PCL:八叉树(Octree)实现点云体素内近邻搜索
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL:八叉树(Octree)实现点云体素内近邻搜索相关的知识,希望对你有一定的参考价值。
1 八叉树 Octree
八叉树(Octree)结构是由 Hunter 博士于1978年首次提出的一种数据模型。八叉树结构通过对三维空间的几何实体进行体元剖分,每个体元具有相同的时间和空间复杂度,通过循环递归的划分方法对三维空间的几何对象进行剖分,从而构成一个具有根节点的方向图。在八叉树结构中如果被划分的体元具有相同的属性,则该体元构成一个叶节点;否则继续对该体元剖分成8个子立方体,依次递剖分,如下示意图所示。
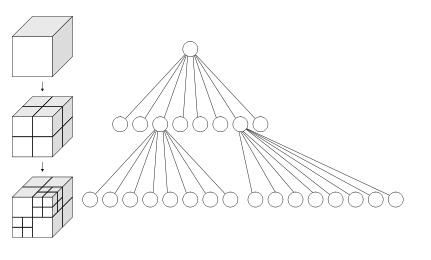
八叉树是一种用于描述三维空间的树状数据结构。八叉树的每个节点表示一个正方体的体积元素,每个节点有八个叶子节点,这八个叶子节点所表示的体积元素加在一起就等于父节点的体积。一般中心点作为节点的分中心。八叉树若不为空树的话,树中的任意节点的子节点恰好只会有八个或零个,子节点不会有0和8以外的数目。
八叉树的分辨率是指最低一级的叶子节点的尺寸。如果分辨率设置为0.01m,那么每个叶子节点就是一个1cm的小方块。
简单来说,八叉树的存储结构可用于对应元素的查找,依次对立方体进行划分,寻找查找元素对应的小立方体再次进行划分查找。
生成的八叉树的节点可分为三类:
- 灰节点: 它对应的立方体部分的为查找元素所占据;
- 白节点: 它对应的立方体没有查找元素的内容;
- 黑节点: 它对应的立方体全部为查找元素所占据。
参考链接:PCL中八叉树理论
2 体素内近邻搜索
体素内近邻搜索(Neighbors within Voxel Search),是指在某一点所在的体素中搜索该点的近邻点。搜索点和搜索结果间的最大距离取决于八叉树的分辨率。
3 代码实现
#define BOOST_TYPEOF_EMULATION
#include <pcl/io/pcd_io.h>
#include <pcl/octree/octree.h>
using namespace std;
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
int main()
//-------------------------- 加载点云 --------------------------
cout << "->正在加载点云..." << endl;
PointCloudT::Ptr cloud(new PointCloudT);
if (pcl::io::loadPCDFile("1.pcd", *cloud) < 0)
PCL_ERROR("\\a->点云文件不存在!\\n");
system("pause");
return -1;
cout << "->加载点云点数:" << cloud->points.size() << endl;
//========================== 加载点云 ==========================
//------------------------- 构建Octree -------------------------
float resolution = 0.2; //Octree分辨率,即最低级叶子节点的大小
pcl::octree::OctreePointCloudSearch<PointT> octree(resolution); //初始化八叉树
octree.setInputCloud(cloud); //设置输入点云
octree.addPointsFromInputCloud(); //构建八叉树
//========================= 构建Octree =========================
//------------------------ 体素内近邻搜索 -----------------------
//设置搜索点
pcl::PointXYZ searchPoint;
searchPoint = cloud->points[100];
// 体素内近邻搜索
PointCloudT cloud_voxel_neighbor; //存放体素内近邻点点云
vector<int> pointIdxVec; //存放体素近邻搜索的结果向量
if (octree.voxelSearch(searchPoint, pointIdxVec))
cout << "->搜索点坐标:" << searchPoint << endl;
cout << "->体素近邻点个数:" << pointIdxVec.size() << endl;
cout << "->体素近邻点坐标:" << endl;
for (size_t i = 0; i < pointIdxVec.size(); ++i)
//cout << cloud->points[pointIdxVec[i]] << endl;
cloud_voxel_neighbor.push_back(cloud->points[pointIdxVec[i]]);
//提取体素内近邻点
pcl::io::savePCDFileBinary("cloud_voxel_neighbor.pcd", cloud_voxel_neighbor);
cout << "->体素内近邻点详情:\\n" << cloud_voxel_neighbor << endl;
//======================== 体素内近邻搜索 =======================
return 0;
输出结果:
->正在加载点云...
->加载点云点数:41049
->搜索点坐标:(-0.015396,-0.29139,-1.901)
->体素近邻点个数:642
->体素近邻点坐标:
->体素内近邻点详情:
points[]: 642
width: 642
height: 1
is_dense: 1
sensor origin (xyz): [0, 0, 0] / orientation (xyzw): [0, 0, 0, 1]
4 结果展示
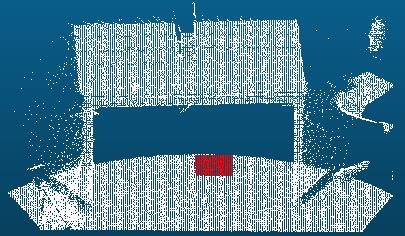
白色点为原始点云
红色点为当 八 叉 树 分 辨 率 = 0.2 m 八叉树分辨率 = 0.2m 八叉树分辨率=0.2m 时,点云中一点(本次实验选择的第100个点)对应的近邻点。
5 注意
- 根据需求设置Octree分辨力
- 当搜索点 s e a r c h P o i n t searchPoint searchPoint 为原始点云中一点时,其体素内近邻点包含搜索点本身;否则,不包含。
相关链接:
以上是关于PCL:八叉树(Octree)实现点云体素内近邻搜索的主要内容,如果未能解决你的问题,请参考以下文章