目标定位基于matlab UWB卡尔曼滤波追踪无线时钟同步误差含Matlab源码 1626期
Posted 紫极神光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了目标定位基于matlab UWB卡尔曼滤波追踪无线时钟同步误差含Matlab源码 1626期相关的知识,希望对你有一定的参考价值。
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源: 【目标定位】基于matlab UWB卡尔曼滤波追踪无线时钟同步误差【含Matlab源码 1626期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、部分源代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 设置初始化信息
% N:设置卡尔曼滤波器追踪点数
% r:设置估计变量个数,这里r=2 即S、V
% s:从基站接收CCP时间戳 (输入量)
% v:时钟漂移率 (输出估计量)
% dt:主基站发送CCP的间隔 (输入量)
% wt: 系统噪声
% //没用 vt: 量测噪声,方差为3×10^(-20) 3*exp(-20)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear all;
close all;
N = 128;
r = 2;
t = 1:1:N;
T = 1;
load('matlab.mat')
load('matlab1.mat')
% 所有的观测值数据
% s = zeros(1,N); %生成1行N列的零填充的矩阵
% v = zeros(1,N);
% s0 = 0;
% v0 = 1;
% for n = 1:N
% v(n) = v0 + a(n)*n;
% s(n) = 1000+v0*n+0.5*a(n)*n*n;
% end
% wt = randn(1,N); %1行N列随机数填充的矩阵
% wt = sqrt(4)*wt./std(wt);
%这里wt什么意思?
%sqrt返回平方根
%./点除 如果a、b是矩阵,a./b就是a、b中对应的每个元素相除,得到一个新的矩阵
%返回标准差
% s = s + wt;
% v = v + wt;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 卡尔曼滤波部分,继承之前初始化变量
% A:转移矩阵 2*2维 (包含输入量dt)
% H:量测矩阵 1*2维
% Qk:系统噪声矩阵 2*2维
% Rk:量测噪声矩阵 1*1维
% P0:均方误差矩阵初始值 2*2维
% Y:状态矩阵,由k_s,k_v,k_a组成 (两个输出估计量) 2*2维
% Y0:状态矩阵的初始值 2*2维
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Y0 = [0 1]';
Y = [Y0 zeros(r,N-1)];
%A = [1 dt;0 1];
H = [1 0];
Qk = [0 0;0 5*exp(-20)];
Rk = 3*exp(-20);
P0 = [0 0;0 0];
P1 = P0;
P2 = zeros(r,r);
for k = 2:N
A = [1 tx(1,k)-tx(1,k-1);0 1];
Y(:,k) = A*Y(:,k);
P2 = A*P1*A'+Qk;
Kk = P2*H'*inv(H*P2*H'+Rk);
Y(:,k+1) = Y(:,k)+Kk*(s(:,k)-H*Y(:,k));
P1 = (eye(r,r)-Kk*H)*P2;
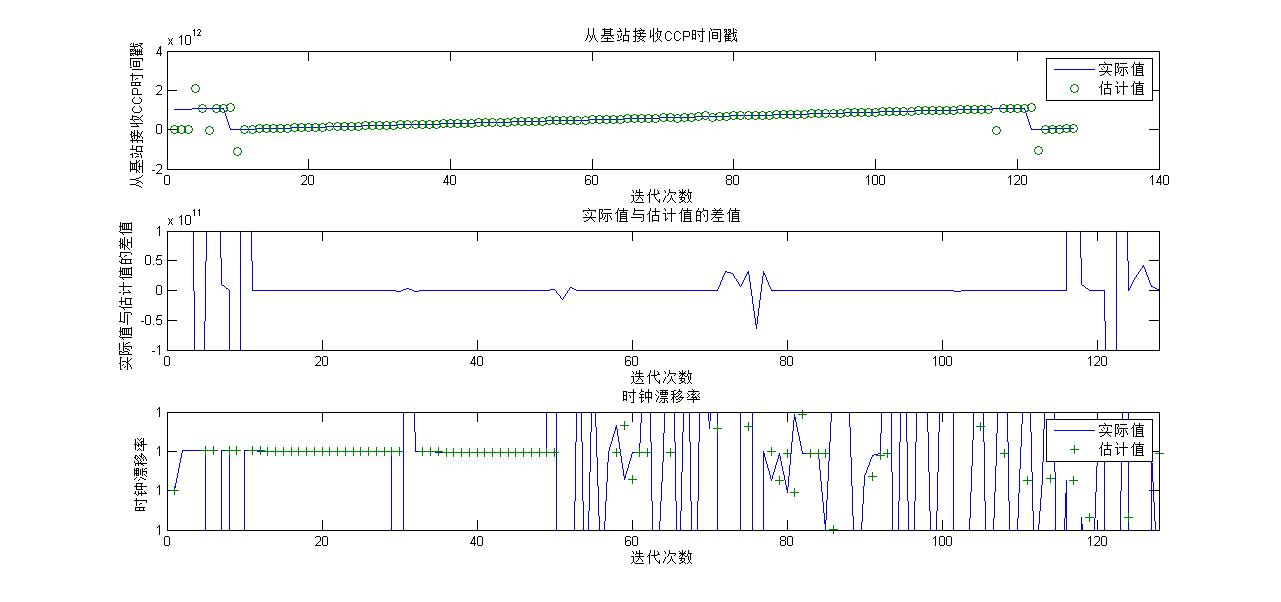
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 沈再阳.精通MATLAB信号处理[M].清华大学出版社,2015.
[2]高宝建,彭进业,王琳,潘建寿.信号与系统——使用MATLAB分析与实现[M].清华大学出版社,2020.
[3]王文光,魏少明,任欣.信号处理与系统分析的MATLAB实现[M].电子工业出版社,2018.
以上是关于目标定位基于matlab UWB卡尔曼滤波追踪无线时钟同步误差含Matlab源码 1626期的主要内容,如果未能解决你的问题,请参考以下文章
目标定位基于matlab扩展卡尔曼滤波目标定位仿真含Matlab源码 128期
目标定位基于matlab去偏卡尔曼滤波目标定位仿真含Matlab源码 140期
目标定位基于matlab循环增益卡尔曼滤波目标定位仿真含Matlab源码 145期
滤波跟踪基于matlab不变扩展卡尔曼滤波器对装有惯性导航系统和全球定位系统IMU+GPS进行滤波跟踪含Matlab源码 2232期