转载深度学习-卷积神经网络(CNN)
Posted AXYZdong
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了转载深度学习-卷积神经网络(CNN)相关的知识,希望对你有一定的参考价值。
- CNN基本原理
- 经典CNN
卷积神经网络基本原理
卷积神经网络的基本结构大致包括:卷积层、激活函数、池化层、全连接层、输出层等。
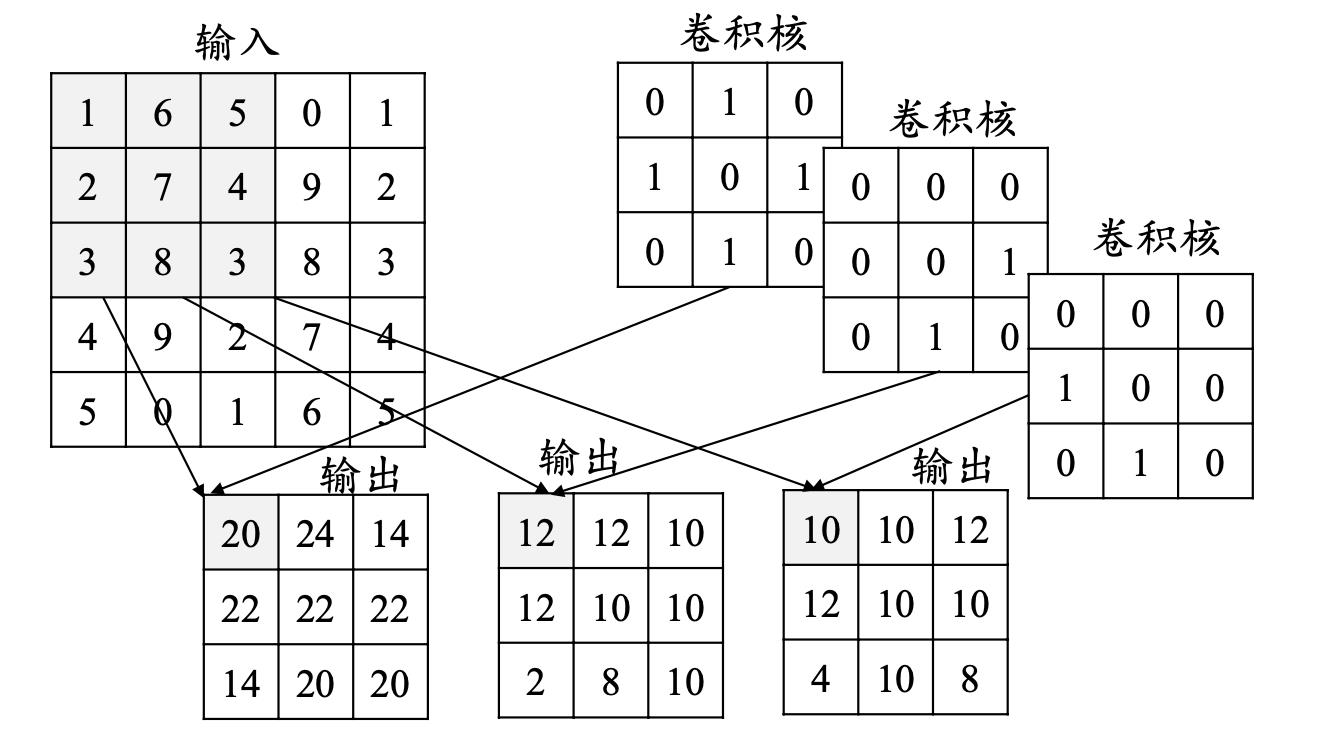
卷积层
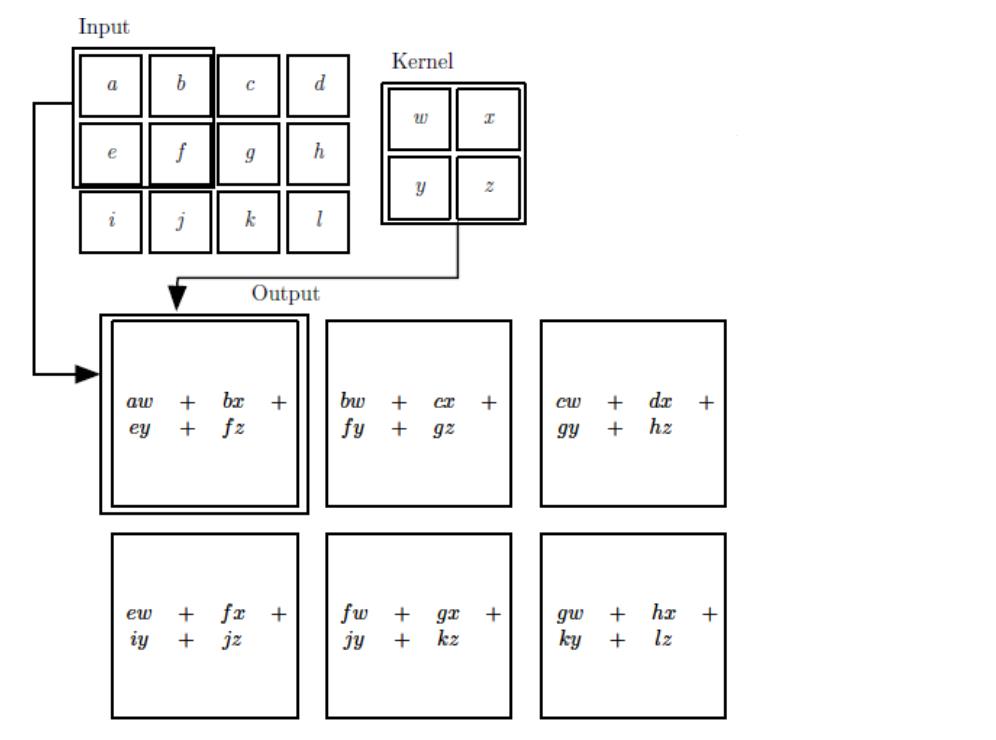
二维卷积运算:给定二维的图像I作为输入,二维卷积核K,卷积运算可表示为
S
(
i
,
j
)
=
(
I
∗
K
)
(
i
,
j
)
=
∑
m
∑
n
I
(
i
−
m
,
j
−
n
)
K
(
m
,
n
)
S(i,j)=(I∗K)(i,j)=∑m∑nI(i−m,j−n)K(m,n)
S(i,j)=(I∗K)(i,j)=∑m∑nI(i−m,j−n)K(m,n),卷积核需要进行上下翻转和左右反转
S ( i , j ) = ∑ ( [ I ( i − 2 , j − 2 ) I ( i − 2 , j − 1 ) I ( i − 2 , j ) I ( i − 1 , j − 2 ) I ( i − 1 , j − 1 ) I ( i − 1 , j ) I ( i , j − 2 ) I ( i , j − 1 ) I ( i , j ) ] [ K ( 2 , 2 ) K ( 2 , 1 ) K ( 2 , 0 ) K ( 1 , 2 ) K ( 1 , 1 ) K ( 1 , 0 ) K ( 0 , 2 ) K ( 0 , 1 ) K ( 0 , 0 ) ] ) S(i,j) =\\sum \\beginpmatrix \\beginbmatrix I(i-2,j-2)& I(i-2,j-1) & I(i-2,j)\\\\[2ex] I(i-1,j-2)& I(i-1,j-1) & I(i-1,j)\\\\[2ex] I(i,j-2) & I(i,j-1)& I(i,j) \\\\ \\endbmatrix \\beginbmatrix K(2,2)& K(2,1) & K(2,0)\\\\[2ex] K(1,2)& K(1,1)& K(1,0)\\\\[2ex] K(0,2)& K(0,1)& K(0,0) \\\\ \\endbmatrix \\\\[2ex] \\endpmatrix S(i,j)=∑⎝⎜⎜⎜⎛⎣⎢⎢⎢⎡I(i−2,j−2)I(i−1,j−2)I(i,j−2)I(i−2,j−1)I(i−1,j−1)I(i,j−1)I(i−2,j)I(i−1,j)I(i,j)⎦⎥⎥⎥⎤⎣⎢⎢⎢⎡K(2,2)K(1,2)K(0,2)K(2,1)K(1,1)K(0,1)K(2,0)K(1,0)K(0,0)⎦⎥⎥⎥⎤⎠⎟⎟⎟⎞
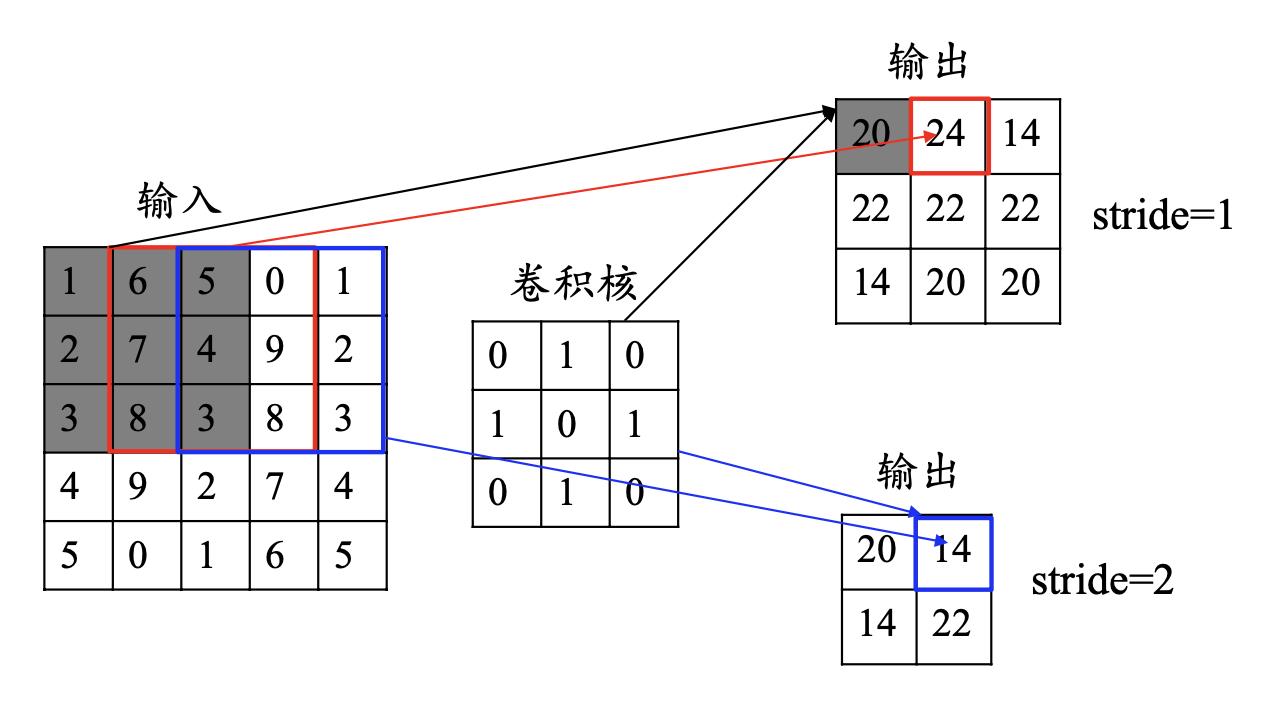
卷积实际上就是互相关
卷积的步长(stride):卷积核移动的步长
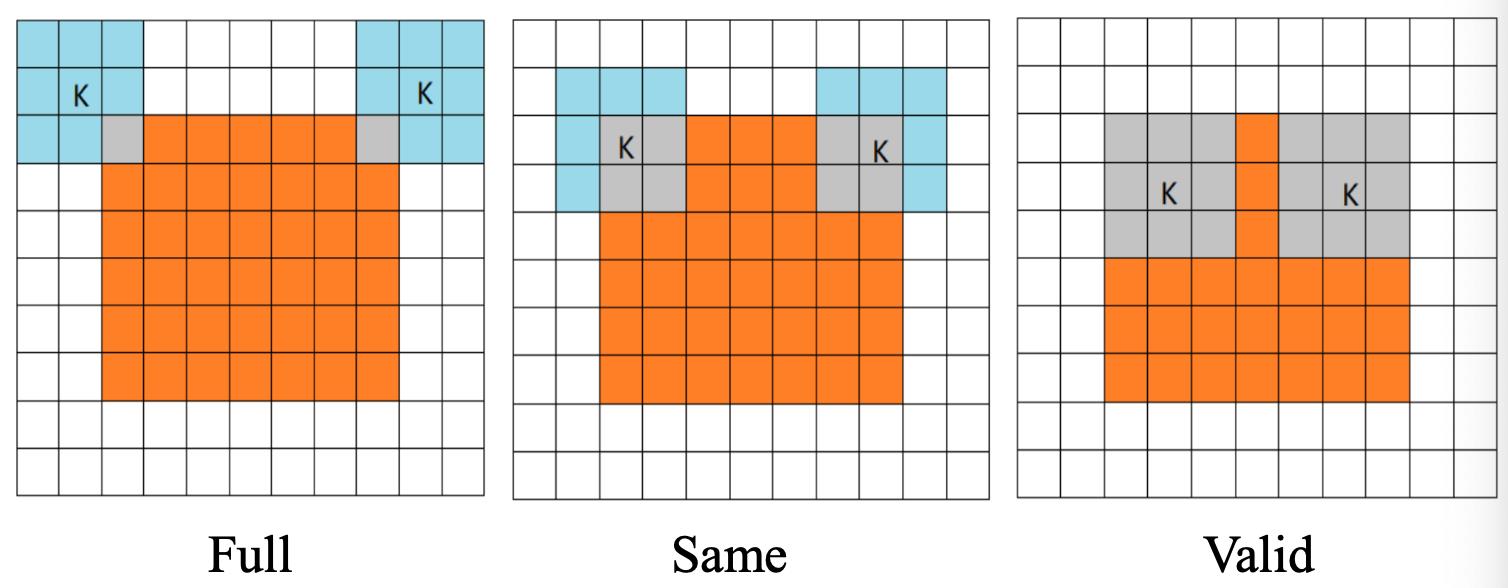
卷积的模式:Full**,** Same和Valid
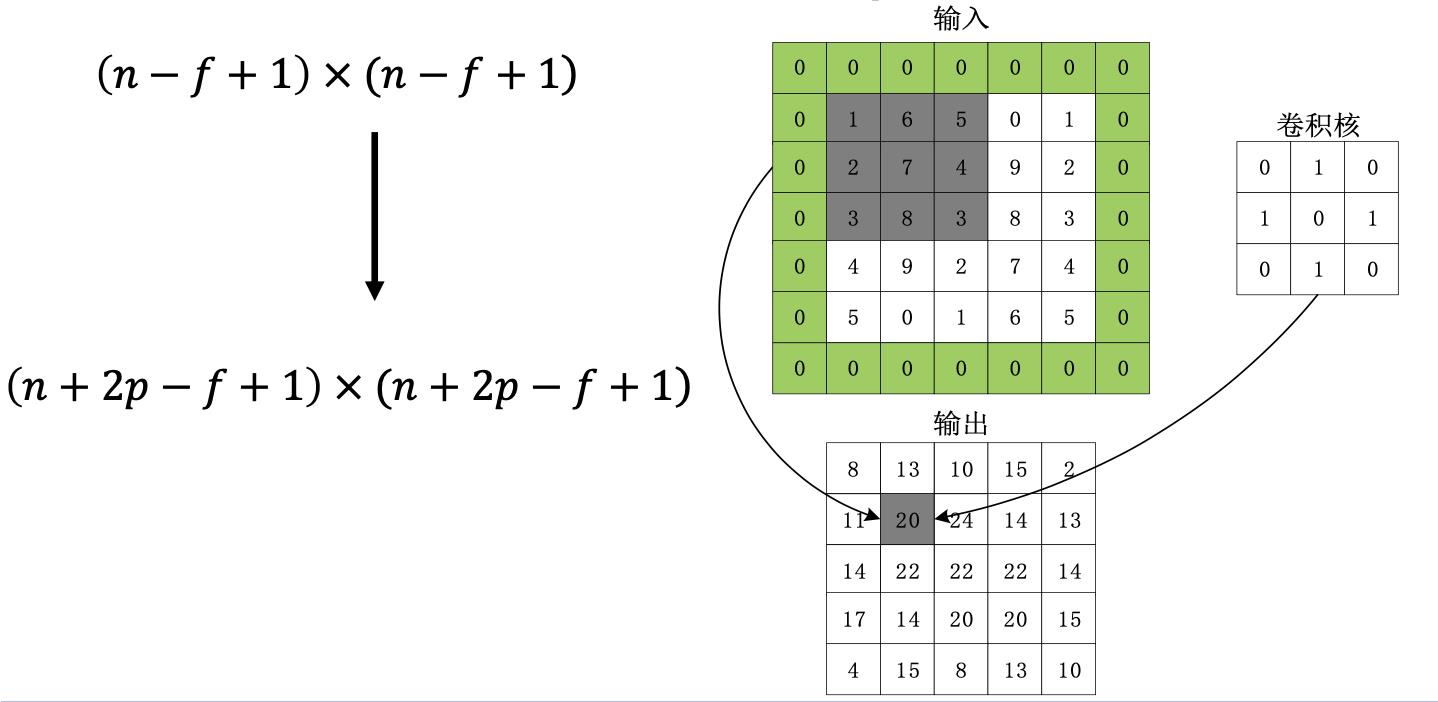
数据填充:如果我们有一个 𝑛×𝑛 的图像,使用𝑓×𝑓 的卷积核进行卷积操作,在进行卷积操作之前我们在图像周围填充 𝑝 层数据,输出的维度:
感受野:卷积神经网络每一层输出的特征图(featuremap)上的像素点在输 入图片上映射的区域大小,即特征图上的一个点对应输入图上的区 域。
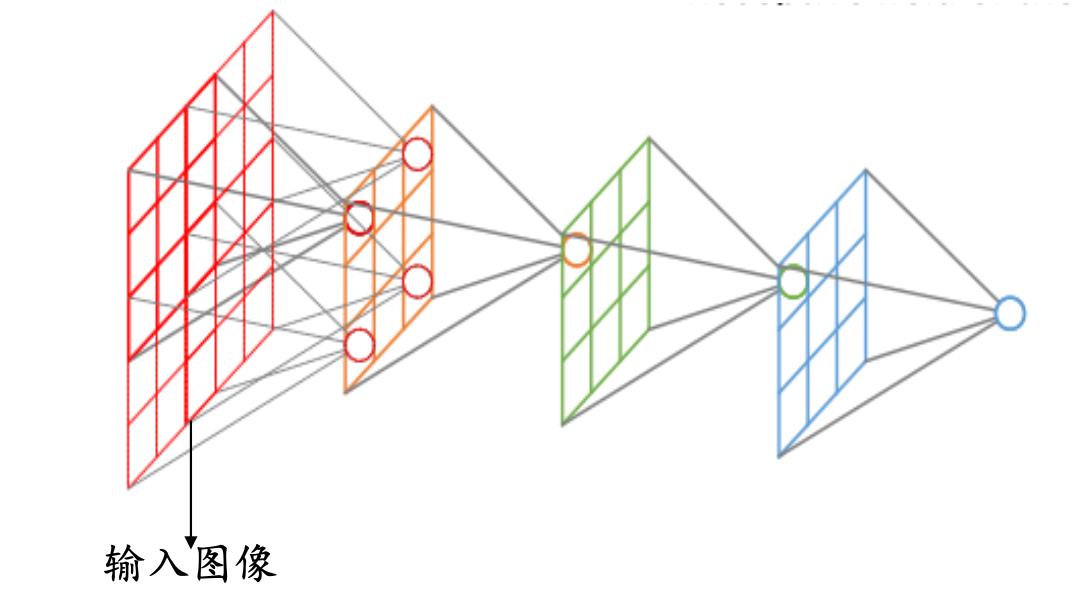
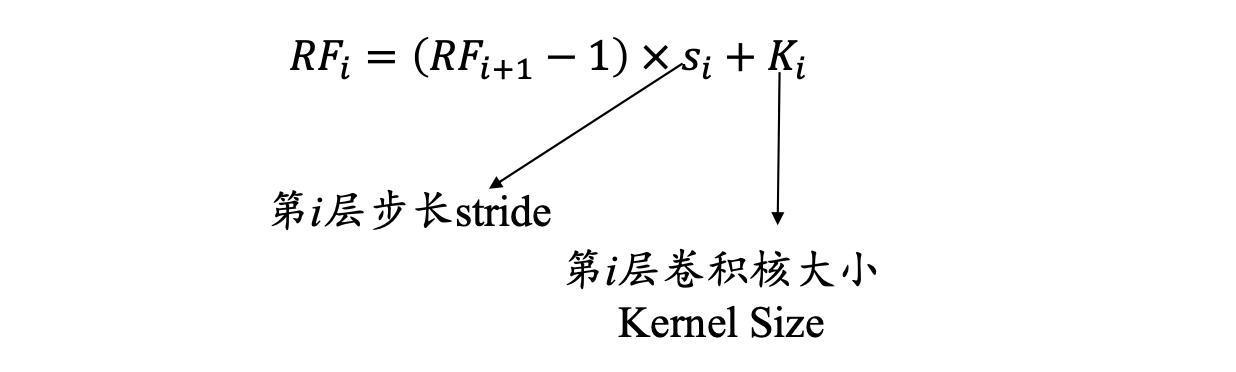
那么如何计算感受野的大小,可以采用从后往前逐层的计算方法:
- 第 i 层的感受野大小和第 *i-*1 层的卷积核大小和步长有关系,同时也与第 (*i-*1)层感受野大小有关
- 假设最后一层(卷积层或池化层)输出特征图感受野的大小(相对于其直 接输入而言)等于卷积核的大小
卷积层的深度(卷积核个数):一个卷积层通常包含多个尺寸一致的卷积核
【卷积核的大小一般为奇数奇数】 11,33,55,77都是最常见的。这是为什么呢?为什么没有偶数偶数?
(1)更容易padding
在卷积时,我们有时候需要卷积前后的尺寸不变。这时候我们就需要用到padding。假设图像的大小,也就是被卷积对象的大小为nn,卷积核大小为kk,padding的幅度设为(k-1)/2时,卷积后的输出就为(n-k+2*((k-1)/2))/1+1=n,即卷积输出为n*n,保证了卷积前后尺寸不变。但是如果k是偶数的话,(k-1)/2就不是整数了。
(2)更容易找到卷积锚点
在CNN中,进行卷积操作时一般会以卷积核模块的一个位置为基准进行滑动,这个基准通常就是卷积核模块的中心。若卷积核为奇数,卷积锚点很好找,自然就是卷积模块中心,但如果卷积核是偶数,这时候就没有办法确定了,让谁是锚点似乎都不怎么好。
激活函数
激活函数是用来加入非线性因素,提高网络表达能力,卷积神经网络中最常用的是ReLU,Sigmoid使用较少。
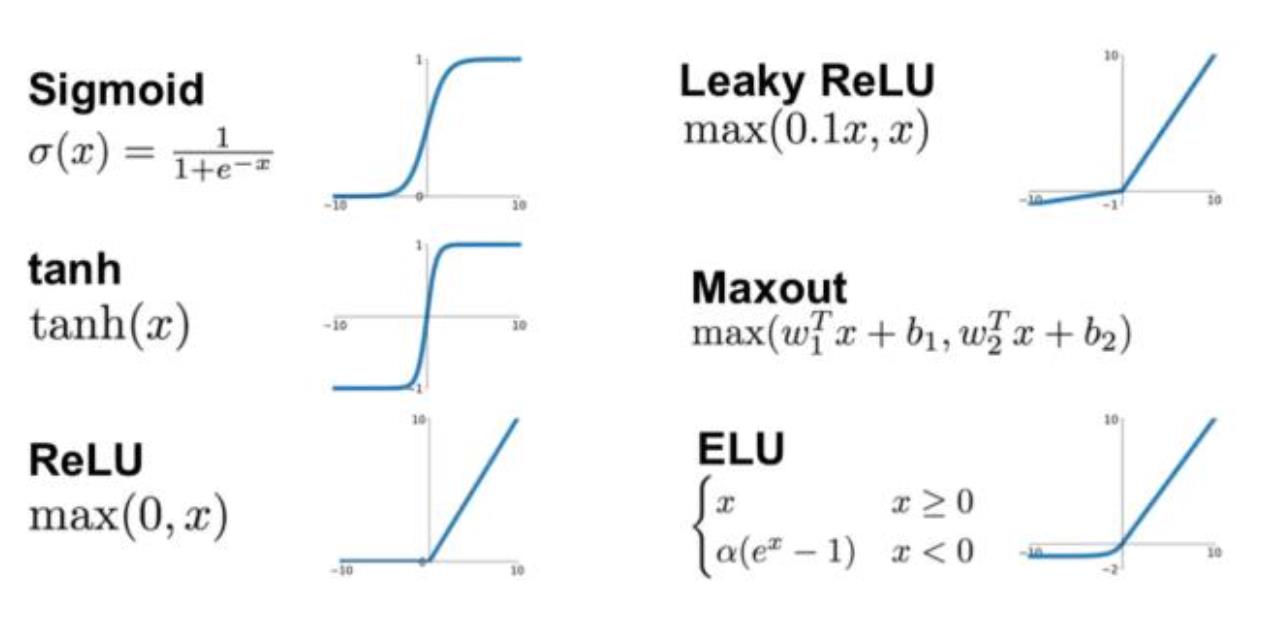
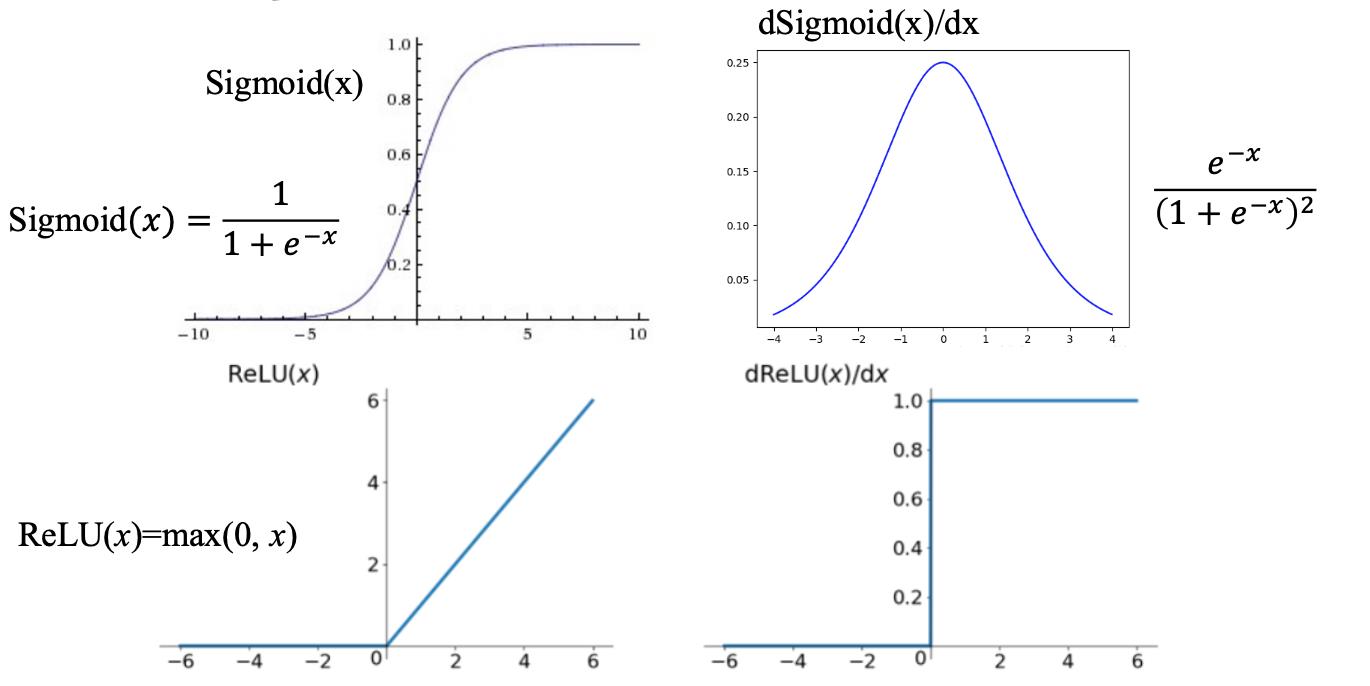
1. ReLU函数
f ( x ) = 0 , x < 0 x , x ≥ 0 f(x)= \\begincases 0,x<0\\\\[2ex] x,x \\ge 0 \\endcases f(x)=⎩⎨⎧0,x<0x,x≥0
ReLU函数的优点:
- 计算速度快,ReLU函数只有线性关系,比Sigmoid和Tanh要快很多
- 输入为正数的时候,不存在梯度消失问题
ReLU函数的缺点:
- 强制性把负值置为0,可能丢掉一些特征
- 当输入为负数时,权重无法更新,导致“神经元死亡”(学习率不 要太大)
2. Parametric ReLU
f ( x ) = α x , x < 0 x , x ≥ 0 f(x)= \\begincases \\alpha x,x<0\\\\[2ex] x,x \\ge 0 \\endcases f(x)=⎩⎨⎧αx,x<0x,x≥0
- 当 𝛼=0.01 时,称作Leaky ReLU
- 当 𝛼 从高斯分布中随机产生时,称为Randomized ReLU(RReLU)
PReLU函数的优点:
- 比sigmoid/tanh收敛快
- 解决了ReLU的“神经元死亡”问题
PReLU函数的缺点:需要再学习一个参数,工作量变大
3. ELU函数
f ( x ) = α ( e x − 1 ) , x < 0 x , x ≥ 0 f(x)= \\begincases \\alpha (e^x- 1),x<0\\\\[2ex] x,x \\ge 0 \\endcases f(x)=⎩⎨⎧α(ex−1),x<0x,x≥0
ELU函数的优点:
- 处理含有噪声的数据有优势
- 更容易收敛
ELU函数的缺点:计算量较大,收敛速度较慢
- CNN在卷积层尽量不要使用Sigmoid和Tanh,将导致梯度消失。
- 首先选用ReLU,使用较小的学习率,以免造成神经元死亡的情况。
- 如果ReLU失效,考虑使用Leaky ReLU、PReLU、ELU或者Maxout,此时一般情况都可以解决
特征图
- 浅层卷积层:提取的是图像基本特征,如边缘、方向和纹理等特征
- 深层卷积层:提取的是图像高阶特征,出现了高层语义模式,如“车轮”、“人脸”等特征
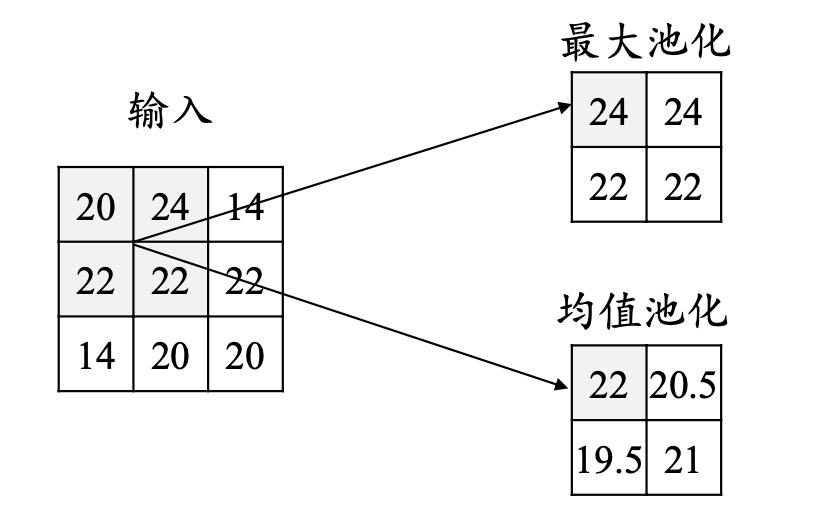
池化层
池化操作使用某位置相邻输出的总体统计特征作为该位置 的输出,常用最大池化(max-pooling)和均值池化(average- pooling)。
池化层不包含需要训练学习的参数,仅需指定池化操作的核大小、操作步幅以及池化类型。
池化的作用:
- 减少网络中的参数计算量,从而遏制过拟合
- 增强网络对输入图像中的小变形、扭曲、平移的鲁棒性(输入里的微 小扭曲不会改变池化输出——因为我们在局部邻域已经取了最大值/ 平均值)
- 帮助我们获得不因尺寸而改变的等效图片表征。这非常有用,因为 这样我们就可以探测到图片里的物体,不管它在哪个位置
全连接层
- 对卷积层和池化层输出的特征图(二维)进行降维
- 将学到的特征表示映射到样本标记空间的作用
输出层
对于分类问题:使用Softmax函数
y
i
=
e
z
i
∑
i
=
1
n
e
z
i
y_i = \\frace^z_i\\sum_i = 1^ne^z_i
yi=∑i=1neziezi
以上是关于转载深度学习-卷积神经网络(CNN)的主要内容,如果未能解决你的问题,请参考以下文章 深度学习实战——卷积神经网络/CNN实践(LeNetResnet) 深度学习方法:卷积神经网络CNN经典模型整理Lenet,Alexnet,Googlenet,VGG,Deep Residual Learning
对于回归问题:使用线性函数
y
i
=
∑
m
=
1
M
w
i
m