HAL库控制PS2手柄
Posted GG~~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了HAL库控制PS2手柄相关的知识,希望对你有一定的参考价值。
吐槽一下
最近买了个ps2手柄,结果买家发的例程全都是好几年前的库函数版本,尝试移植基本没啥可能。虽然PS2手柄已经被开发很久了,不过我看网上用hal库来写控制的很少,例程也都是用库函数写的,因此写篇文章来帮助刚开始接触PS2又懒得用库函数的同学。
SPI通信协议
提一下,方便理解代码
这个已经被破解很久了,具体的时序就这样。PS2手柄开启,接收器正常工作并接受以后,数据可以通过spi通信来发送接受,然后就可以通过单片机来完成数据接收和发送。
- SPI, serial peripheral interface, 串行外围设备接口。高速的,全双工的,同步通信总线。有四个引脚。需要注意的是,可能有的人被串口通信坑过,于是就把主机和从机的收发接口反接,SPI通信是一一对应的连接。DO借DO,DI接DI,时钟和CS引脚也是如此。
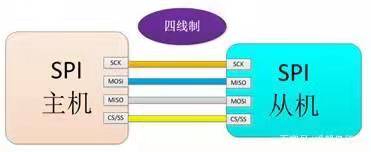
很明显可以看到是一一对应。
- 连接好后,CS引脚维持高电平,通信开始时把CS电平拉低(当然你也可以反过来,平时维持低电平通信高电平)每次发送接受数据时,时钟(CLK,SCLK等)引脚如下图变换,此时DO和DI口开始交换数据(沿时钟上升沿或下降沿,可以在cubemx里设置)
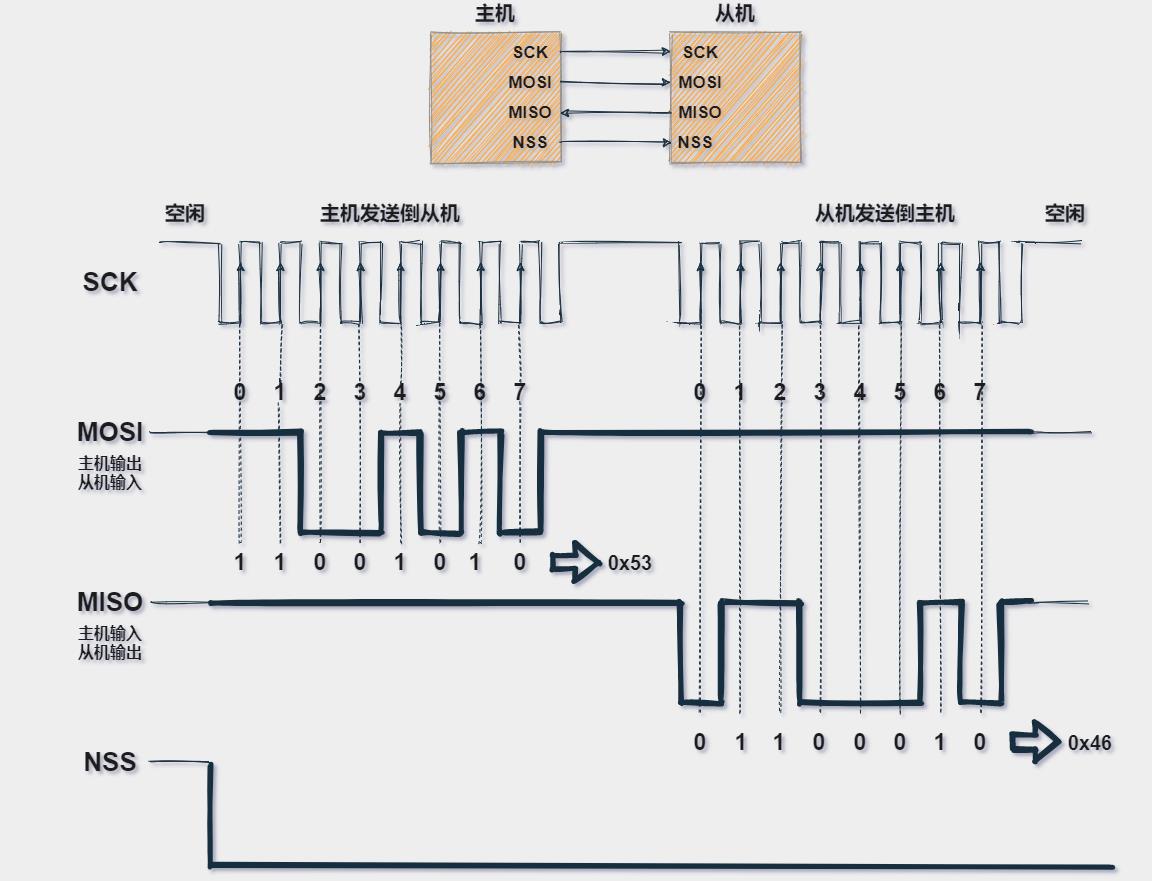
( 当然你也可以选择同步接受和发送,spi是支持的)
PS2通信协议
这个网上资料也很多了,我就大概提一下,提到编程需要知道的程度。
在连接好PS2手柄和接收器以后,接收器绿灯常亮(一般可以先试试只接电源,开启手柄,看能否配对成功),硬件没问题的情况下就可以开始编程了。
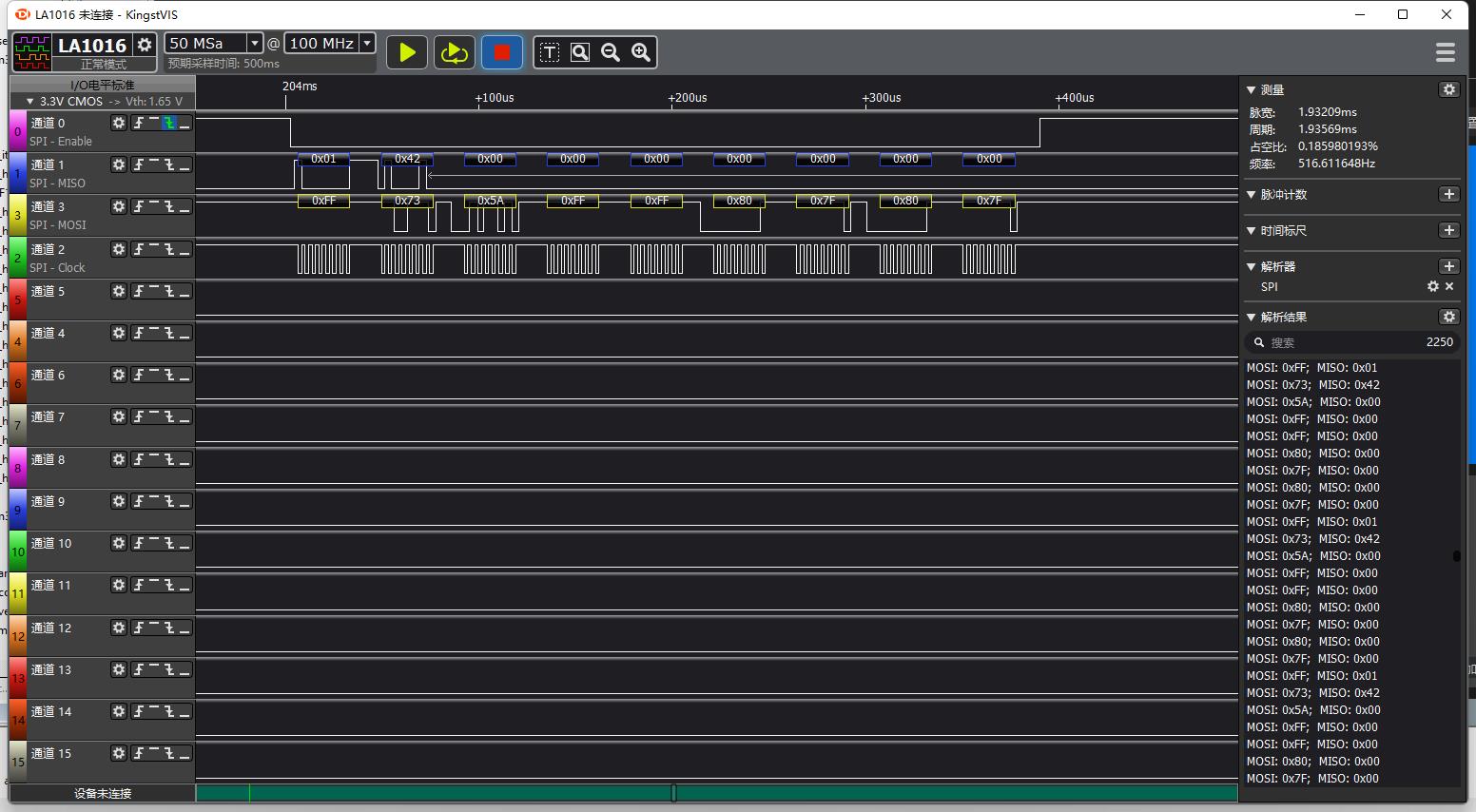
- 首先用单片机给PS2发送一个0x01,然后PS2会给你返回一个ID(说明此时是绿灯mode还是红灯mode),单片机再给他发送一个0x42(请求接受数据),PS2返回0x5a(表示可以开始传输数据),剩下的就是接受他的摇杆和按键数据了,下面这个图可以十分精确的说明。
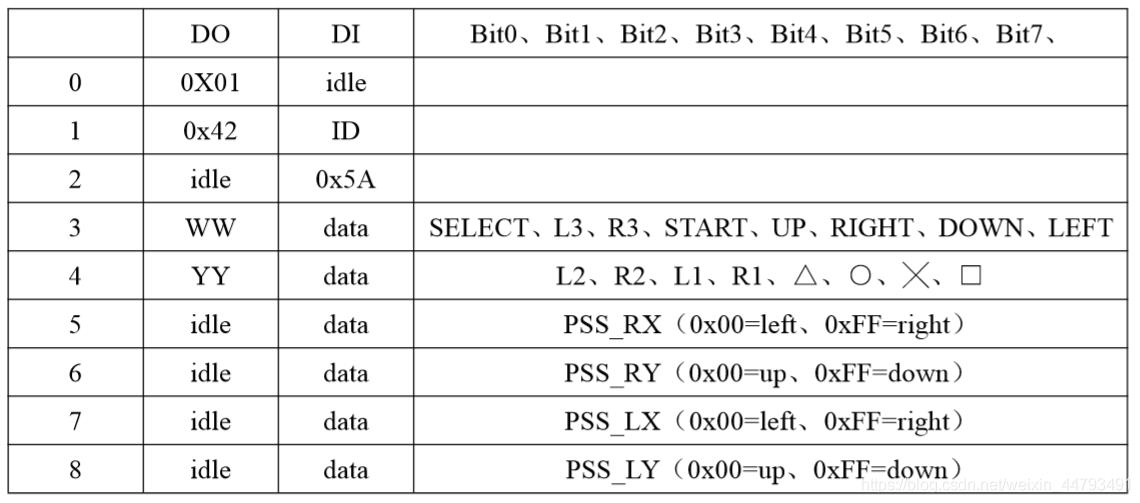
接受完数据以后就是处理数据,然后用在你想用的地方就好了。
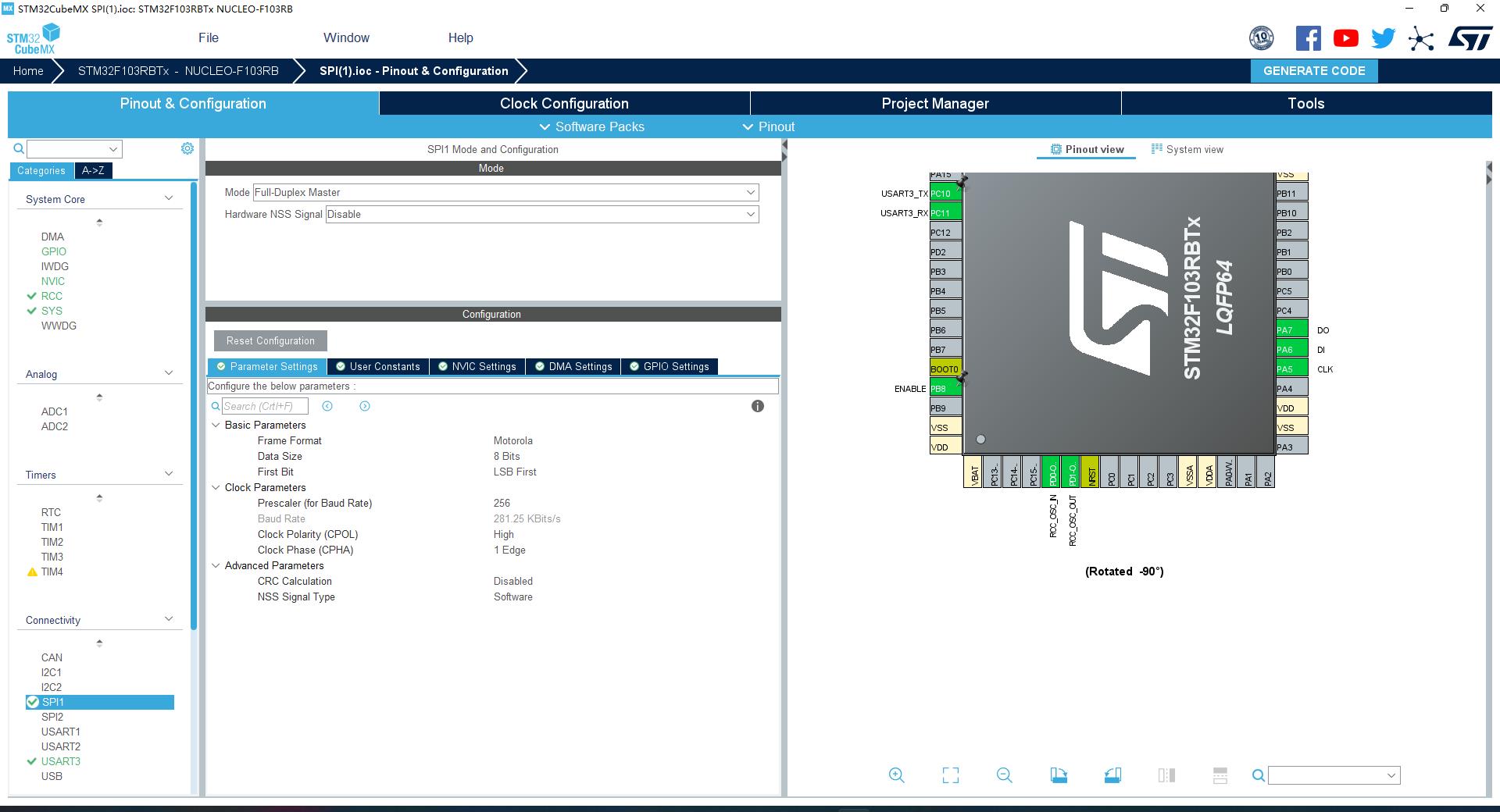
配置cubemx
我这边用的是st的nucleo-f104开发板,只要你的开发板支持SPI和串口通信就好了。
- 首先是配置时钟,没啥好说的。
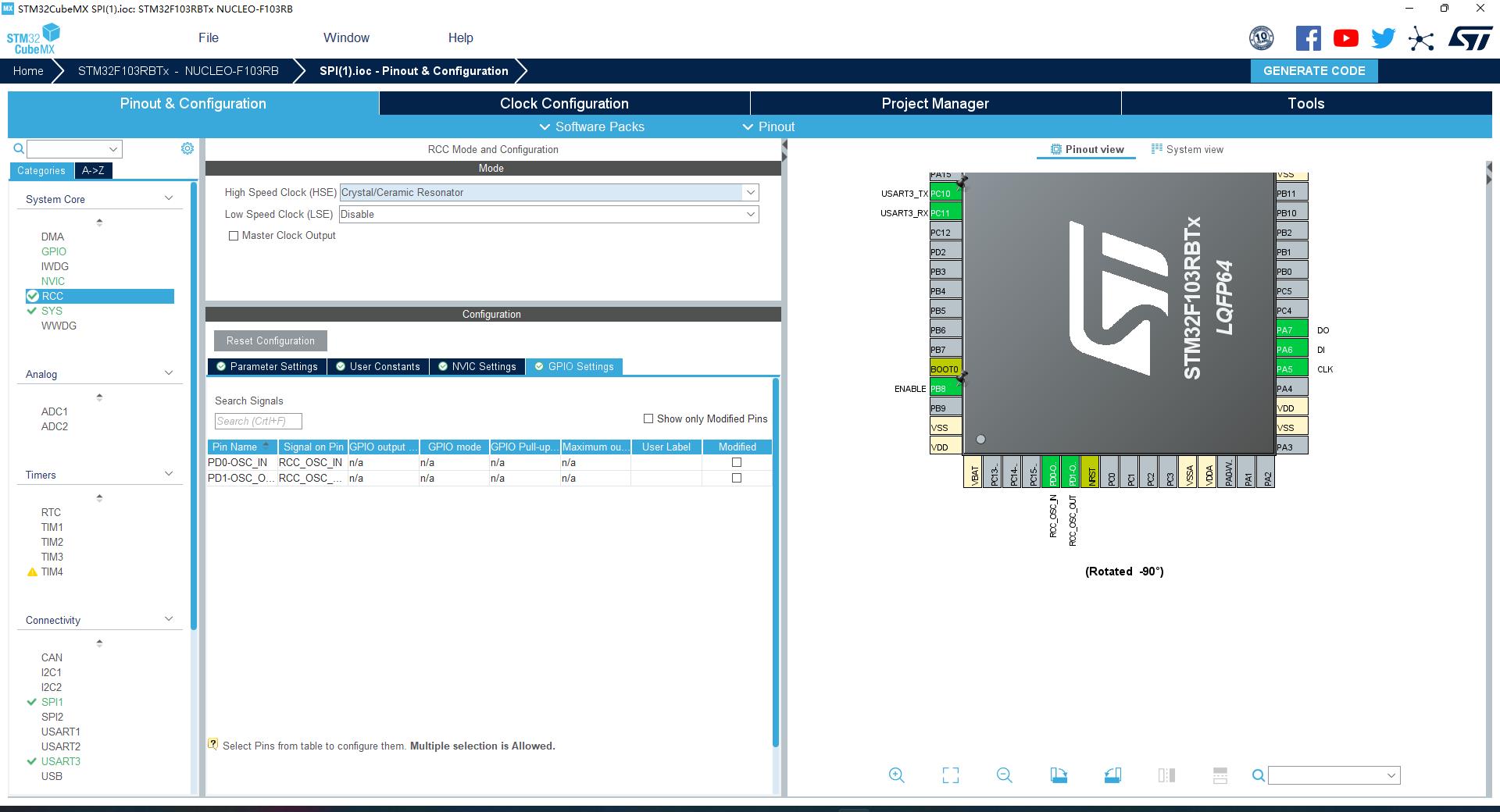
- 配置SPI,选几个你插着舒服的引脚就好了。
根据PS2硬件资料,这里的SPI不能乱配置,需要注意的地方如下
- 全双工模式,主机
- 不使能硬件nss,自己多设置一个输出引脚当CS就好
- LSB先输出
- CPOL设置为High
- CPHA设置为第一个边沿
- 64分频(非常重要,PS2支持的通信频率只有250khz,要是你单片机通信频率过高会造成PS2只返回给你0xff,就是一直给你拉高电平)
串口自己设置就好,能证明你正常接收到数据就行。
- 主程序非常简单,就是上面说的先拉低CS脚,发送一个0x01,等10us,然后发送0x42,并且接收data[1],就是手柄的ID(绿灯模式是0x41),然后再发送接收,根据接收到的数据判断哪一位按下(按下为0,否则为1)。具体时序网上都有。
uint8_t cmd[3] = 0x01,0x42,0x00; // 请求接受数据
uint8_t PS2data[9] = 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00; //存储手柄返回数据
void PS2_Get(void) //接受ps2数据
uint8_t i = 0;
HAL_GPIO_WritePin(ENABLE_GPIO_Port,ENABLE_Pin,GPIO_PIN_RESET); //拉高,开始通讯
HAL_SPI_TransmitReceive(&hspi1,&cmd[0],&PS2data[0],1,0xffff); // 发送0x01,请求接受数据
delay_us(10);
HAL_SPI_TransmitReceive(&hspi1,&cmd[1],&PS2data[1],1,0xffff); // 发送0x42,接受0x01(PS2表示开始通信)
delay_us(10);
HAL_SPI_TransmitReceive(&hspi1,&cmd[2],&PS2data[2],1,0xffff); // 发送0x00,接受ID(红绿灯模式)
delay_us(10);
for(i = 3;i <9;i++)
HAL_SPI_TransmitReceive(&hspi1,&cmd[2],&PS2data[i],1,0xffff); // 接受数据
delay_us(10);
HAL_GPIO_WritePin(ENABLE_GPIO_Port,ENABLE_Pin,GPIO_PIN_SET); //拉低,准备下次通讯
这样子就能将数据存储在单片机里了。
数据处理
我估计反正也没人看,就随便提一嘴。
按键的话,定义存储的结构是uint8_t,没有按键按下的时候返回值(二进制看)11111111,有一个按键按下时就会有对应一个1变成0,比如10111111,具体测试一下就知道了。通过位运算就可以很简单的把所有按键值提取出来,做到全按键无冲突。
摇杆我个人习惯时1-1000范围均匀变化,手柄返回的值是0-255变化,这个强制转换也就很简单可以完成了。建议一直开着红灯模式,不然摇杆不返回模拟值,调小车占空比也是这个范围嘛。
附个一个周期正常传输数据的图(逻辑分析仪)
以上是关于HAL库控制PS2手柄的主要内容,如果未能解决你的问题,请参考以下文章