点云处理技术之PCL随机采样一致算法(Random sample consensus,RANSAC)
Posted 非晚非晚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云处理技术之PCL随机采样一致算法(Random sample consensus,RANSAC)相关的知识,希望对你有一定的参考价值。
1. RANSAC介绍
应用范围:曲线拟合、地面拟合、图像拼接。
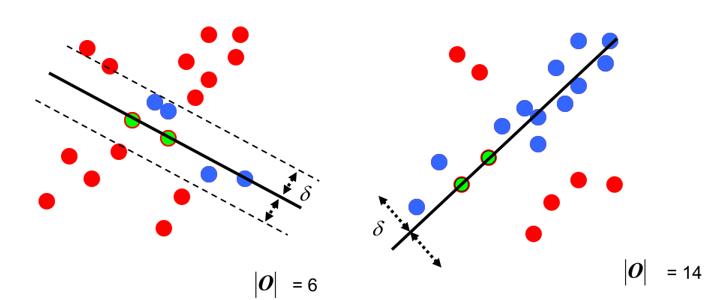
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写,这个算法于1981年由Fischler and Bolles首次提出。它是一种迭代方法,用于从一组包含局内点Inliers和局外点outliers的数据中,通过迭代的方式估计出数学模型的参数。Inliers可以解释为适合模型参数的一组点,outliers则是不适合模型的点。它是一种不确定的算法——它有一定的概率得出一个合理的结果,为了提高概率必须提高迭代次数。
RANSAC的输入为观测数据、一个参数模型和一些置信度参数,需要说明的是该参数化模型能够解释或者适用于局内点。
RANSAC的实现方式是迭代选择原始数据的随机子集。这些子集假设是局内点,假设检验步骤如下:
- 首先选取一部分点作为初始数据,也就是局内点,根据这些点拟合出一个模型,
- 根据拟合的模型对所有其他数据进行测试,如果某个点与估计模型吻合良好,也可将其视为假设的局内点。
- 如果有足够多的点被加入到了局内点,则认为该模型足够合理。
- 加入局内点之后,重新拟合模型。
- 估计
局内点与模型之间的误差来评估模型。
以上步骤只是一次迭代,根据设定的迭代次数,会重复进行以上操作。经过迭代之后有以下两种情况。
- 要么因为局内点太少,还不如上一次的模型,而被舍弃
- 要么因为比现有的模型更好而被选用。
这个算法有以下几个输入和输出:
输入:
- data —— 一组观测数据
- model —— 适应于数据的模型
- n —— 适用于模型的最少数据个数
- k —— 算法的迭代次数
- t —— 用于决定数据是否适应于模型的阀值
- d —— 判定模型是否适用于数据集的数据数目
输出:
- best_model —— 跟数据最匹配的模型参数(如果没有找到好的模型,返回null)
- best_consensus_set —— 估计出模型的数据点
- best_error —— 跟数据相关的估计出的模型错误
2. RANSAC与最小二乘法
-
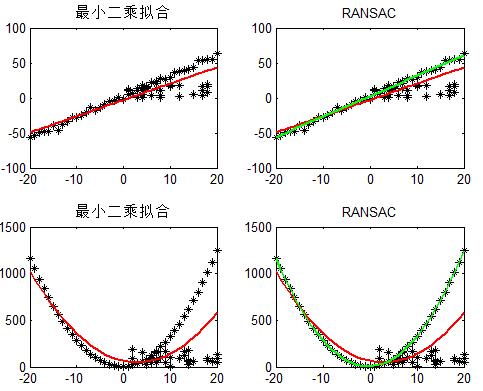
普通最小二乘是保守派:在现有数据下,如何实现最优。是从一个整体误差最小的角度去考虑,尽量谁也不得罪。
-
RANSAC是改革派:首先假设数据具有某种特性(目的),为了达到目的,适当割舍一些现有的数据。
给出最小二乘拟合(红线)、RANSAC(绿线)对于一阶直线、二阶曲线的拟合对比:
3. RANSAC思路流程
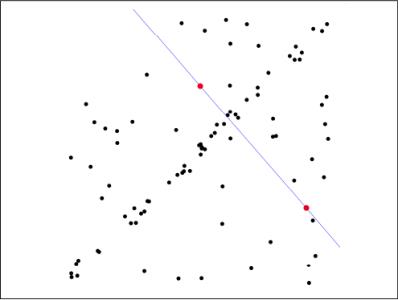
- 第一步:假定模型(如直线方程),并随机抽取Nums个(以2个为例)样本点,对模型进行拟合:
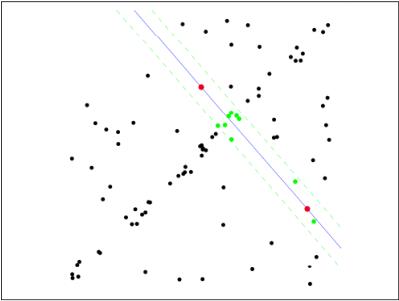
- 第二步:由于不是严格线性,数据点都有一定波动,假设容差范围为:sigma,找出距离拟合曲线容差范围内的点,并统计点的个数:
- 第三步:重新随机选取Nums个点,重复第一步~第二步的操作,直到结束迭代:
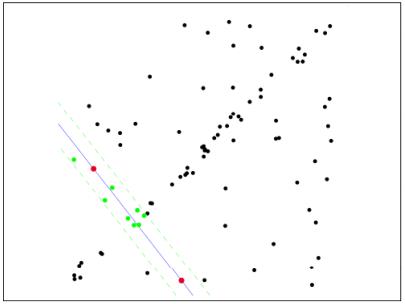
- 第四步:每一次拟合后,容差范围内都有对应的数据点数,找出数据点个数最多的情况,就是最终的拟合结果:
需要说明给定几点:
- 每一次随机样本数
Nums的选取:如二次曲线最少需要3个点确定,一般来说,Nums少一些易得出较优结果;- 抽样迭代次数
Iter的选取:即重复多少次抽取,就认为是符合要求从而停止运算?太多计算量大,太少性能可能不够理想;- 容差
Sigma的选取:sigma取大取小,对最终结果影响较大;
RANSAC的作用有点类似:将数据一切两段,一部分是自己人,一部分是敌人,自己人留下商量事,敌人赶出去。RANSAC开的是家庭会议,不像最小二乘总是开全体会议。
4. 代码举例
下面设置 两种类型,一种拟合球面(参数-sf),一种是拟合平面(参数-f)。
#include <iostream>
#include <pcl/console/parse.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/sample_consensus/sac_model_sphere.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
boost::shared_ptr<pcl::visualization::PCLVisualizer>
simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
//viewer->addCoordinateSystem (1.0, "global");
viewer->initCameraParameters();
return (viewer);
int main(int argc, char **argv)
// 初始化点云对象
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); //存储源点云
pcl::PointCloud<pcl::PointXYZ>::Ptr final(new pcl::PointCloud<pcl::PointXYZ>); //存储提取的局内点
// 填充点云数据
cloud->width = 500; //填充点云数目
cloud->height = 1; //无序点云
cloud->is_dense = false;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
//if: 局内点1/5,其余在圆球内
//f:平面,sf则为球面,所以else在此作用不大。
if (pcl::console::find_argument(argc, argv, "-s") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0)
//根据命令行参数用x^2+y^2+Z^2=1设置一部分点云数据,此时点云组成1/4个球体作为内点
cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0);
cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0);
if (i % 5 == 0)
cloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0); //局外点:1/5
else if (i % 2 == 0)
cloud->points[i].z = sqrt(1 - (cloud->points[i].x * cloud->points[i].x) - (cloud->points[i].y * cloud->points[i].y));
else
cloud->points[i].z = -sqrt(1 - (cloud->points[i].x * cloud->points[i].x) - (cloud->points[i].y * cloud->points[i].y));
//else:x+y+z = 1,一般局外点--作用不大,只是为了不报错,因为原始点云也不是下面的方式产生的
else
//用x+y+z=1设置一部分点云数据,此时地拿云组成的菱形平面作为内点
cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0);
cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0);
if (i % 2 == 0)
cloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0); //对应的局外点
else
cloud->points[i].z = -1 * (cloud->points[i].x + cloud->points[i].y);
std::vector<int> inliers; //存储局内点集合的点的索引的向量
pcl::SampleConsensusModelSphere<pcl::PointXYZ>::Ptr
model_s(new pcl::SampleConsensusModelSphere<pcl::PointXYZ>(cloud)); //针对球模型的对象
pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptr
model_p(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud)); //针对平面模型的对象
//f:平面,sf则为球面
if (pcl::console::find_argument(argc, argv, "-f") >= 0)
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_p);
ransac.setDistanceThreshold(.01); //与平面距离小于0.01 的点称为局内点考虑
ransac.computeModel(); //执行随机参数估计
ransac.getInliers(inliers); //存储估计所得的局内点
else if (pcl::console::find_argument(argc, argv, "-sf") >= 0)
//根据命令行参数 来随机估算对应的圆球模型,存储估计的内点
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_s);
ransac.setDistanceThreshold(.01);
ransac.computeModel();
ransac.getInliers(inliers);
// 复制估算模型的所有的局内点到final中
pcl::copyPointCloud<pcl::PointXYZ>(*cloud, inliers, *final);
// 创建可视化对象并加入原始点云或者所有的局内点
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer;
if (pcl::console::find_argument(argc, argv, "-f") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0)
viewer = simpleVis(final);
else
viewer = simpleVis(cloud);
while (!viewer->wasStopped())
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
return 0;
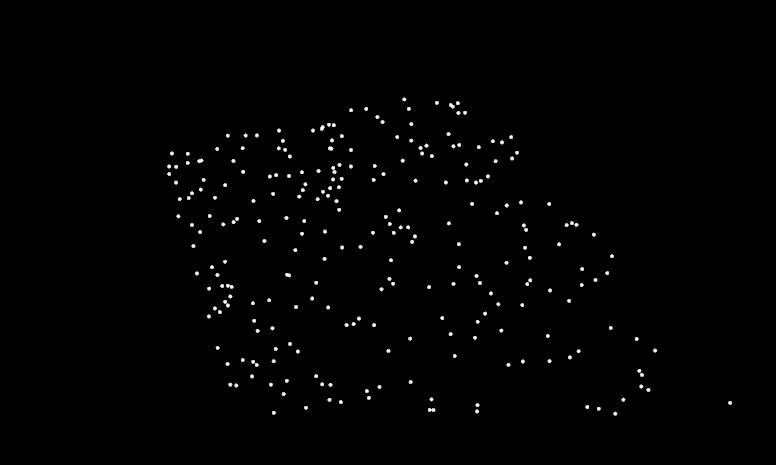
拟合平面的命令为:./random_sample_consensus -f,具体效果如下:
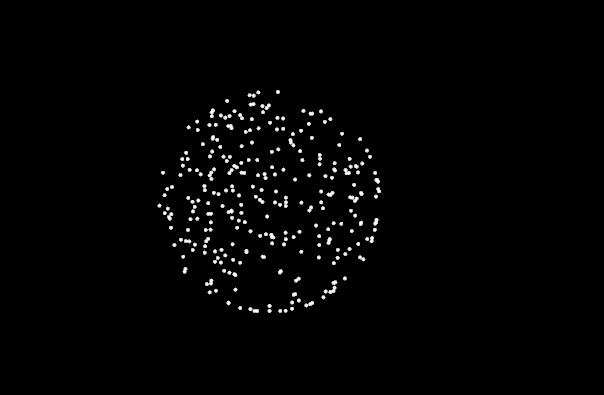
拟合球面的命令为:./random_sample_consensus -sf,具体效果如下:
参考:
https://pcl.readthedocs.io/projects/tutorials/en/latest/random_sample_consensus.html#random-sample-consensus
以上是关于点云处理技术之PCL随机采样一致算法(Random sample consensus,RANSAC)的主要内容,如果未能解决你的问题,请参考以下文章