STM32蓝牙控制循迹避障小车——2.循迹模块
Posted 灵风_Brend
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32蓝牙控制循迹避障小车——2.循迹模块相关的知识,希望对你有一定的参考价值。
STM32蓝牙控制循迹避障小车源代码——2.循迹模块
注意-所需模块:
接线:四个循迹模块(从左到右分别为1,2,3,4)
B4–第1个循迹模块的D0
B5–第2个循迹模块的D0
B6–第3个循迹模块的D0
B7–第4个循迹模块的D0
代码
所有的代码都是直接从工程里面复制的,实测是没有问题的。
参考文章: 基于STM32F103C8T6的循迹避障小车完整制作过程
我这里再简单总结一下:
-
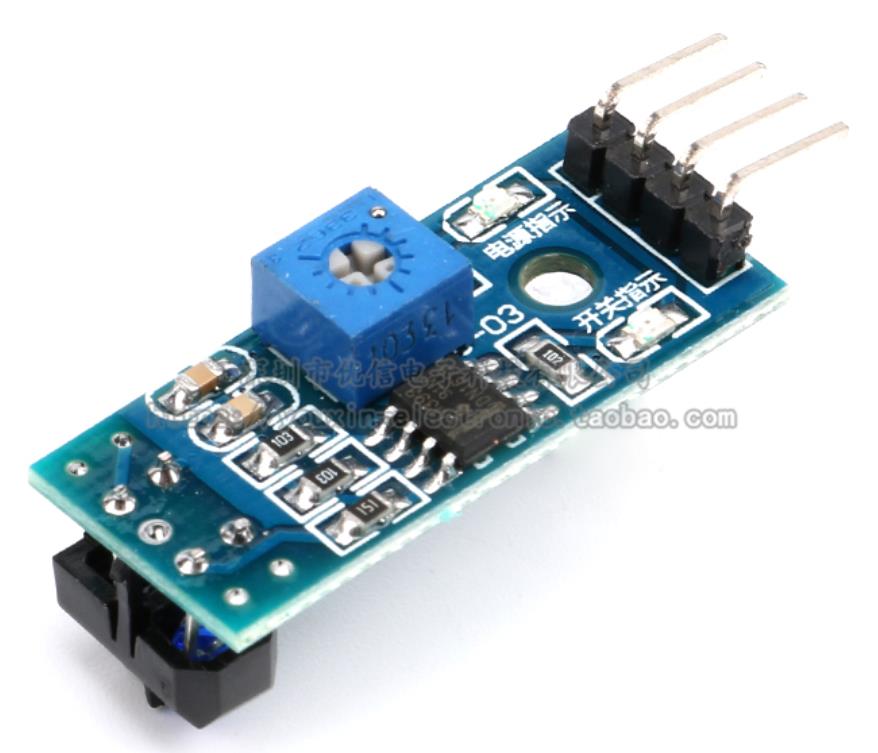
四个IO口,VCC,GND,A0,D0.
用3个,即VCC,GND,D0(输出高低电平)
当模块检测到黑线的时候,D0输出高电平,正常情况下D0输出处低电平。 -
定义B4,B5,B6,B7引脚,分别接到4个循迹模块上的D0口。
-
四个循迹模块从左到右依次为: 1 2 3 4
如果4个全部没有读取黑线,直走; Forward();
如果2,3读取黑线,直走; Forward();
如果2读取黑线,左转; Turn_left();
如果3读取黑线,右转; Turn_right();
如果1读取黑线,大左转; Big_Turn_left();
如果4读取黑线,大右转; Big_Turn_right();
xunji.c
#include "XUNJI.H"
// 1 2 3 4 : B4 B5 B6 B7
void xunji_config(void)//引脚初始化
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能GPIOB
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU;//上拉输入
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);//初始化B4,B5,B6,B7
void Read_xunji_Date(void)//读取两个循迹模块的电平
xunji_1;
xunji_2;
xunji_3;
xunji_4;
xunji.h:
#ifndef __XUNJI_H
#define __XUNJI_H
#include "stm32f10x.h"
//定义B4,B5引脚读取循迹模块D0
#define xunji_1 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_4)
#define xunji_2 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5)
#define xunji_3 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_6)
#define xunji_4 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)
void xunji_config(void);
void Read_xunji_Date(void);
#endif
测试
将上面两个代码写进工程里,在主函数里写进以下代码。
main.c
#include "stm32f10x.h"
#include "moter.h"
#include "delay.h"
#include "xunji.h"
#include "usart.h"
//循迹模块从左到右为: 1 2 3 4 : B4 B5 B6 B7
int main(void)
delay_init(); //延时初始化
TIM3_PWM_Init(); //电机pwm TIM3
xunji_config(); //引脚初始化
while(1)
Read_xunji_Date();//读取循迹值
if(xunji_1==0&&xunji_2==0&&xunji_3==0&&xunji_4==0)//如果4个全部没有读取黑线,直走; Forward();
Forward(500);
delay_ms(5);
if(xunji_1==0&&xunji_2==1&&xunji_3==1&&xunji_4==0)//如果2,3读取黑线,直走; Forward();
Forward(500);
delay_ms(5);
if(xunji_1==0&&xunji_2==1&&xunji_3==0&&xunji_4==0)//如果2读取黑线,左转; Turn_left();
Turn_left(500);
delay_ms(5);
if(xunji_1==0&&xunji_2==0&&xunji_3==1&&xunji_4==0)//如果3读取黑线,右转; Turn_right();
Turn_right(500);
delay_ms(5);
if(xunji_1==1&&xunji_2==0&&xunji_3==0&&xunji_4==0)//如果1读取黑线,大左转; Big_Turn_left();
Big_Turn_left(200);
delay_ms(5);
if(xunji_1==0&&xunji_2==0&&xunji_3==0&&xunji_4==1)//如果4读取黑线,大右转; Big_Turn_right();
Big_Turn_right(200);
delay_ms(5);
工程项目:
STM32蓝牙控制循迹避障小车–测试2 循迹模块.zip
下一节我会写舵机和超声波
以上是关于STM32蓝牙控制循迹避障小车——2.循迹模块的主要内容,如果未能解决你的问题,请参考以下文章