Linux应用开发第四章Linux进程间通信应用开发
Posted 韦东山
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux应用开发第四章Linux进程间通信应用开发相关的知识,希望对你有一定的参考价值。
文章目录
4 Linux进程间通信应用开发
4.1 初识进程
在日常工作/学习中,读者可能会经常听到如下一些词:“作业”,“任务”,“开了几个线程”,“创建了几个进程”,“多线程”,“多进程”等等。如果系统学习过《操作系统》这门课程,相信大家对这些概念都十分了解。但对很多电子、电气工程专业(或是其他非计算机专业)的同学来说,由于这门课程不是必修课程,我们脑海中可能就不会有这些概念,听到这些概念的时候就会不知所云,不过没有关系,先让我们克服对这些概念的恐惧。比如小时候刚开始学习数学的时候,先从正整数/自然数开始学习,然后逐步接触到分数、小数、负数、有理数、无理数、实数,再到复数等等。这些操作系统中的概念也是这样,让我们从初级阶段开始学起,逐步攻克这些新概念背后的真正含义。
本篇主要讨论linux进程间通信方式,这个主题拆分开始来看,分为三个部分:linux(操作系统)、进程、进程间通信。Linux操作系统本篇暂且不谈,我们主要来关注后两个部分:进程,以及进程间通信。在探讨进程间通信之前,让我们先关注一个知识点概念----进程。
4.1.1 进程的概念
4.1.1.1 程序
在探讨进程之前,先思考一个问题:什么是程序?
嵌入式软件工程师每天的工作/学习内容就是看C/C++源代码、分析C/C++源代码、编写C/C++源代码(有人会说,应该还有最重要的调试程序,我每天的工作日常是三分写程序,七分调试程序,调试程序去哪里了,大家别着急,这里先卖一个关子)。这些独立的源代码就是一个个程序。它们有一个共同特点,在我们阅读、分析、编写的过程中,此刻都是静态的,它们存储在我们的硬盘上、公司的服务器上。
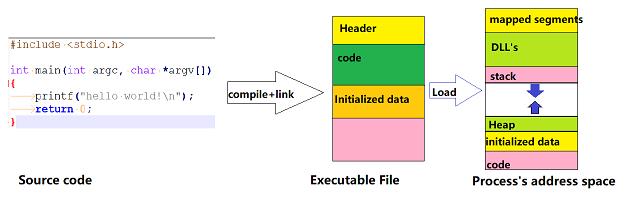
程序:存储在磁盘上的指令和数据的有序集合。如下就是一个程序,此刻它正安静地躺在硬盘上。
01 #include <stdio.h>
02
03 int main(int argc, char *argv[])
04
05 printf("hello world!\\n");
06 return 0;
07
4.1.1.2 进程
有了上面程序的概念,先直接给出进程的定义。
进程:具有一定独立功能的程序在一个数据集合上的一次动态执行过程。它是动态的,包括创建、调度、执行和消亡(由操作系统完成的)。
定义中的每个词分开来我们都能理解,但是组合到一起成为一个句子时,我们又不知道什么意思了。图灵奖得主Pascal之父尼古拉斯·沃斯,提出过一个著名的公式:程序=算法+数据结构。所谓算法就是解决一个问题的方法,程序就是使用算法对特定数据进行处理,这些数据是一个广义上的概念,不单单指像1,2,3,…等等这样的数据。因此用更直白的语言来说,程序开始运行,对数据进行分析处理的过程就是一个进程。
4.1.1.3 进程和程序的联系
-
程序是产生进程的基础。
-
程序的每次执行构成不同的进程。
-
进程是程序功能的体现(还记得之前提到的程序员日常工作中的一个重要事项----调试程序吗?调试的过程实际上就是程序的执行,就是本次程序功能的体现,因此这个时候它就是一个进程)。
-
通过多次执行,一个程序可对应多个进程;通过调用关系,一个进程可包含多个程序。
4.1.1.4 进程和程序的区别
| 程序 | 进程 | |
|---|---|---|
| 状态 | 静态的,是有序代码的集合 | 动态的,是程序功能的执行过程 |
| 生命期 | 永久的,长久保存在存储设备上 | 暂时的,一个程序执行结束,则它对应的进程结束 |
下图反应了从程序到进程的变化过程。
我们以一个生活中的例子来加深对进程和程序的理解:
1.有一位计算机科学家,他的女儿要过生日了,他准备给女儿做一个生日蛋糕,于是他去找了一本菜谱,跟着菜谱学习做蛋糕。
菜谱=程序 科学家=CPU 做蛋糕的原材料=数据 做蛋糕的过程=进程
2.科学家正在做蛋糕的时候,突然他的小儿子跑过来,说他的手被扎破了,于是科学家又去找了一本医疗手册,给小儿子处理伤口,处理完伤口之后,继续做生日蛋糕
医疗手册=新程序 给小儿子处理伤口=新进程
从做蛋糕切换到优先包扎伤口=进程切换 处理完伤口继续做生日蛋糕=进程恢复
介绍到这里,希望读者对进程已经建立起一些基础概念了,有关进程的深入部分,我们在这里暂且先不介绍,比如进程的组成包括哪些(代码段,用户数据段,系统数据段)?进程的类型有哪些?进程的状态有哪些等等?这些深入内容,在我们掌握了进程的基础知识之后,读者有兴趣的话,可以查阅相关书籍资料。
4.1.2 进程的操作(创建、结束、回收)
4.1.2.1 创建进程
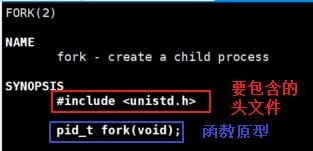
使用fork函数来创建一个进程
头文件: #include <unistd.h>
函数原型: pid_t fork(void);
返回值: 成功时,父进程返回子进程的进程号(>0的非零整数),子进程中返回0;通过fork函数的返回值区分父子进程。
父进程: 执行fork函数的进程。
子进程: 父进程调用fork函数之后,生成的新进程。
请重点注意:这个函数的返回值和我们接触的绝大部分函数的返回值不一样。
一般地,一个函数的返回值只有一个值,但是该函数的返回值却有两个。实际上关于这个函数的返回值究竟有几个,可以换一种方式来理解,因为这个函数执行之后,系统中会存在两个进程----父进程和子进程,在每个进程中都返回了一个值,所以给用户的感觉就是返回了两个值。
进程的特点:
-
在linux中,一个进程必须是另外一个进程的子进程,或者说一个进程必须有父进程,但是可以没有子进程。
-
子进程继承了父进程的内容,包括父进程的代码,变量,pcb,甚至包括当前PC值。在父进程中,PC值指向当前fork函数的下一条指令地址,因此子进程也是从fork函数的下一条指令开始执行。父子进程的执行顺序是不确定的,可能子进程先执行,也可能父进程先执行,取决于当前系统的调度。
-
父子进程有独立的地址空间、独立的代码空间,互不影响,就算父子进程有同名的全局变量,但是由于它们处在不同的地址空间,因此不能共享。
-
子进程结束之后,必须由它的父进程回收它的一切资源,否则就会成为僵尸进程。
-
如果父进程先结束,子进程会成为孤儿进程,它会被INIT进程收养,INIT进程是内核启动之后,首先被创建的进程。
Tips:
在linux下,当我们不熟悉某个系统接口API函数时(比如不知道调用这个函数需要包含的头文件,不知道这个函数的每个参数的意义等等),我们可以在ubuntu下使用man命令来查看这个函数的说明。

示例程序(参考:jz2440\\process\\1th_create_process\\create_process.c)
01 /**********************************************************************
02 * 功能描述: 创建一个子进程
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include <stdio.h>
12 #include <stdlib.h>
13 #include <unistd.h>
14 #include <sys/types.h>
15
16 int main(int argc, char *argv[])
17
18 pid_t pid;
19
20 pid = fork(); // 创建子进程
21
22 if (pid == 0) // 子进程
23 int i = 0;
24 for (i = 0; i < 5; i++)
25 usleep(100);
26 printf("this is child process i=%d\\n", i);
27
28
29
30 if (pid > 0) // 父进程
31 int i = 0;
32 for (i = 0; i < 5; i++)
33 usleep(100);
34 printf("this is parent process i=%d\\n", i);
35
36
37
38 while(1); //不让进程结束,以便我们查看进程的一些状态信息
39 return 0;
40
JZ2440实验
在jz2440开发板上实验,读者首先需要创建好NFS文件系统,jz2440开发板从网络文件系统启动,以便运行在ubuntu上编译好的可执行文件,关于如何搭建NFS文件系统请参考视频教程《u-boot_内核_根文件系统(ARM裸机1期加强版与2期驱动大全间的衔接)》。读者也可以在ubuntu上执行,将编译器从“arm-linux-gcc”换成“gcc”即可。
- 编译程序
arm-linux-gcc create_process.c -o create_process
- 将可执行文件test拷贝到NFS文件系统对应的目录下
cp create_process /work/nfs_root/first_fs
- 在jz2440开发板的串口下此时能看到该可执行文件

-
执行可执行文件
”&”表示在后台执行,这样我们可以继续在串口控制台下敲入命令,控制台能够接收到输入字符并作出响应;如果不加”&”,表示在前台执行,控制台不能对输入字符作出响应。
./create_process &
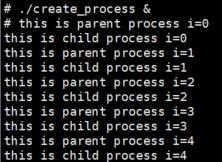
- top命令查看进程状态
top
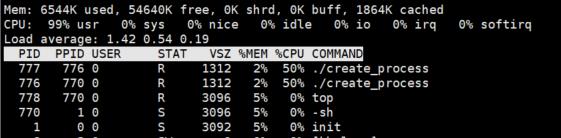
发现此时确实存在两个进程create_process,其中一个进程PID是777(它的父进程PID是776),另外一个进程PID是776(它的父进程PID是770)。
4.1.2.2 结束进程
使用exit函数来结束一个进程
头文件: #include <stdlib.h>
函数原型: void exit (int status)
使用_exit函数来结束一个进程
头文件: #include <unistd.h>
函数原型: void _exit(int status);
两个函数的区别是:exit结束进程时会刷新缓冲区,_exit不会;
这两个退出函数和return函数又有什么区别呢?exit和 _ exit函数是返回给操作系统的,return函数是当前函数返回,返回到调用它的函数中,如果正好是在main函数中,return函数也返回给了操作系统,这个时候return和exit、_exit起到了类似的作用。
程序实验:验证exit和_exit的区别
示例1:使用exit退出(参考:jz2440\\process\\2th_exit_process\\exit_process.c)
01 /**********************************************************************
02 * 功能描述: 使用exit退出当前进程
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10 #include <stdio.h>
11 #include <stdlib.h>
12
13 int main(int argc, char *argv[])
14
15 printf("hello world\\n");
16 printf("will exit");
17 exit(0); //使用_exit退出
18
示例2:使用_exit退出(参考:jz2440\\process\\3th_exit_process\\exit_process.c)
01 /**********************************************************************
02 * 功能描述: 使用_exit退出当前进程
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10 #include <stdio.h>
11 #include <stdlib.h>
12
13 int main(int argc, char *argv[])
14
15 printf("hello world\\n");
16 printf("will exit");
17 _exit(0); //使用_exit退出
18
在两个示例程序中,第15行比第16行的打印语句多了一个“\\n”,它会强制将待打印的字符刷新到缓冲区,为了对比exit和_exit的区别,在第16行中就没有加上“\\n”,按照上面两个退出函数的区别,示例1应该会同时打印“hello world”和“will exit”,示例2程序只会打印“hello world”,不会打印“will exit”,那么到底是不是这样呢?我们在jz2440下验证一下。
JZ2440实验
示例1
- 编译
arm-linux-gcc exit_process.c -o exit_process
- 拷贝到NFS
cp exit_process /work/nfs_root/first_fs
- 运行
./exit_process
运行结果,确实同时打印了“hello world”和“will exit”
4.1.2.3 回收进程
使用wait函数来回收一个进程
头文件: #include <sys/types.h>
#include <sys/wait.h>
函数原型: pid_t wait(int *status);
返回值: 成功返回子进程的进程号,失败返回-1
使用waitpid函数来回收一个进程
头文件: #include <sys/types.h>
#include <sys/wait.h>
函数原型: pid_t waitpid(pid_t pid, int *status, int options);
返回值: 成功返回子进程的进程号,失败返回-1
程序示例:子进程退出,父进程回收子进程(参考:jz2440\\process\\4th_exit_wait\\exit_wait.c)
1 /**********************************************************************
02 * 功能描述: 使用exit退出子进程,父进程使用waitpid回收子进程的资源
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10 #include <unistd.h>
11 #include <stdio.h>
12 #include <stdlib.h>
13 #include <sys/types.h>
14 #include <sys/wait.h>
15
16 int main(int argc, char *argv[])
17
18 int status = -1;
19 pid_t pid;
20
21 pid = fork();
22 if (pid == 0) //子进程
23 printf("fork\\n");
24 exit(1);
25 else if (pid > 0) //父进程
26 pid = waitpid(pid, &status, 0);
27 printf("status=0x%x\\n", status);
28 else
29 perror("fork\\n");
30
31
32 return 0;
33
JZ2440实验
- 编译
arm-linux-gcc exit_wait.c -o exit_wait
- 拷贝到NFS
cp exit_wait /work/nfs_root/first_fs
- 运行
./exit_wait
运行结果

4.2 进程为什么需要通信
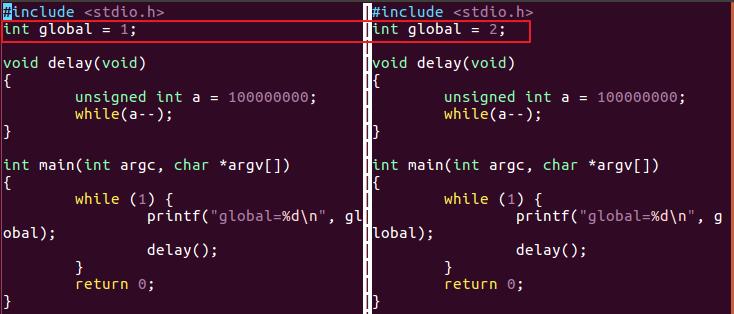
先让我们看如下两个简单的程序,这两个程序中都有一个同名全局变量“global”,唯一的区别是这个全局变量的初始值不同。说明:以下两个示例程序是为了让我们理解进程的一个特点,因此实验环境是Ubuntu虚拟机。
程序1:
01 #include <stdio.h>
02 int global = 1;
03
04 void delay(void)
05
06 unsigned int a = 1000000;
07 while(a--);
08
09
10 int main(int argc, char *argv[])
11
12 while (1)
13 printf("global=%d\\n", global);
14 delay();
15
16 return 0;
17
程序2:
01 #include <stdio.h>
02 int global = 2;
03
04 void delay(void)
05
06 unsigned int a = 1000000;
07 while(a--);
08
09
10 int main(int argc, char *argv[])
11
12 while (1)
13 printf("global=%d\\n", global);
14 delay();
15
16 return 0;
17
两个程序的唯一区别如下红框所示:
- 编译程序
gcc test1.c -o test1
gcc test2.c -o test2
- 运行程序
./test1
./test2

程序1运行结果
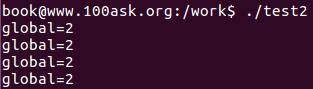
程序2运行结果
我们发现,两个程序运行之后,当前进程中的全局变量global的值并不会改变,它不会被改变成另外一个进程中的值,由此引出的进程的一个特点:**进程资源的唯一性,不共享性,它不能访问别的进程中的数据(地址空间),也不能被别的进程访问本身的数据(地址空间)。**每个进程对其他进程而言,就是一个黑盒(后面读者学习到线程的时候,会发现在这个特性上,线程是有别于进程的)。
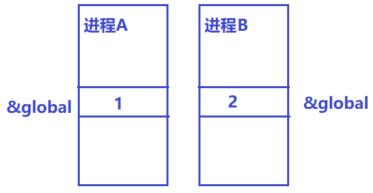
那么为什么会这样呢?这是因为操作系统为了保证系统的安全(进程A奔溃不会影响进程B,进程B仍然会继续运行),它会为每个进程分配特定的地址空间,每个进程只能在这个特定的地址空间执行指令、访问数据,如下图所示。程序需要访问某个变量时,都是通过变量地址去访问该变量的,在不同的进程中,同名变量对应不同的地址(处在当前进程地址空间范围内),进程无法访问分配给它的地址范围之外的地址空间,自然就无法获得其他进程中的变量值。
进程间为何需要通信呢?从上面的两个示例程序中,可以得知:不同进程之间无法互相访问对方的地址空间。但是在我们实际的项目开发中,为了实现各种各样的功能,不同进程之间一定需要数据交互,那么我们应该如何实现进程间数据交互呢?这就是进程间通信的目的:实现不同进程之间的数据交互。
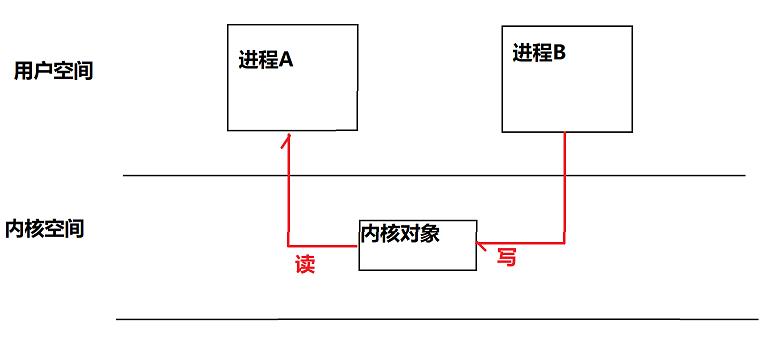
在linux下,内存空间被划分为用户空间和内核空间,应用程序开发人员开发的应用程序都存在于用户空间,绝大部分进程都处在用户空间;驱动程序开发人员开发的驱动程序都存在于内核空间。
在用户空间,不同进程不能互相访问对方的资源,因此,在用户空间是无法实现进程间通信的。为了实现进程间通信,必须在内核空间,由内核提供相应的接口来实现,linux系统提供了如下四种进程通信方式。
| 进程间通信方式 | 分类 |
|---|---|
| 管道通信 | 无名管道、有名管道 |
| IPC通信 | 共享内存、消息队列、信号灯 |
| 信号通信 | 信号发送、接收、处理 |
| socket通信 | 本地socket通信,远程socket通信 |
linux有一个最基本的思想----“一切皆文件”,内核中实现进程间通信也是基于文件读写思想。不同进程通过操作内核里的同一个内核对象来实现进程间通信,如下图所示,这个内核对象可以是管道、共享内存、消息队列、信号灯、信号,以及socket。
4.3 进程通信之管道通信
管道分为无名管道和有名管道,其特点如下
| 类型 | 特点 |
|---|---|
| 无名管道 | 在文件系统中没有文件节点,只能用于具有亲缘关系的进程间通信(比如父子进程) |
| 有名管道 | 在文件系统中有文件节点,适用于在同一系统中的任意两个进程间通信 |
4.3.1 无名管道
4.3.1.1 特点
无名管道实际上就是一个单向队列,在一端进行读操作,在另一端进行写操作,所以需要两个文件描述符,描述符fd[0]指向读端,fd[1]指向写端。它是一个特殊的文件,所以无法使用简单open函数创建,我们需要pipe函数来创建。它只能用于具有亲缘关系的两个进程间通信。

4.3.1.2 创建无名管道
1.头文件#include <unistd.h>
2.函数原型: int pipe(int fd[2])
3.参数: 管道文件描述符,有两个文件描述符,分别是fd[0]和fd[1],管道有一个读端fd[0]和一个写端fd[1]
4.返回值: 0表示成功;1表示失败
4.3.1.3 读、写、关闭管道
1.读管道 read,读管道对应的文件描述符是fd[0]
2.写管道 write,写管道对应的文件描述符是fd[1]
3.关闭管道 close,因为创建管道时,会同时创建两个管道文件描述符,分别是读管道文件描述符fd[0]和写管道文件描述符fd[1],因此需要关闭两个文件描述符
4.3.1.4 无名管道实现进程间通信
程序示例1
(参考:jz2440\\process_pipe\\1th_write_pipe\\my_pipe_write.c)
01 /**********************************************************************
02 * 功能描述: 创建一个管道,并向管道中写入字符串,然后从管道中读取,验证
03 能否读取之前写入的字符串
04 * 输入参数: 无
05 * 输出参数: 无
06 * 返 回 值: 无
07 * 修改日期 版本号 修改人 修改内容
08 * -----------------------------------------------
09 * 2020/05/16 V1.0 zh(ryan) 创建
10 ***********************************************************************/
11 #include <stdio.h>
12 #include <stdlib.h>
13 #include <unistd.h>
14
15 int main(int argc, char *argv[])
16
17 int fd[2];
18 int ret = 0;
19 char write_buf[] = "Hello linux";
20 char read_buf[128] = 0;
21
22 ret = pipe(fd);
23 if (ret < 0)
24 printf("create pipe fail\\n");
25 return -1;
26
27 printf("create pipe sucess fd[0]=%d fd[1]=%d\\n", fd[0], fd[1]);
28
29 //向文件描述符fd[1]写管道
30 write(fd[1], write_buf, sizeof(write_buf));
31
32 //从文件描述符fd[0]读管道
33 read(fd[0], read_buf, sizeof(read_buf));
34 printf("read_buf=%s\\n", read_buf);
35
36 close(fd[0]);
37 close(fd[1]);
38 return 0;
39
JZ2440实验
- 编译
arm-linux-gcc my_pipe_write.c -o my_pipe_write
- 拷贝到NFS文件系统
cp my_pipe_write /work/nfs_root/first_fs
- 运行
./my_pipe_write
运行结果,发现能够正确读到管道中的字符串” Hello linux”。
程序示例2
在利用无名管道实现进程间通信之前,先让我们看一下如下的程序:我们知道父子进程的执行顺序是不确定的,是受系统调度的。我们在父进程中创建一个子进程,我们想让父进程控制子进程的运行,父进程设置“process_inter=1”,当“process_inter=1”时,子进程才会执行打印操作,否则子进程不执行打印操作。我们看如下的程序能够实现我们的目的吗?
(参考:jz2440\\process_pipe\\2th_comm\\test.c)
01 /**********************************************************************
02 * 功能描述: 1.在父进程中创建一个子进程,
03 2.父进程执行完后,将变量process_inter赋值为1;
04 3.子进程判断process_inter为1则执行后面的打印语句,否则不执行。
05 * 输入参数: 无
06 * 输出参数: 无
07 * 返 回 值: 无
08 * 修改日期 版本号 修改人 修改内容
09 * -----------------------------------------------
10 * 2020/05/16 V1.0 zh(ryan) 创建
11 ************************************************************以上是关于Linux应用开发第四章Linux进程间通信应用开发的主要内容,如果未能解决你的问题,请参考以下文章