GPIO四种最大输出速度:2MHZ、25MHZ、50MHZ、100MHZ
- 定时器的计数器主要由TIMx_CNT计数寄存器和TIMx_PSC预分频器寄存器组成:
-
STM32Cube配置时钟树如下:
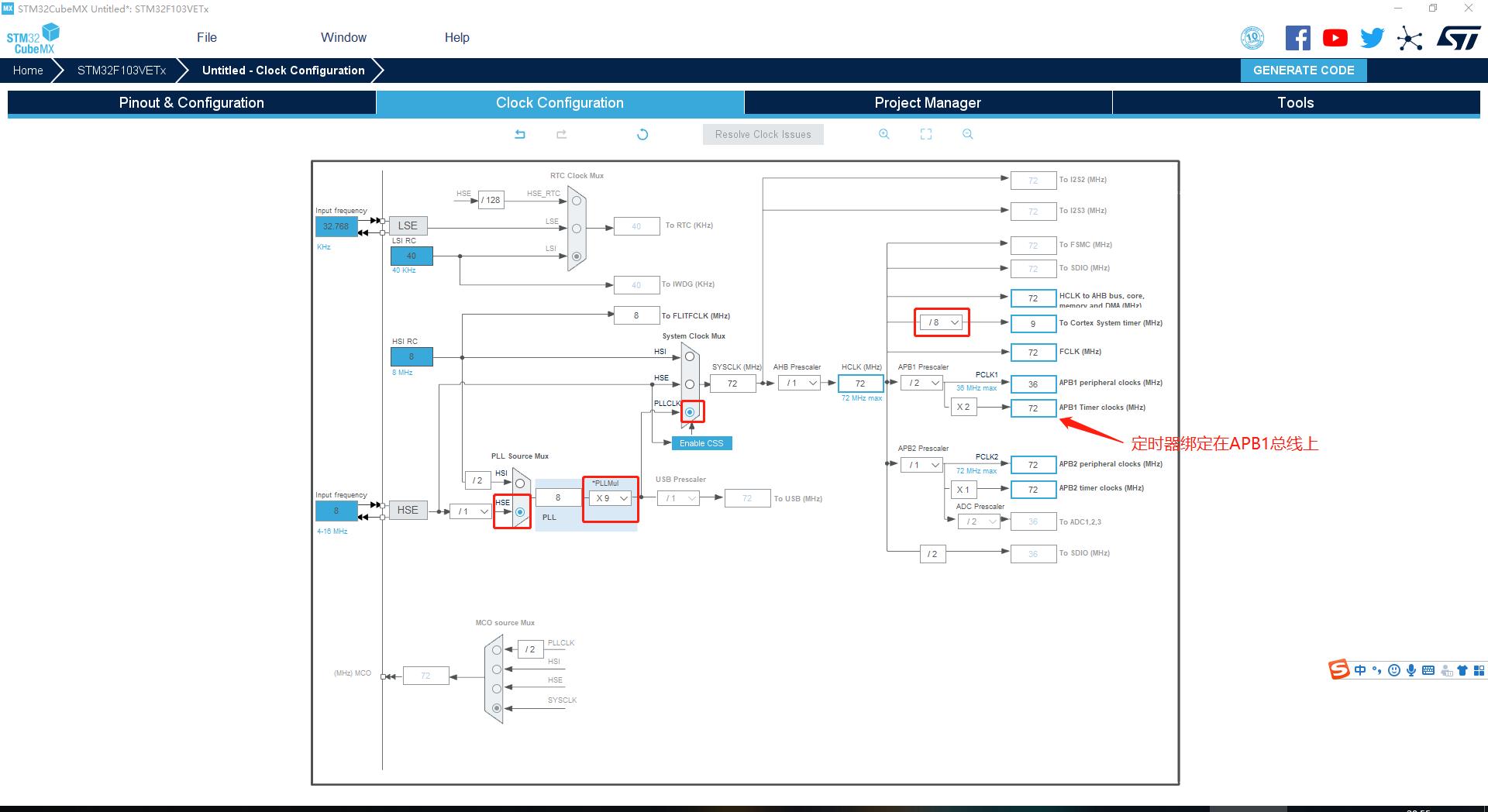
-
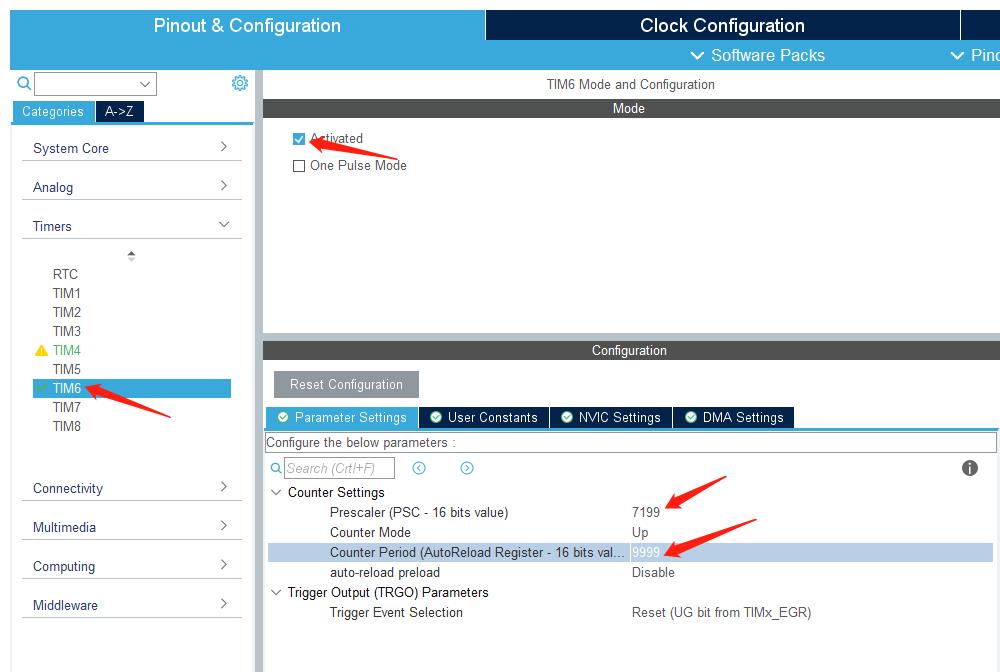
配置定时器定时为1s的计算公式:
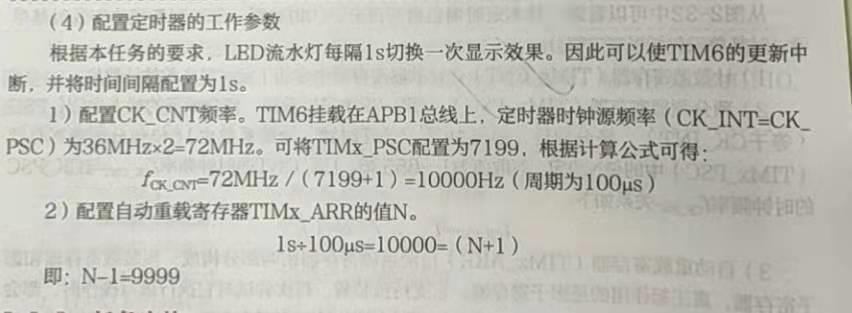
1s = 1 * 10^6 us = 72*10^6 / (PSC+1) * (N+1) ,设置PSC为7199算出来的时间为100us,所以N设置为9999.
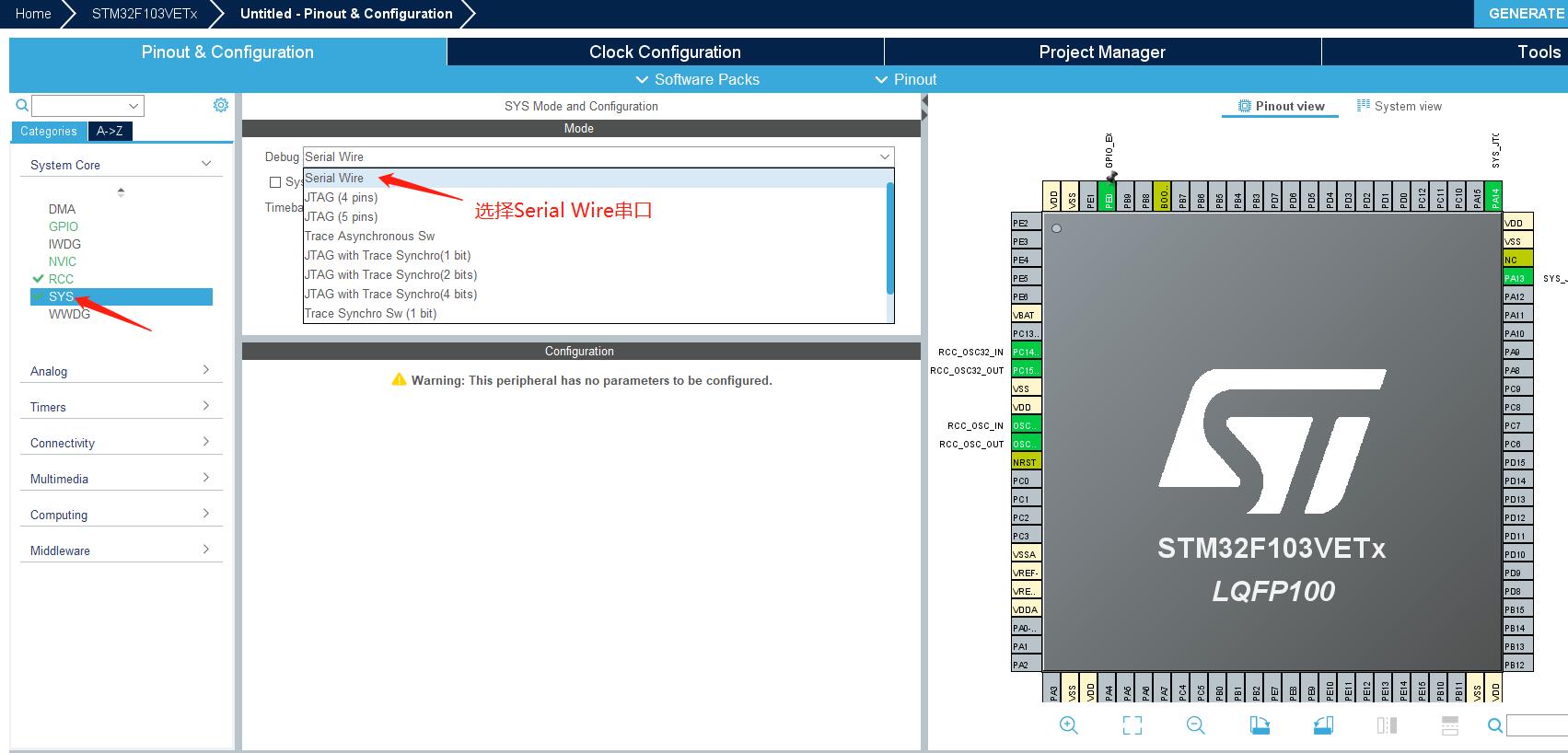
- STM32Cube配置流程:
-
M3模块选择STM32VETx芯片,LoRa选择STM32l151c8Tx芯片
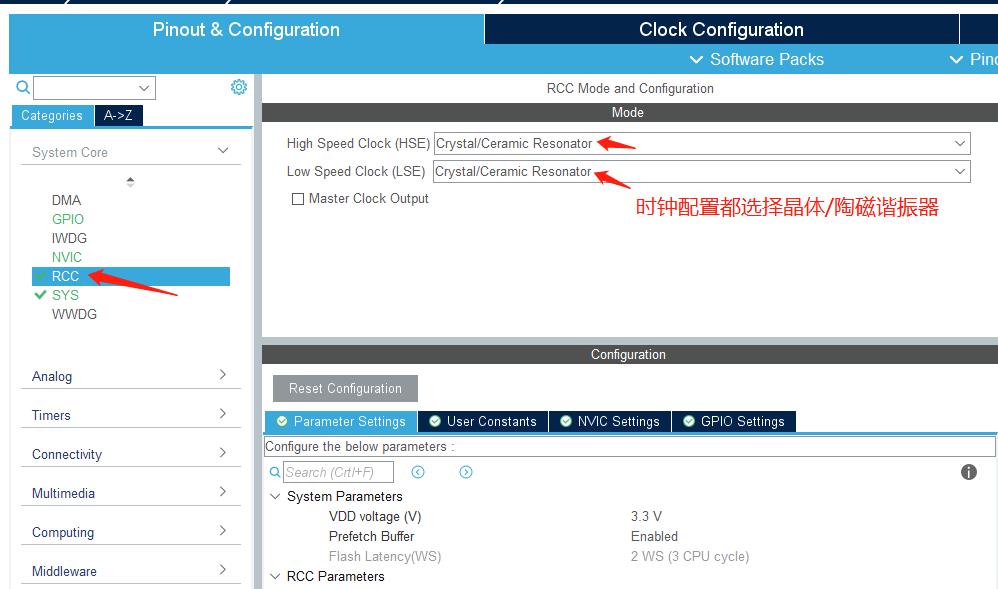
-
配置时钟
-
开始中断,配置抢占优先级和子优先级:

-
如果需要配置串口USART2为异步通信,波特率为115200如下图
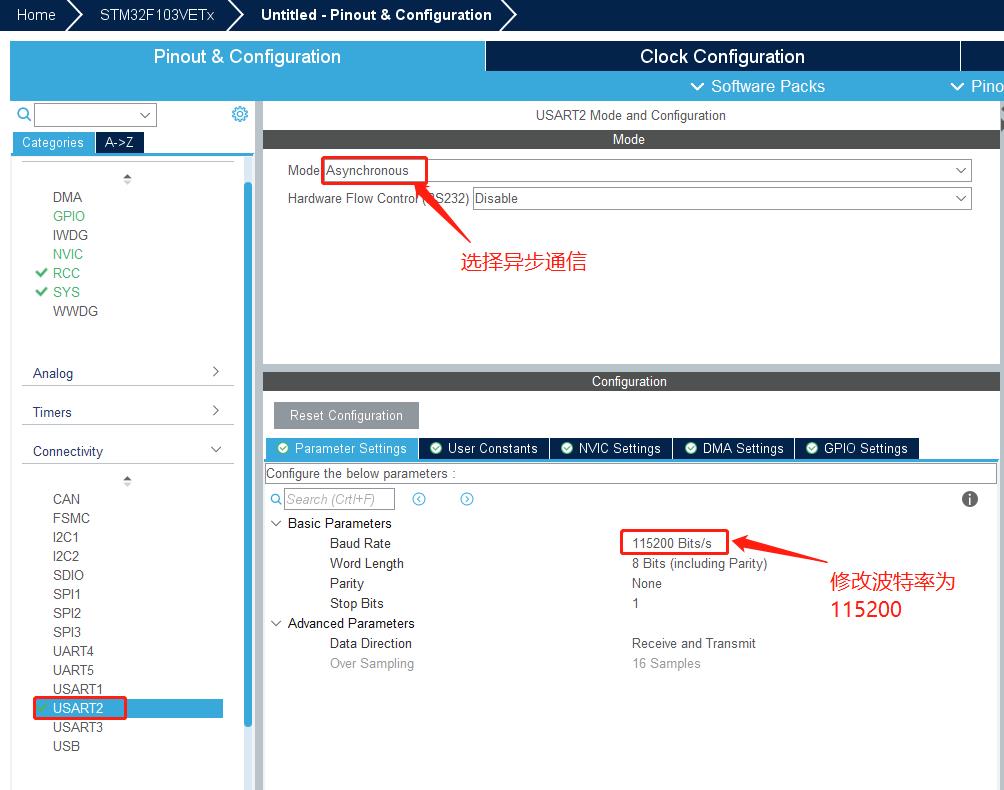
-
配置TIM6定时为1s:
注意:1、使用STM32CubeMX时,软件提示更新不要更新资源包,因为下载的资源包服务器在外国,下载很慢并可能软件出现宕机;2、创建工程时,不要出现中文路径和命名,易出现玄学的问题!
三、RS-485总线通讯应用
RS-485总线重要知识点
- 串行通信是指外设和计算机之间,通过数据信号线、地线与控制线等,按位进行传输数据的一种通信方式。
- 目前常见的串口接口标准有RS-232、RS-422和RS-485等。另外,SPI(串口外设接口)、I2C(内置集成电路 )和CAN(控制器局域网)通信属于串行通信。
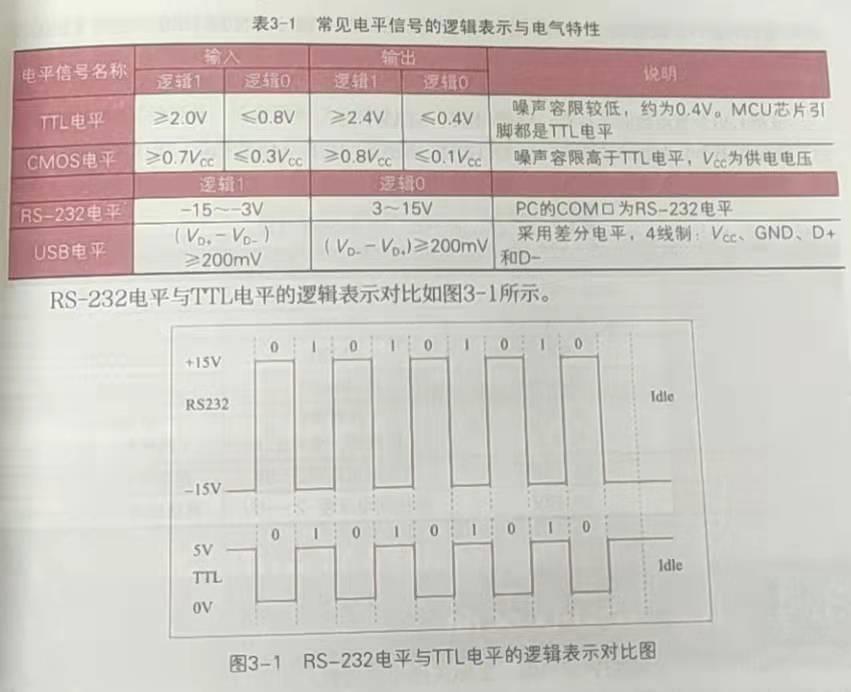
- 常见的电平信号有TTL电平、CMOS电平、RS-232电平与USB电平等。
- 它们对于逻辑“1”和逻辑“0”的表示标准有所不同:
- RS-232、RS-442、RS-485标准比较:

- Modbus协议是工业控制领域应用十分广泛的一种应用层通信协议,有施耐德电气公司开发的。
- Modbus有基于串行链路的版本、基于TCP/IP的网络版本以及基于其他互联网协议的网络版本,其中前两者在实际场景应用较多。
- Modbus协议有两种传输模式,分别为Modbus RTU与Modbus ASCLL:
- RTU是一种紧凑的、采用二进制数据表示对方式,采用循环冗余校验方式;
- ASCLL表示方式更加冗长,采用纵向冗余校验方式以(冒号):为起始帧;
- Modbus标准规定了3类Modbus功能码:公共功能码、用户自定义功能码和保留功能码。
- Modbus协议报文组成:从设备地址 + 功能码 + 寄存器地址 + 寄存器数量 + CRC校验。
- 当发送或者接收数字量(01,02)时,请求报文的寄存器数量需要化简成十进制才知道响应报文数据域字节数。
如需了解Modbus协议可到RS485网络的Modbus协议帧
四、CAN总线通讯应用
1.CAN基础知识
- CAN(控制局域网)由德国Bosch公司于1983年开发出来的。
主要特性:数据传输距离远(远达10km),数据传输速率达1Mbit/s具备数据自动重发功能和错误检测和处理功能。 - 现有ISO 11519标准的低速通信应用场景(125kbit/s以下),ISO 11898标准的高速通信应用场景(125kbit/s ~1Mbit/s),均属于应用层协议。
- 数据链路层,两个协议定义的内容一样;
- 物理层,两个协议定义的内容不同;
- ISO 11519和ISO 11898均使用差分信号进行传输数据;
- ISO 11898 高速标准应用于汽车与传动系统,它是闭环网络,最大长度为40m,要求两端有一个120Ω的电阻;ISO 11519低速标准应用于汽车车身系统,它的两根总线是独立的,不形成闭环,要求每根线各串联一个2.2kΩ的电阻
- 静态时两条线差分电压为0v时,表示逻辑1(隐性电平),差分电压为2v时,表示逻辑0(显性电平)

- CAN常用双绞线、同轴电缆和光纤作为传输介质。
- 在总线仲裁时,“显性”状态可以支配“隐性”状态,说明显性具有优先权。
- 光纤CAN网络可拓扑的网络结构有总线型、环形、星型。
2.CAN通信帧类型
- 数据帧 :用于发送单元向接收单元传送数据;
- 数据帧 :用于接收单元向具有相同ID的发送单元请求数据;
- 错误帧 :用于检测出错误时向其他单元通知错误;
- 过载帧 :用于接收单元通知发送单元其尚未做好接收准备;
- 帧间隔 :用于将数据帧及遥控帧与前面的帧分离开;
- 标准帧的仲裁段由11bit的标识符和RTR(远程发送请求)位构成。
- 数据帧由帧起始、仲裁段、控制段、数据段、CRC段、ACK段、帧结束组成
- 仲裁段 :表示帧优先级的段,标准帧的仲裁段由11bit的标识符ID和RTR位构成,扩展帧的仲裁段由29bit的标识符ID、SRR位、IDE位和RTR位构成;
- CRC段 :用于检查帧传输是否错误的段,它由15bit的CRC序列和1bit的CRC界定符、构成;
3.CAN控制器与收发器
- STM32系列微控制集成了BxCAN控制器:
- 含有三个发送邮箱,其发送优先级可配置;
- 含两个具有三级深度的接收FIFO,其上溢参数可配置;
- 含有初始化、正常和睡眠三种工作模式;
- CAN收发器主要将CAN控制器的“逻辑电平”转换为“差分电平”,并通过CAN线发送出去。
- 主要有通用CAN收发器、隔离CAN收发器、高速CAN收发器、容错CAN收发器四种收发器
- CAN网络标准格式数据帧的构成:
- 帧ID + 帧类型 + 标识符ID类型IDE + 保留位 + 数据长度 + 数据段
- 举例:0x12 0 0 0 08 Data[0]~Data[7]
- 其它网络数据帧参考网络协议报文详解
五、基于BasicRf的无线通信应用
BasicRf重要知识点
- 基于CC253x芯片的BasicRf软件包,包括硬件层、硬件抽象层、基本无线传输层和应用层,不包括数据交互层,ZigBee技术体系不包括传输层。
- 两个通信模块的“网络ID”和“通信信道”要一致,否则无法通信。
- 自己创建CC250的IAR工程时,需要三步走才能成功编译,右击项目option配置General Options、Linker、Debugger,如需要移植驱动配置工程路径:
- P R O J D I R PROJ_DIR PROJDIR\\ 代表当前工程文件说真的workspace;
- …\\ 表示对应目录的上一层;
- 创建模块更容易工程的管理;
- CC2530总共有21个I/O引脚,具有P0、P1、P2这3个8位引脚,P2仅有5位可以使用:
- 初始化引脚的功能是需要设置PxSEL功能寄存器(0代表GPIO,1代表外设I/O)、PxDIR方向寄存器(0:输入,1:输出)默认所有位为0;
- PxINP寄存器设置引脚的输入模式(0为上拉/下拉(再通过P2INP寄存器0为上拉,1为下拉),1位三态);
- 有5个定时器,工作模式有自由运行模式、模模式、正计数/倒计数三种工作模式,与定时器有关的寄存器有TxCTL、TIMIF…
- 12位分辨率的A-D转换器,ADC相关的寄存器有ADCL、ADCH、ADCCON1、ADCCON2、ADCCON3、APCFG、ATEST;
- 两个串行通信接口,能够应用于异步和同步模式,相关寄存器有UxCSR(控制和状态寄存器)、UxUCR(UART控制寄存器)、UxGCR(通用寄存器)、UxDBUF(缓冲寄存器)、UxBAUD(波特率控制寄存器),x为编号
设置波特率为UxBAUD寄存器,UxGCR寄存器
例如设置USART0波特率为115200 ,U0BAUD = 216;U0GCR = 11;
参考下表: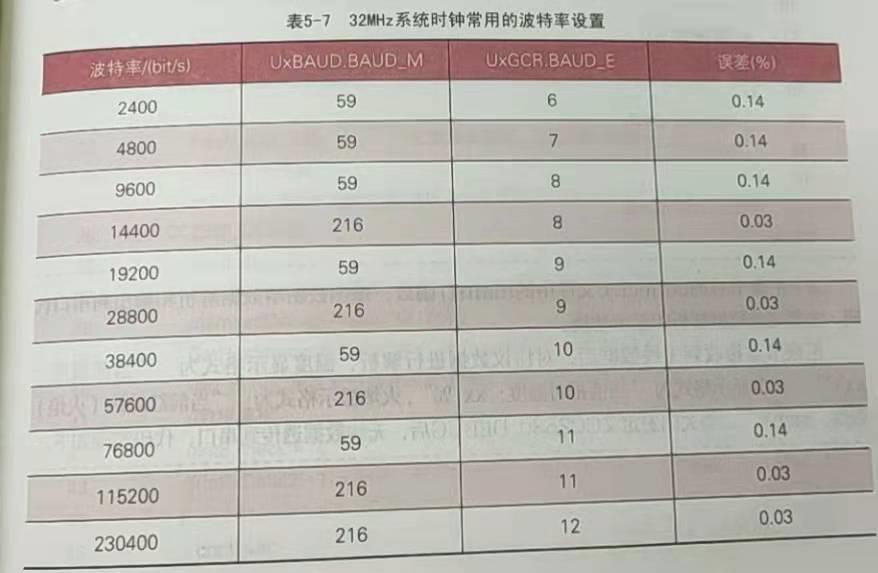
- CC2530只有P0_0、P0_1有20mA驱动能力,其它引脚都是4mA的驱动能力。
- 中断向量是中断处理函数的入口地址,进入后要手动清除中断标志位。
- CC2530单片机串口引脚输出信号为TTL信号。
六、Wi-Fi数据通信
Wi-Fi重要知识点
- WiFi属于短距离无线技术,同蓝牙相比,它具备更高的传输速率。
- 802.11ax理论上的最大传输速率为10Gbit/s,单用户速率提高不多,它的优势是在多用户、高并发场合提高传输速率。
- 2.4G的WiFi划为14个频段,每个频道的带宽为20-22MHz,不同的调制方式带宽稍微不同。
- 常见的WiFi加密方式有WEP、WPA、WPA2,目前最安全的加密方式是WPA2。
- ESP8266支持三种工作模式:station(客户端)、soft-AP(路由器)、station-soft-AP模式。
- AT指令,通过串口发送:
- AT + CWMODE = 1(station)、2(soft-AP)、3(station+soft-AP模式);
- AT + CWDHCP = 0(AP)、1(station)、2(station+soft-AP模式) ,1(开启DHCP功能);
- AT + RST :重启模组;
- AT + CWSAP =“热点名称”、“热点密码”、热点信道、热点加密方式;
例如:AT + CWSAP-CUR =“test”、“12345678”、5、3 - AT + CIPIP = “IP地址”(配置当前使用的IP地址,即网关的地址);
- AT + CIPMUX =1 (启动AP多连接);
- AT + CIPSERVER = 1,8080(启动模块服务器模式,并设置端口为8080);
- AT + CIFSR : 查询模块的IP地址和MAC地址;
- AT + CWLAP :扫描当前可用的AP列表;
- AT + CWJAP = “热点名称”,“热点密码”
- AT + CWQAP : 断开现在热点连接的指令;
- AT + CIPSTA : 查看EPS8266模块当前获取到的IP地址;
- AT + CIPSTART = “TCP”,“120.77.58.34”,8600(连接云平台IP地址端口号);
- AT + CIPSEND = 91(发送握手认证,先发送数据长度,再独立发送数据);
- AT + CIPSEND = 7 (心跳响应,成功连接云平台)
- 每个频道至少要相差4MHz以上才不互相干扰。
七、NB-IOT联网通信
1、NB-IOT基础知识
- NB-IOT(窄带物联网)是一种全新的蜂窝物联网技术,是3GPP组织定义的,基于授权频谱的运营。
- 3GPP(第三代合作伙伴计划)的成员包括中国通信保准化协会(CCSA),日本无线工业及商贸联合会(ARIB),美国电信行业解决方案联盟等
- 物联网通信技术包括短距离距离无线通信技术和长距离无线通信技术:
- 短距离无线技术有ZigBee、Wi-Fi、Bluetooth、Z-wave等;
- 长距离无线通信技术有电信CDMA、移动及联通的3G、4G无线蜂窝网通信和低功耗广域网(LPWAN);
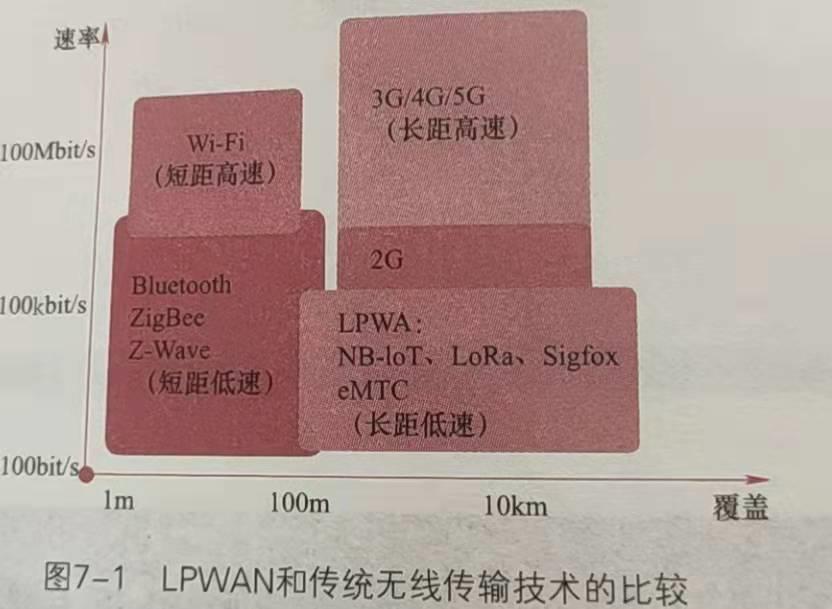
- LPWAN(低功耗广域网),用于物联网低功率的远距离的通讯:
- 覆盖范围广、终端节点功耗低、网络结构简单、运营维护成本低;
- 工作在非授权频段有LoRa技术和Sigfox等,分别有美国的Semtech和法国的Sigfox研发,但目前Sigfox没有在国内取到频段;
- 工作在授权频段的技术有NB-IOT、EMTC等;
- NB-IOT 具备以下四大优点:
- 广覆盖
- 低功耗
- 低成本
- 大连接
- NB-IOT可以在不同的无线频带上进行部署,占有180kHz带宽!,支持独立部署、带内部部署和保护带部署
2、利尔达NB-IOT模组介绍
- 常见的模组有NB86-G、BC28、BC95等
- 内嵌IPv4、UDP、COAP、LwM2M等网络协议栈。
- NB86-G模块有连接态、空闲态、节能模式三种工作模式
- 连接云平台时通信协议选择:LWM2M;
3、利尔达NB-IOT模组的AT指令
NB-IoT AT 指令如下表7-10: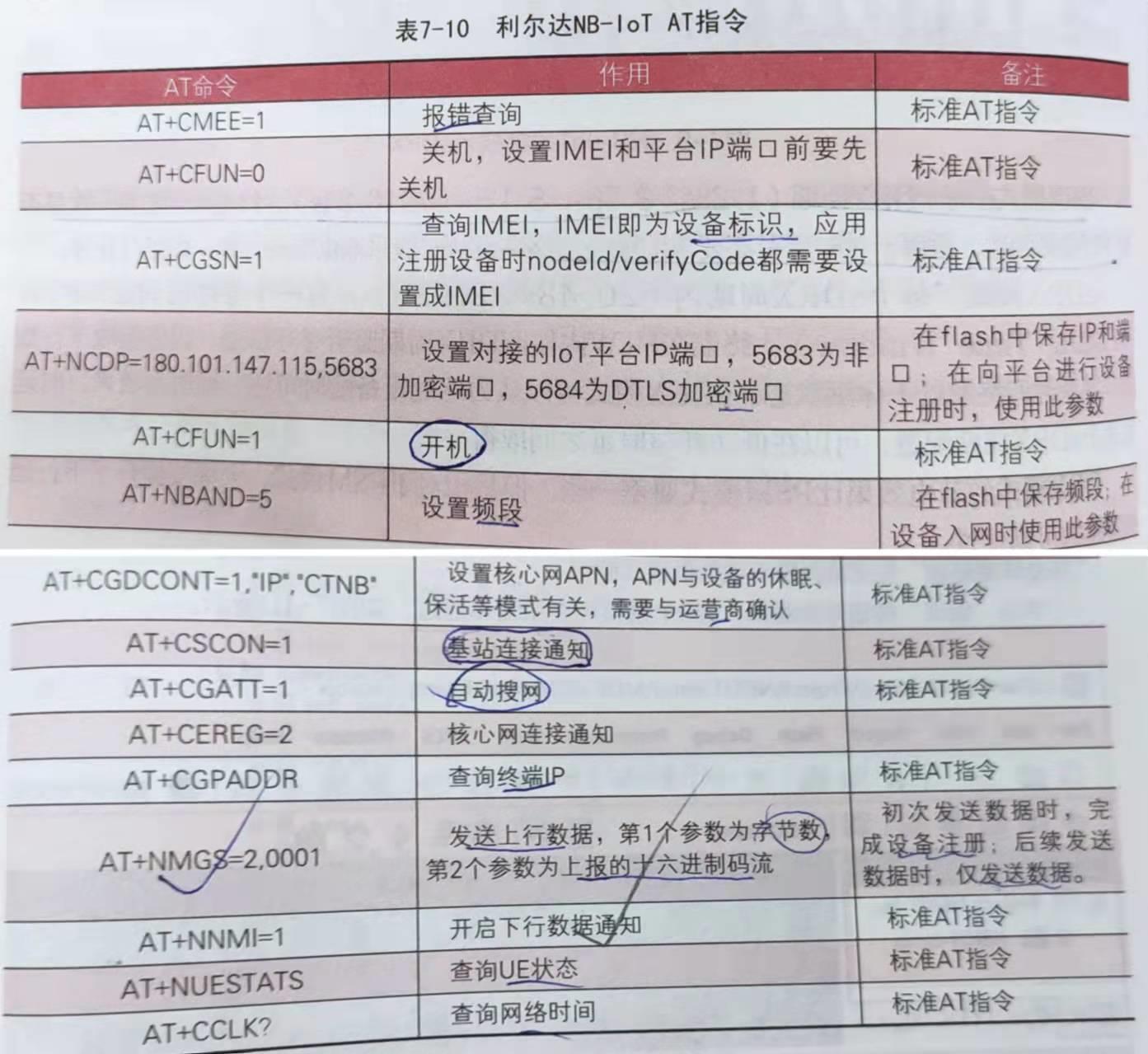
八、LoRa通信应用开发
LoRa重要知识点
- LoRa(远距离无线电)是一种基于扩频技术的远距离无线传输技术,是Semtech公司创建的,是LPWAN通信技术的一种,只要在ISM频段运行,包括433MHz、868MHz、915MHz等。
- LoRa是LoRaWAN的一个子集,LoRa仅包括物理层定义,LoRaWAN还包括了链路层。
- 采用的是LSD4RF-2F717N30是LoRa SX1278 470M100mW标准模块,基于Semtech射频集成芯片SX127X的射频模块,是一款高性能物联网无线收发器。
- SX1276/77/78 是137~1020MHz低功耗远距离收发器,主要采用LoRa远程调制解调器,用于长距离扩频通信,抗干扰强,能够最大程度减低功耗。
- LoRa芯片与MCU通过SPI进行通信,有摩托罗拉公司开发的高速全双工同步串行通信协议(一主多从)。
- SCLK(Serial Clock):串行时钟,由主机发出;
- MOSI(Maser Output,Slave Input):主机输出从机输入信号,由主机发出;
- MISO(Master Input,Slave Output):主机输入从机输出信号,由从机发出;
- NSS(Slave Selected):选择信号,由主机发出,一般是低电位有效。
- LoRa芯片的信号发射功率由参数TX_OUTPUT_POWER设置,这个值越大,发射功率越大,传输距离越远,最大值不得超过20dBm。
- 扩频因子“LoRA_SPREADING_FACTOR”取值6~12,扩频因子常取6、12,这个值越大,传输距离也越远,但是导致传输速率下降。
- 同一个网络中的设备拥有相同的网络ID,而不同的设备的地址在这个LoRa网络中必须唯一,设备地址取值范围1~255。
- 除了软件上使用网络ID区分不同LoRa无线网络外,还能利用不同载波频率配以合适的带宽来降低无线信号干扰:
- 改变LoRa的频率,范围控制在433MHz进行小范围的波动;
- 改变LoRa的带宽,0->125kHz、 1->250kHz 、2->500kHz ,LoRa其它参数固定时,带宽越大,信号能量密度越小,LoRa无线通信距离越短;带宽越小,信号能量密度越大,LoRa无线通信距离越远;
- 移植工程时,需要“Define”文本框中添加预编译符号,添加对应目录的路径和.C源文件。
- LoRa的调制速率(Rs) = 带宽(BW)/ 2^扩频因子(SF) 。
以上是关于传感网应用开发知识点总结的主要内容,如果未能解决你的问题,请参考以下文章