opencv项目week3
Posted 南方382
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv项目week3相关的知识,希望对你有一定的参考价值。
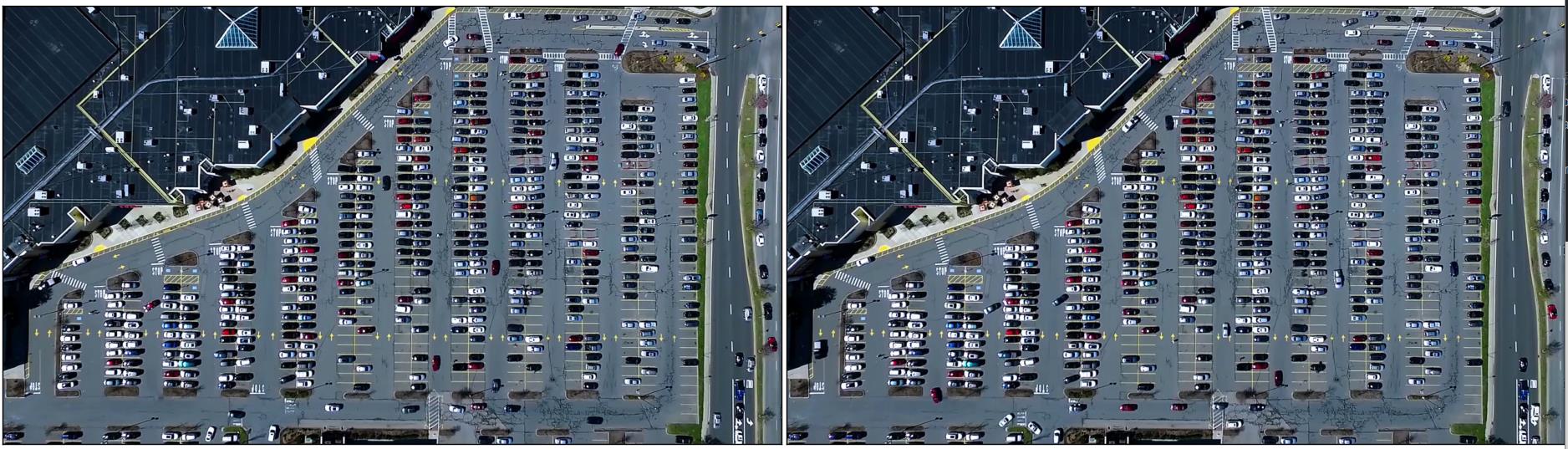
停车场车位识别
图像预处理
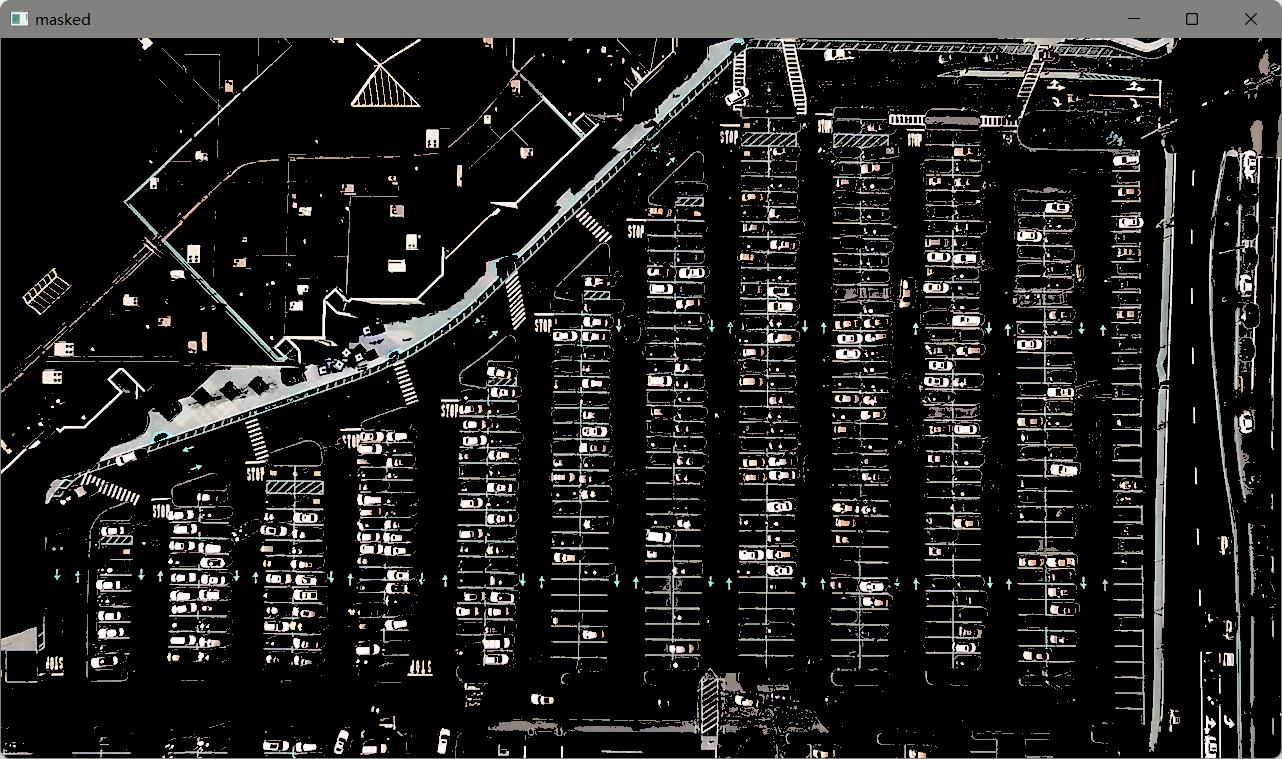
首先需要对图片进行过滤操作
white_yellow_images = list(map(park.select_rgb_white_yellow, test_images))
def select_rgb_white_yellow(self,image):
#过滤掉背景
lower = np.uint8([120, 120, 120])
upper = np.uint8([255, 255, 255])
# lower_red和高于upper_red的部分分别变成0,lower_red~upper_red之间的值变成255,相当于过滤背景
white_mask = cv2.inRange(image, lower, upper)
self.cv_show('white_mask',white_mask)
masked = cv2.bitwise_and(image, image, mask = white_mask)
self.cv_show('masked',masked)
return masked

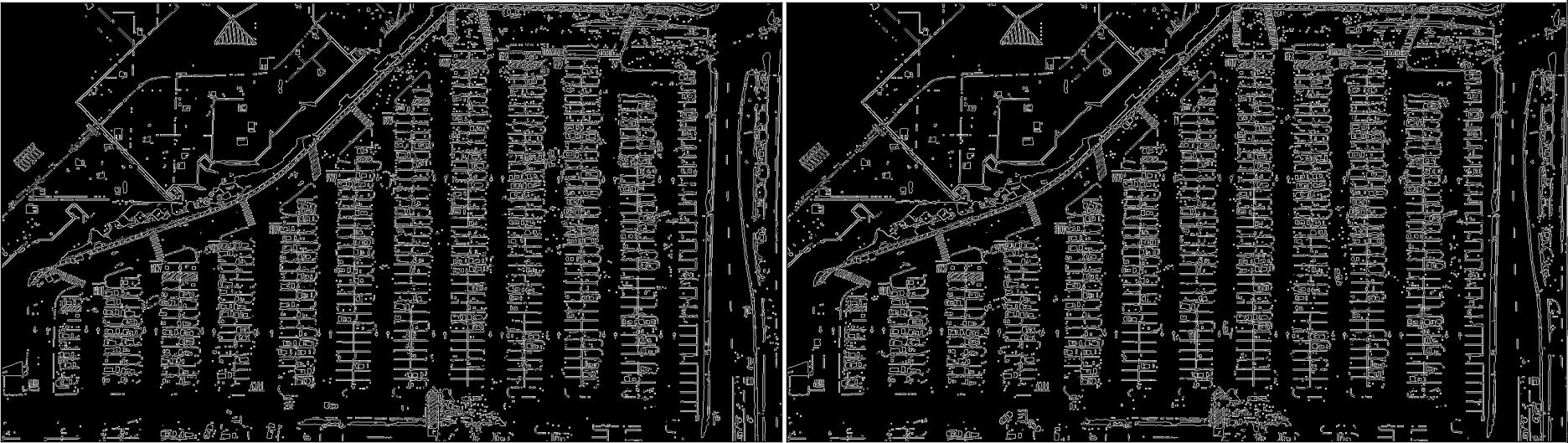
然后转换成灰度图
gray_images = list(map(park.convert_gray_scale, white_yellow_images))
park.show_images(gray_images)
def convert_gray_scale(self,image):
return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)

再进行边缘检测
edge_images = list(map(lambda image: park.detect_edges(image), gray_images))
park.show_images(edge_images)
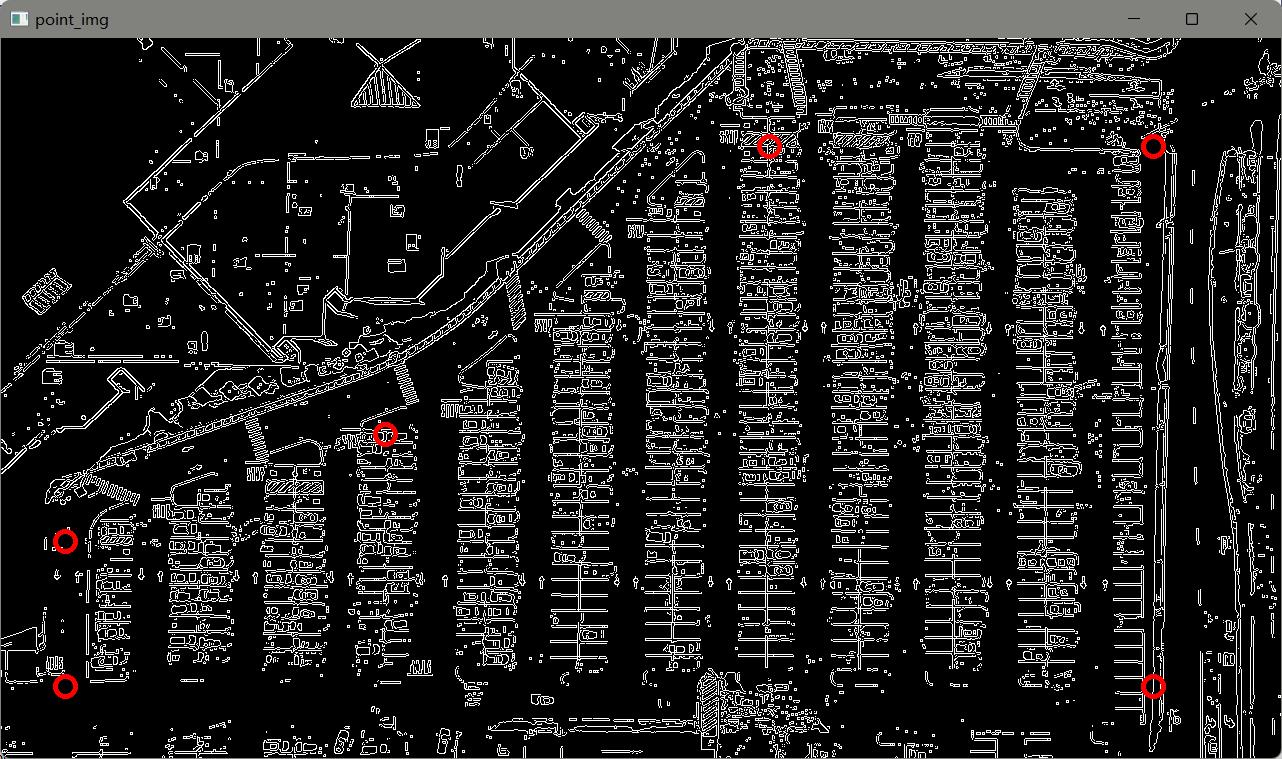
人工指出并画出边缘
roi_images = list(map(park.select_region, edge_images))
park.show_images(roi_images)
def select_region(self,image):
"""
手动选择区域
"""
# first, define the polygon by vertices
rows, cols = image.shape[:2]
pt_1 = [cols*0.05, rows*0.90]
pt_2 = [cols*0.05, rows*0.70]
pt_3 = [cols*0.30, rows*0.55]
pt_4 = [cols*0.6, rows*0.15]
pt_5 = [cols*0.90, rows*0.15]
pt_6 = [cols*0.90, rows*0.90]
vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]], dtype=np.int32)
point_img = image.copy()
point_img = cv2.cvtColor(point_img, cv2.COLOR_GRAY2RGB)
for point in vertices[0]:
cv2.circle(point_img, (point[0],point[1]), 10, (0,0,255), 4)
self.cv_show('point_img',point_img)
return self.filter_region(image, vertices)
hough变换-直线检测,检测停车位的两条水平线一条垂直线
list_of_lines = list(map(park.hough_lines, roi_images))
def draw_lines(self,image, lines, color=[255, 0, 0], thickness=2, make_copy=True):
# 过滤霍夫变换检测到直线
if make_copy:
image = np.copy(image)
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
cv2.line(image, (x1, y1), (x2, y2), color, thickness)
print(" No lines detected: ", len(cleaned))
return image
画出所有的线
line_images = []
for image, lines in zip(test_images, list_of_lines):
line_images.append(park.draw_lines(image, lines))
park.show_images(line_images)
def draw_lines(self,image, lines, color=[255, 0, 0], thickness=2, make_copy=True):
# 过滤霍夫变换检测到直线
if make_copy:
image = np.copy(image)
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
cv2.line(image, (x1, y1), (x2, y2), color, thickness)
print(" No lines detected: ", len(cleaned))
return image
获得区域和坐标
# 区域
rect_images = []
# 坐标
rect_coords = []
for image, lines in zip(test_images, list_of_lines):
new_image, rects = park.identify_blocks(image, lines)
rect_images.append(new_image)
rect_coords.append(rects)
park.show_images(rect_images)
def identify_blocks(self,image, lines, make_copy=True):
if make_copy:
new_image = np.copy(image)
#Step 1: 过滤部分直线
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
#Step 2: 对直线按照x1进行排序
import operator
list1 = sorted(cleaned, key=operator.itemgetter(0, 1))
#Step 3: 找到多个列,相当于每列是一排车
clusters =
dIndex = 0
clus_dist = 10
for i in range(len(list1) - 1):
distance = abs(list1[i+1][0] - list1[i][0])
if distance <= clus_dist:
if not dIndex in clusters.keys(): clusters[dIndex] = []
clusters[dIndex].append(list1[i])
clusters[dIndex].append(list1[i + 1])
else:
dIndex += 1
#Step 4: 得到坐标
rects =
i = 0
for key in clusters:
all_list = clusters[key]
cleaned = list(set(all_list))
if len(cleaned) > 5:
cleaned = sorted(cleaned, key=lambda tup: tup[1])
avg_y1 = cleaned[0][1]
avg_y2 = cleaned[-1][1]
avg_x1 = 0
avg_x2 = 0
for tup in cleaned:
avg_x1 += tup[0]
avg_x2 += tup[2]
avg_x1 = avg_x1/len(cleaned)
avg_x2 = avg_x2/len(cleaned)
rects[i] = (avg_x1, avg_y1, avg_x2, avg_y2)
i += 1
print("Num Parking Lanes: ", len(rects))
#Step 5: 把列矩形画出来
buff = 7
for key in rects:
tup_topLeft = (int(rects[key][0] - buff), int(rects[key][1]))
tup_botRight = (int(rects[key][2] + buff), int(rects[key][3]))
cv2.rectangle(new_image, tup_topLeft,tup_botRight,(0,255,0),3)
return new_image, rects
选择区域并画出停车位
# 选择区域
for image, rects in zip(test_images, rect_coords):
new_image, spot_dict = park.draw_parking(image, rects)
delineated.append(new_image)
spot_pos.append(spot_dict)
park.show_images(delineated)
final_spot_dict = spot_pos[1]
print(len(final_spot_dict))
def draw_parking(self,image, rects, make_copy = True, color=[255, 0, 0], thickness=2, save = True):
if make_copy:
new_image = np.copy(image)
gap = 15.5
spot_dict = # 字典:一个车位对应一个位置
tot_spots = 0
#微调
adj_y1 = 0: 20, 1:-10, 2:0, 3:-11, 4:28, 5:5, 6:-15, 7:-15, 8:-10, 9:-30, 10:9, 11:-32
adj_y2 = 0: 30, 1: 50, 2:15, 3:10, 4:-15, 5:15, 6:15, 7:-20, 8:15, 9:15, 10:0, 11:30
adj_x1 = 0: -8, 1:-15, 2:-15, 3:-15, 4:-15, 5:-15, 6:-15, 7:-15, 8:-10, 9:-10, 10:-10, 11:0
adj_x2 = 0: 0, 1: 15, 2:15, 3:15, 4:15, 5:15, 6:15, 7:15, 8:10, 9:10, 10:10, 11:0
for key in rects:
tup = rects[key]
x1 = int(tup[0]+ adj_x1[key])
x2 = int(tup[2]+ adj_x2[key])
y1 = int(tup[1] + adj_y1[key])
y2 = int(tup[3] + adj_y2[key])
cv2.rectangle(new_image, (x1, y1),(x2,y2),(0,255,0),2)
num_splits = int(abs(y2-y1)//gap)
for i in range(0, num_splits+1):
y = int(y1 + i*gap)
cv2.line(new_image, (x1, y), (x2, y), color, thickness)
if key > 0 and key < len(rects) -1 :
#竖直线
x = int((x1 + x2)/2)
cv2.line(new_image, (x, y1), (x, y2), color, thickness)
# 计算数量
if key == 0 or key == (len(rects) -1):
tot_spots += num_splits +1
else:
tot_spots += 2*(num_splits +1)
# 字典对应好
if key == 0 or key == (len(rects) -1):
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
spot_dict[(x1, y, x2, y+gap)] = cur_len +1
else:
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
x = int((x1 + x2)/2)
spot_dict[(x1, y, x, y+gap)] = cur_len +1
spot_dict[(x, y, x2, y+gap)] = cur_len +2
print("total parking spaces: ", tot_spots, cur_len)
if save:
filename = 'with_parking.jpg'
cv2.imwrite(filename, new_image)
return new_image, spot_dict
最后保存到文件里面
with open('spot_dict.pickle', 'wb') as handle:
pickle.dump(final_spot_dict, handle, protocol=pickle.HIGHEST_PROTOCOL)
park.save_images_for_cnn(test_images[0],final_spot_dict)
return final_spot_dict
导入模型
model = keras_model(weights_path)
def keras_model(weights_path):
model = load_model(weights_path)
return model
预测图片
img_test(test_images,final_spot_dict,model,class_dictionary)
def img_test(test_images,final_spot_dict,model,class_dictionary):
for i in range (len(test_images)):
predicted_images = park.predict_on_image(test_images[i],final_spot_dict,model,class_dictionary)
make_prediction
def make_prediction(self,image,model,class_dictionary):
#预处理
img = image/255.
#转换成4D tensor
image = np.expand_dims(img, axis=0)
# 用训练好的模型进行训练
class_predicted = model.predict(image)
inID = np.argmax(class_predicted[0])
label = class_dictionary[inID]
return label
def predict_on_以上是关于opencv项目week3的主要内容,如果未能解决你的问题,请参考以下文章