-pytorch实现深度神经网络与训练
Posted 城南皮卡丘
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了-pytorch实现深度神经网络与训练相关的知识,希望对你有一定的参考价值。
目录
1. 随机梯度下降算法
在深度学习网络中,通常需要设计一个模型的损失函数来约束训练过程,如针对分类问题可以使用交叉熵损失,针对回归问题可以使用均方根误差损失等。模型的训练并不是漫无目的的,而是朝着最小化损失函数的方向去训练,这时就会用到梯度下降类的算法。
梯度下降法(gradient descent)是一个一阶最优化算法,通常也称为最速下降法,是通过函数当前点对应梯度(或者是近似梯度)的反方向,使用规定步长距离进行迭代搜索,从而找到一个函数的局部极小值的算法,最好的情况是希望找到全局极小值。但是在使用梯度下降算法时,每次更新参数都需要使用所有的样本。如果对所有的样本均计算一次,当样本总量特别大时,对算法的速度影响非常大,所以就有了随机梯度下降( stochastic gradient descent,SGD)算法。它是对梯度下降法算法的一种改进,且每次只随机取一部分样本进行优化,样本的数量一般是2的整数次幂,取值范围是32~256,以保证计算精度的同时提升计算速度,是优化深度学习网络中最常用的一类算法。
SGD算法及其一些变种,是深度学习中应用最多的一类算法。在深度学习中SGD通常指小批随机梯度下降( mini-batch gradient descent )算法,其在训练过程中,通常会使用一个固定的学习率进行训练。即

式中, 是第t步的梯度,n则是学习率,随机梯度下降算法在优化时,完全依赖于当前batch数据计算得到的梯度,而学习率
是第t步的梯度,n则是学习率,随机梯度下降算法在优化时,完全依赖于当前batch数据计算得到的梯度,而学习率 则是调整梯度影响大小的参数,通过控制学习率的大小,一定程度上可以控制网络的训练速度。
则是调整梯度影响大小的参数,通过控制学习率的大小,一定程度上可以控制网络的训练速度。
随机梯度下降虽然在大多数情况下都很有效,但其还存在一些缺点,如很难确定一个合适的学习率,而且所有的参数使用同样的学习率可能并不是最有效的方法。针对这种情况,可以采用变化学习率的训练方式,如控制网络在初期以大的学习率进行参数更新,后期以小的学习率进行参数更新。随机梯度下降的另一个缺点就是,其更容易收敛到局部最优解,而且当落入局部最优解后,很难跳出局部最优解的区域。
针对随机梯度下降算法的缺点,动量的思想被引入优化算法中。动量通过模拟物体运动时的惯性来更新网络中的参数,即更新时在一定程度上会考虑之前参数更新的方向,同时利用当前batch计算得到的梯度,将两者结合起来计算出最终参数需要更新的大小和方向。在优化时引入动量思想旨在加速学习,特别是面对小而连续且含有很多噪声的梯度。利用动量在一定程度上不仅增加了学习参数的稳定性,而且会更快地学习到收敛的参数。在引入动量后,网络的参数按照下面的方式更新:

在上述公式中, 为当前动量的累加,
为当前动量的累加, 属于动量因子,用于调整上一步动量对参数更新时的重要程度。引人动量后,在网络更新初期,可利用上一次参数更新,此时下降方向一致,乘以较大的能够进行很好的加速。在网络更新后期,随着梯度逐渐趋近于0,在局部最小值来回震荡的时候,利用动量使得更新幅度增大,跳出局部最优解的陷阱。
属于动量因子,用于调整上一步动量对参数更新时的重要程度。引人动量后,在网络更新初期,可利用上一次参数更新,此时下降方向一致,乘以较大的能够进行很好的加速。在网络更新后期,随着梯度逐渐趋近于0,在局部最小值来回震荡的时候,利用动量使得更新幅度增大,跳出局部最优解的陷阱。
Nesterov项( Nesterov动量)是在梯度更新时做出的校正,避免参数更新太快,同时提高灵敏度。在动量中,之前累积的动量 并不会直接影响当前的梯度所以Nesterov的改进就是让之前的动量直接影响当前的动量,即
并不会直接影响当前的梯度所以Nesterov的改进就是让之前的动量直接影响当前的动量,即
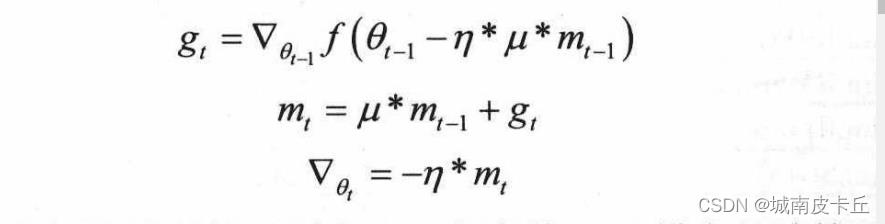
Nesterov动量和标准动量的区别在于,在当前batch梯度的计算上,Nesterov动量的梯度计算是在施加当前速度之后的梯度。所以,Nesterov动量可以看作是在标准动量方法上添加了一个校正因子,从而提升算法的更新性能。
在训练开始的时候,参数会与最终的最优值点距离较远,所以需要使用较大的学习率,经过几轮训练之后,则需要减小训练学习率。因此,在众多的优化算法中,不仅有通过改变更新时梯度方向和大小的算法,还有--些算法则是优化了学习率等参数的变化,如一系列自适应学习率的算法Adadelta、RMSProp及Adam等。
2.优化器
Pytorch中的optim模块提供了多种可直接使用的深度学习优化算法,无需人工实现随机梯度下降算法,直接调用即可。
| 类 | 算法名称 |
| torch.optim.Adadelta() | Adadelta算法 |
| torch.optim.Adagrad() | Adagrad算法 |
| torch.optim.Adam() | Adam算法 |
| torch.optim.Adamax() | Adamax算法 |
| torch.optim.ASGD() | 平均随机梯度下降算法 |
| torch.optim.LBFGS() | L-BFGS算法 |
| torch.optim.RMSprop() | RMSprop算法 |
| torch.optim.Rprop() | 弹性反向传播算法 |
| torch.optim.SGD() | 随机梯度下降算法 |
下面以Adam算法为例,介绍如何在pytorch中使用这些优化算法
import torch
torch.optim.Adam(params,lr=0.001,betas=(0.9,0.999),eps=1e-8)
"""
params:待优化参数的iterable或者定义了参数组的dict,通常为model.parameters()
lr:学习率,默认值为0.001
betas:用于计算梯度以及梯度平方的运行平均值的系数,默认为(0.9,0.999)
eps:为了增加计算数值的稳定性而加到分母中的项,默认为1e-8
weight_decay:权重惩罚(L2惩罚),默认值为0
"""
下面建立一个简单的测试网络,用于演示优化器的使用
import torch.nn as nn
class TestNet(nn.Module):
def __init__(self):
super(TestNet,self).__init__()
#定义隐藏层
self.hidden=nn.Sequential(nn.Linear(13,10),nn.ReLU())
#定义预测回归层
self.regression=nn.Linear(10,1)
# 定义网络层的向前传播路径
def forward(self,x):
x=self.hidden(x)
output=self.regression(x)
return output
#输出网络结构
testNet=TestNet()
"""
上面的程序我们已经建立了一个简单的神经网络,接下来我们定义优化器optim
"""
#第一种定义方式:为不同的层定义统一的学习率
optimizer=torch.optim.Adam(testNet.parameters(),lr=0.001)
#定义方式二:为不同的层定义不同的学习率
optimizer=torch.optim.Adam(
["params":testNet.hidden.parameters(),"lr":0.001,#隐藏层单独定义学习率
"params":testNet.regression.parameters(),"lr":0.002],#回归层单独定义学习率
lr=0.03#其他层定义统一的学习率
)
定义好优化器后,需要将optimizer.zero_grad()方法和optimizer.step()方法一起使用,对网络中的参数进行更新。其中optimizer.zero_grad)方法表示在进行反向传播之前,对参数的梯度进行清空; optimizer.step()方法表示在损失的反向传播loss.backward()方法计算出梯度之后,调用step()方法进行参数更新。如对数据集加载器dataset、深度网络testnet、优化器optimizer、损失函数loss_fn等,可使用下面的程序进行网络参数更新:
for input,target in dataset:
optimizer.zero_grad()#梯度清0
output=testNet(input)#计算预测值
loss=loss_fn(output,target)#计算损失
loss.backward()#损失后向传播
optimizer.step()#更新网络参数针对学习率,在pytorch中的torch,optim.lr_scheduler模块提供了优化器学习率调整方式,常用的几种如下:
(1)lr_scheduler.LambdaLR(optimizer,lr_lambda,last_epoch=-1):不同的参数组设置不同的学习调整策略,last_epoch参数用于设置何时开始调整学习率,last_epoch=-1表示学习率设置为初始值,在开始训练后准备调整学习率(last_epoch参数的设置)
(2)lr_scheduler.StepLR(optimizer,step_size,gamma=0.1,last_epoch=-1):等间隔调整学习率,学习率会每经过step_size指定的间隔调整为原来的gamma倍。这里的step_size所指的间隔是epoch的间隔。
(3)lr_scheduler.MultiStepLR(optimizer,milestones,gamma=0.1,last_epoch=-1):按照设定的间隔调整学习率。milestones参数通常使用一个列表来指定需要调整学习率的epoch数值,学习率会调整为原来的gamma倍。
(4)lr_scheduler.ExponentialLR(optimizer,gamma,last_epoch=-1):按照指数衰减调整学习率,学习率调整公式为:lr=lr*
(5)lr_scheduler.CosineAnnealingLR(optimizer,T_max,eta_min=0,last_epoch=-1):以余弦函数为周期,并在每个周期最大值时调整学习率,T_max表示在T_max个epoch后重新设置学习率,eta_min表示最小学习率,即每个周期的最小学习率不会小于eta_min。学习率调整公式为:

其中 表示在t时刻的学习率,
表示在t时刻的学习率, 为参数eta_min,
为参数eta_min, 为参数T_max。针对已经定义的学习率调整类,可以通过get_lr()方法获取当前的学习率。
为参数T_max。针对已经定义的学习率调整类,可以通过get_lr()方法获取当前的学习率。
3. 损失函数
深度学习的优化方法直接作用的对象是损失函数。在最优化、统计学、机器学习和深度学习等领域中经常能用到损失函数。损失函数就是用来表示预测与实际数据之间的差距程度。一个最优化问题的目标是将损失函数最小化,针对分类问题,直观的表现就是分类正确的样本越多越好。在回归问题中,直观的表现就是预测值与实际值误差越小越好。
pytorch中的nn模块提供了多种可直接使用的损失函数
| 类 | 算法名称 | 适用问题类型 |
| torch.nn.L1Loss() | 平均绝对值误差损失 | 回归 |
| torch.nn.MSELoss() | 均方误差损失 | 回归 |
| torch.nn.CrossEntropyLoss() | 交叉熵损失 | 多分类 |
| torch.nn.NLLLoss() | 负对数似然函数损失 | 多分类 |
| torch.nn.NLLLoss2d() | 图片负对数似然函数损失 | 图像分割 |
| torch.nn.KLDivLoss() | KL散度损失 | 回归 |
| torch.nn.BCELoss() | 二分类交叉熵损失 | 二分类 |
| torch.nn.MarginRankingLoss() | 评价相似度的损失 | |
| torch.nn.MultiLabelMarginLoss() | 多标签分类损失 | 多标签分类 |
| torch.nn.SmoothL1Loss() | 平滑的L1损失 | 回归 |
| torch.nn.SoftMarginLoss() | 多标签二分类问题的损失 | 多标签二分类 |
3.1 均方误差损失
torch.nn.MSELoss(size_average=None,reduce=None,reduction='mean')
其中参数的使用情况如下:
size_average:默认为True。计算的损失为每个batch的均值,否则为每个batch的和。
reduce:默认为True,此时计算的损失会根据size_average参数设定,是计算每个batch的均值或者和
reduction:通过指定参数取值为none、mean、sum来判断损失的计算公式。默认为mean,即计算的损失为每个batch的均值,如果设置为sum,则计算的损失为每个batch的和,如果设置为none,则表示不使用该参数。
对模型的预测输入x和目标y计算均方误差损失方式为:

如果reduction的取值为sum,则不除以N。
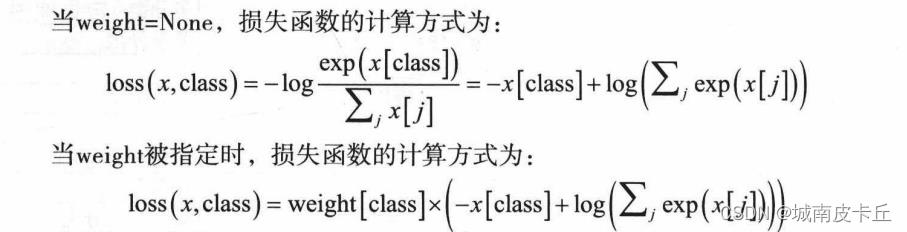
3.2 交叉熵损失
torch.nn.CrossEntropyLoss(weight=None,size_average=None,ignore_index=-100,reduce=None,reduction='mean')
交叉熵损失是将LogSoftMax和NLLLoss集成到一个类中,通常用于多分类问题,其参数的使用情况如下:
ignore_index:指定被忽略且对输入梯度没有贡献的目标值
size_average、reduce、reduction三个参数的使用情况同上。
weight:是1维的张量,包含n个元素,分别代表n类的权重,在训练样本不均衡时,非常有用,默认值为None。
4.防止过拟合
4.1 过拟合的概念
过拟合通常是指针对设计好的深度学习网络,在使用训练数据集时,在训练数据集上能够获得很高的识别精度(针对分类问题),或者很低的均方根误差(针对回归问题),但是把训练好的模型作用于测试集进行预测时,预测效果往往很不理想。
4.2 防止过拟合的方法
(1)增加数据量
更多的训练样本通常会使模型更加稳定,所以训练样本的增加不仅可以得到更有效的训练结果,也能在一定程度上防止模型过拟合,增强网络的泛化能力。但是如果训练样本有限,可以通过数据增强技术对现有的数据集进行扩充。数据增强则是通过已定的规则扩充数据,如在图像分类任务中,物体在图像中的位置、姿态、尺寸、图像的明暗等都会影响分类结果,所以可以通过平移、旋转、缩放等手段对数据进行扩充。
(2)合理的数据切分
针对现有的数据集,在训练深度学习网络时,可以将数据集进行切分为训练集、验证集和测试集(或者使用交叉验证的方法)
(3)正则化方法
正则化通常是在损失函数上添加对训练参数的惩罚范数,通过添加的范数惩罚对需要训练的参数进行约束,防止模型过拟合。常用的正则化参数有 和
和 范数,范数 惩罚项的目的是将参数的绝对值最小化,范数惩罚项的目的是将参数的平方和最小化。在固定的深度学习网络中,使用范数会趋于使用更少的参数,而其他的参数都是0.从而增加网络稀疏性,防止模型过拟合。而利用范数进行约束则会选择更多的参数,但是这些参数都会接近于0,防止模型过拟合。使用正则化方法防止过拟合非常有效。
范数,范数 惩罚项的目的是将参数的绝对值最小化,范数惩罚项的目的是将参数的平方和最小化。在固定的深度学习网络中,使用范数会趋于使用更少的参数,而其他的参数都是0.从而增加网络稀疏性,防止模型过拟合。而利用范数进行约束则会选择更多的参数,但是这些参数都会接近于0,防止模型过拟合。使用正则化方法防止过拟合非常有效。
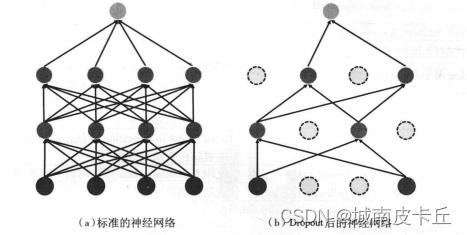
(4)Dropout
在深度学习网络中最常用的正则化技术是通过引入Dropout层,随机丢掉一些神经元,即在每个训练批次中,通过忽略一定百分比的神经元数量(通常是一半的神经元),减轻网络的过拟合现象。简单的来说,针对网络在前向传播的时候,让某个神经元的激活值以一定的概率p停止工作,这样可以使模型泛化性更强,因为这样训练得到的网络的鲁棒性会更强,不会过度依赖某些局部的特征。
(5)提前结束训练
防止网络过拟合的最直观的方式就是提前终止网络的训练,其通常将数据切分为训练集、验证集和测试集相结合。例如,当网络在验证集上的损失不在减小,或者精度不在增加时,即认为网络已经训练充分,应终止网络的继续训练。但是该操作可能会获得训练不充分的最终参数。
5. 网络参数初始化
5.1 网络参数初始化方法
在nn模块中的init模块下常用的参数初始化类,它们的功能如表:
| 方法(类) | 功能 |
| nn.init.uniform_(tensor,a=0.0,b=1.0) | 从均匀分布U(a,b)中生成值,填充输入的张量或变量 |
| nn.init.normal_(tensor,mean=0.0,std=1.0) | 从给定均值mean和标准差std的正态分布中生成值,填充输入的张量或变量 |
| nn.init.constant_(tensor,val) | 用val的值填充输入的张量或变量 |
| nn.init.eye_(tensor) | 用单位矩阵来填充输入二维张量或变量 |
| nn.init.dirac_(tensor) | 用Dirac delta函数来填充3,4,5维输入张量或变量。在卷积层尽可能多地保存输入通道特性 |
| nn.init.xavier_uniform_(tensor,gain=1.0) | 使用Glorot Initialization方法均匀分布生成值,生成随机数填充张量 |
| nn.init.xavier_normal_(tensor,gain=1.0) | 使用Glorot Initialization方法正态分布生成值,生成随机数填充张量 |
| nn.init.kaiming_uniform_(tensor,a=0,mode='fan_in',nonlinearity="leaky_relu") | 使用He initialization方法均匀分布生成值,生成随机数填充张量 |
| nn.init.kaiming_normal_(tensor,a=0,mode='fan_in',nonlinearity="leaky_relu") | 使用He initialization方法正态分布生成值,生成随机数填充张量 |
| nn.init.orthogonal_(tensor,gain=1) | 使用正交矩阵填充张量进行初始化 |
5.2 参数初始化方法应用实例
1.针对某一层的权重进行初始化
对某一层的权重进行初始化。以一个卷积层为例,先使用torch.nn.Conv2d()函数定义一个从3个特征映射到16个特征映射的卷积层,并且使用3*3的卷积核,然后使用标准正态分布的随机数方法进行初始化:
import torch
import matplotlib.pyplot as plt
#针对一个层的权重初始化方法
conv1=torch.nn.Conv2d(3,16,3)
#使用标准正态分布初始化权重
torch.manual_seed(12)#随机数初始化种子
torch.nn.init.normal(conv1.weight,mean=0,std=1)
#使用直方图可视化conv1.weight的分布情况
plt.figure(figsize=(8,6))
plt.hist(conv1.weight.data.numpy().reshape((-1,1)),bins=30)
plt.show()
"""
在上面的程序中使用conv1.weight可以获取conv1卷积层初始权重参数,
torch.manual_seed(12)操作则是定义一个随机数初始化种子,
便于torch.nn.init.normal()生成的随机数重复使用。
使用torch.nn.init.normal()函数时,第一个参数使用conv1.weight,
表示生成的随机数用来替换张量conv1.weight的原始数据,参数mean=O表示均值为0,
参数std=1表示标准差为1。在为conv1.weight重新初始化后,
可以将其中的数值分布可视化,得到的直方图如图3-4所示,生成的数据符合正态分布。
"""
#上面定义了conv1的卷积核权重,通过conv1.bias可以获取该层的偏置参数,
# 通过troch.nn.init.constant()函数使用0.1来初始化偏置
torch.nn.init.constant(conv1.bias,val=0.1)2.针对一个网络的权重初始化方法
对于多层网络每个层的参数初始化方法:
import torch
import torch.nn as nn
class TestNet(nn.Module):
def __init__(self):
super(TestNet,self).__init__()
self.conv1=nn.Conv2d(3,16,3)
self.hidden=nn.Sequential(
nn.Linear(100,100),
nn.ReLU(),
nn.Linear(100,50),
nn.ReLU()
)
self.cla=nn.Linear(50,10)
#定义网络的前向传播路径
def forward(self,x):
x=self.conv1(x)
x=x.view(x.shape[0],-1)
x=x.hidden(x)
output=self.cla(x)
return output
#输出我们的网络结构
testNet=TestNet()
print(testNet)
'''
在上述定义的网络结构中,一共有4个包含参数的层,分别是1个卷积层和3个全连接层。
如果想要对不同类型层的参数使用不同的方法进行初始化,可以先定义一个函数,
针对不同类型层使用不同初始化方法,自定义函数init_weights()
'''
#定义为网络中的每个层进行权重初始化的函数
def init_weights(m):
#如果是卷积层
if type(m) ==nn.Conv2d:
torch.nn.init.normal(m.weight,mean=0,std=0.5)
#如果是全连接层
if type(m) ==nn.Linear:
torch.nn.init.uniform(m.weight,a=-0.1,b=0.1)
m.bias.data.fill_(0.01)
"""
上面的程序中,如果层的type等于nn.Conv2d,则使用均值为0,
标准差为0.5的正态分布进行初始化权重weight;如果是全连接层,
则使用分布在(-0.1,0.1)之间的均匀分布进行初始化权重weight,
偏置bias使用0.01。
"""
"""在网络testNet中,对定义好的函数init_weights()使用apply方法即可,
testNet的初始化程序如下:
"""
torch.manual_seed(13)
testNet.apply(init_weights)
6.pytorch中定义网络的方式
在pytorch中提供了多种搭建网络的方法,下面以一个简单的全连接神经网络回归为例,介绍定义网络的过程,将会使用到Module和Sequential两种不同的网络定义方式。
import torch
import torch.nn as nn
from torch.optim import SGD
import torch.utils.data as Data #用于对数据的预处理
from sklearn.datasets import load_boston#用于导入数据
from sklearn.preprocessing import StandardScaler#用于对数据进行标准化
import pandas as pd
import matplotlib.pyplot as plt6.1 数据准备
下面以波士顿房价数据为例,分别使用Module和Sequential两种方式来定义一个简单的全连接神经网络,并用于网络模型的训练。在定义网络之前,先导入数据,并对数据进行预处理
#读取数据
boston_x,boston_y=load_boston(return_X_y=True)
"""
下面使用StandardScaler()对数据集中的自变量进行标准化处理
在标准化处理之后,需要将数据集转化为张量并设置一个数据加载器,方便模型的训练
"""
#数据标准化处理
ss=StandardScaler(with_mean=True,with_std=True)
boston_xs=ss.fit_transform(boston_x)
#将数据预处理为可以使用pytorch进行批量训练的形式
#训练集x转化为张量
train_x=torch.from_numpy(boston_xs.astype(np.float32))
#训练集y转化为张量
train_y=torch.from_numpy(boston_y.astype(np.float32))
#将训练集转化为张量之后,使用TensorDataset将x和y整合在一起
train_data=Data.TensorDataset(train_x,train_y)
#定义一个数据加载器,将训练数据集进行批量处理
train_loader=Data.DataLoader(
dataset=train_data,#使用的数据集
batch_size=128,#批处理样本大小
shuffle=True,#每次迭代前打乱数据
num_workers=1#使用两个进程
)
"""
上面的程序进行如下操作:
(1)使用StandardScaler()对数据集的自变量进行了标准化处理,
然后使用torch.from_numpy()函数将Numpy数组转化为张量。
(2)针对转化为张量数据的train_x和train_y使用Data.TensorDataset)函数
和Data.DataLoader()函数定义了一个数据加载器,方便使用随机梯度下降类算法优化,
每个batch包含128个样本
"""
6.2 网络定义与训练方式1
import torch
import torch.nn as nn
from torch.optim import SGD
import torch.utils.data as Data #用于对数据的预处理
from sklearn.datasets import load_boston#用于导入数据
from sklearn.preprocessing import StandardScaler#用于对数据进行标准化
import pandas as pd
import matplotlib.pyplot as plt
import numpy as np
#读取数据
boston_x,boston_y=load_boston(return_X_y=True)
#数据标准化处理
ss=StandardScaler(with_mean=True,with_std=True)
boston_xs=ss.fit_transform(boston_x)
#将数据预处理为可以使用pytorch进行批量训练的形式
train_x=torch.from_numpy(boston_xs.astype(np.float32))
train_y=torch.from_numpy(boston_y.astype(np.float32))
train_data=Data.TensorDataset(train_x,train_y)
#定义一个数据加载器,将训练数据集进行批量处理
train_loader=Data.DataLoader(
dataset=train_data,#使用的数据集
batch_size=128,#批处理样本大小
shuffle=True,#每次迭代前打乱数据
num_workers=0#使用两个进程
)
#第一种定义网络的方式
class myNet(nn.Module):
def __init__(self):
super(myNet,self).__init__()
#定义第一个隐藏层
self.hidden1=nn.Linear(
in_features=13,#第一个隐藏层的输入,数据的特征数
out_features=10,#第一个隐藏层的输出,神经元的数目
bias=True#默认会有偏置
)
self.active1=nn.ReLU()
#定义第二个隐藏层
self.hidden2=nn.Linear(10,10)
self.active2=nn.ReLU()
#定义预测回归层
self.regression=nn.Linear(10,1)
#定义网络的前向传播
def forward(self,x):
x=self.hidden1(x)
x=self.active1(x)
x=self.hidden2(x)
x=self.active2(x)
output=self.regression(x)
return output
"""
上面的程序定义了一个类myNet,在继承了nn.Module类的基础上对其功能进行了定义。
在我们定义的类确定的函数中,包含两个部分,一部分定义了网络结构,
另一部分定义了网络结构的向前传播过程forward()函数。
在程序中网络结构包含3个使用nn.Linear()定义的全连接层和2个使用nn.ReLU()定义的激活函数层。
在定义forward()函数中,通过对输入x进行一系列的层计算,获取最后的输出output
对于定义好的网络结构,可以使用myNet()函数类得到网络结构,使用程序如下:
"""
mynet=myNet()
print(mynet)
#定义好网络之后,可以对已经准备好的数据集进行训练
#对回归模型mynet进行训练并输出损失函数的变化情况,定义优化器和损失函数
optimizer=SGD(mynet.parameters(),lr=0.001)
loss_func=nn.MSELoss()#最小均方误差
train_loss_all=[]#输出每个批次训练的损失函数
#进行训练,并输出每次迭代的损失函数
for epoch in range(30):
# 对训练数据的加载器进行迭代计算
for step,(b_x,b_y) in enumerate(train_loader):
output=mynet(b_x).flatten()#mynet在训练batch上的输出
train_loss=loss_func(output,b_y)#均方根误差
optimizer.zero_grad()#每个迭代步的梯度初始化为0
train_loss.backward()#损失的后向传播,计算梯度
optimizer.step()#使用梯度进行优化
train_loss_all.append(train_loss.item())
"""
在上面的程序中,我们使用SGD(随机梯度下降)优化方法对网络进行了优化,
需要优化的参数可以使用mynet.parameters()获得。在SGD()函数中,lr参数指定了优化时的学习率。
针对回归问题可以使用nn.MSELoss()函数(最小均方根误差)作为损失函数。
代码中使用两层for循环对网络进行参数训练,第一层for循环定义了对整个数据集训练的次数——30次,
第二层for循环利用数据加载器train_loader中的每一个batch对模型参数进行优化。
在优化训练的过程中,把每个batch的损失函数保存在train_loss_all列表中。
"""
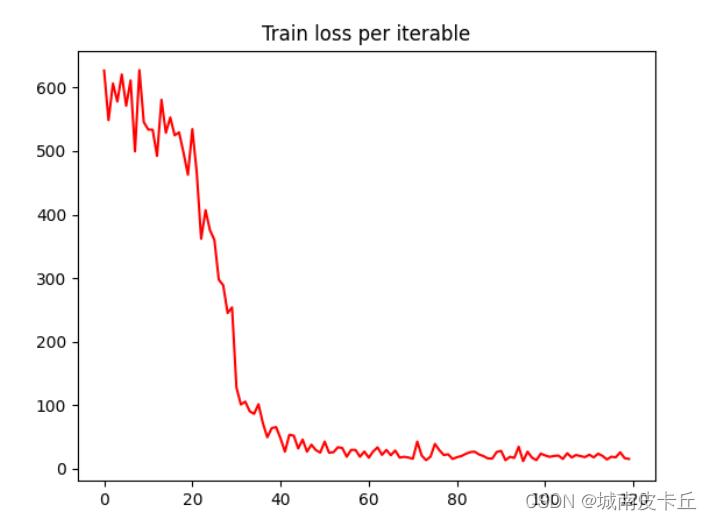
plt.figure()
plt.plot(train_loss_all,"r-")
plt.title("Train loss per iterable")
plt.show()在网络训练完毕后,将train_loss_all进行可视化,每个batch上损失函数值的变化情况如下图所示:
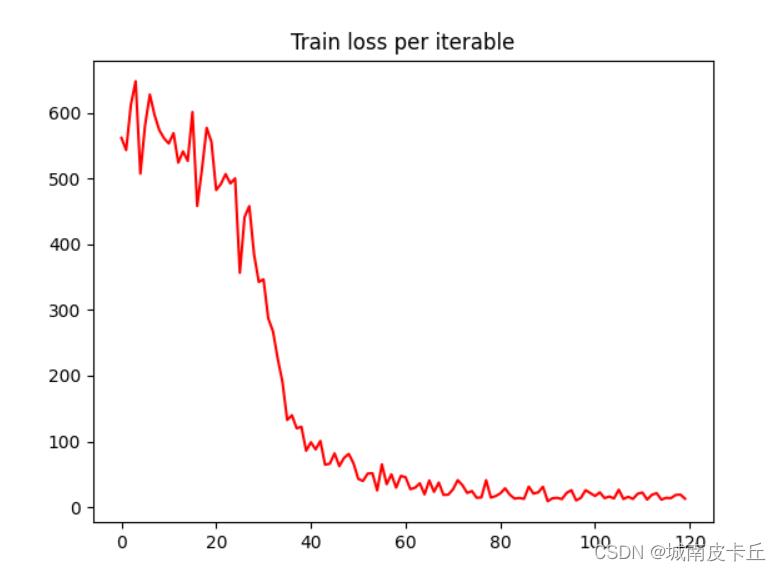
从上图可以发现损失函数的变化趋势是迅速下降,然后在一个小的范围内平稳波动。可以认为网络经过30个epoch,120次左右的迭代计算,损失函数大小达到了稳定。
6.3 网络定义与训练方式2
上上面的网络定义方式中,我们为每个层都指定了一个名称,在pytorch中提供了可以将多个功能层连接在一起的函数nn.Sequential(),大大方便了网络前向传播的定义。
import torch
import torch.nn as nn
from torch.optim import SGD
import torch.utils.data as Data
from sklearn.datasets import load_boston
from sklearn.preprocessing import StandardScaler
import pandas as pd
import matplotlib.pyplot as plt
import numpy as np
boston_x,boston_y=load_boston(return_X_y=True)
ss=StandardScaler(with_mean=True,with_std=True)
boston_xs=ss.fit_transform(boston_x)
train_x=torch.from_numpy(boston_xs.astype(np.float32))
train_y=torch.from_numpy(boston_y.astype(np.float32))
train_data=Data.TensorDataset(train_x,train_y)
train_loader=Data.DataLoader(
dataset=train_data,
batch_size=128,
shuffle=True,
num_workers=0
)
"""
使用nn.Sequential()定义网络
"""
class myNet2(nn.Module):
def __init__(self):
super(myNet2,self).__init__()
#定义隐藏层
self.hidden=nn.Sequential(
nn.Linear(13,10),
nn.ReLU(),
nn.Linear(10,10),
nn.ReLU()
)
#预测回归层
self.regression=nn.Linear(10,1)
#定义网络的前向传播算法
def forward(self,x):
x=self.hidden(x)
output=self.regression(x)
return output
mynet2=myNet2()
"""
由于nn.Sequential()函数的使用,上面的程序定义网络的结构和前向传播函数得到了简化,
网络中通过nn.Sequential()函数将两个nn.Linear()层和两个nn.ReLU()层统一打
包为self.hidden层,所以前向传播过程函数得到了简化
"""
#对回归模型mynet2进行训练并输出损失函数的变化情况,定义优化器和损失函数
optimizer=SGD(mynet2.parameters(),lr=0.001)
loss_func=nn.MSELoss()#最小均方根误差
train_loss_all=[]#输出每个批次训练的损失函数
#进行训练,并输出每次迭代的损失函数
for epoch in range(30):
for step,(b_x,b_y) in enumerate(train_loader):
output=mynet2(b_x).flatten()#mynet2在训练batch上的输出
train_loss=loss_func(output,b_y)#均方根误差
optimizer.zero_grad()#每个迭代步的初始化参数为0
train_loss.backward()#损失的后向传播,计算梯度
optimizer.step()#使用梯度进行优化
train_loss_all.append(train_loss.item())
# 对训练数据的加载器进行迭代计算
plt.figure()
plt.plot(train_loss_all,"r-")
plt.title("Train loss per iterable")
plt.show()
从下图中可以看出损失函数的变化趋势和mynet1相似,先是迅速下降,然后在一个小的范围内平稳波动。可以认为网络经过30个epoch和120次左右的迭代计算后,达到了稳定。
7. Pytorch模型保存和加载方法
对于已经训练好的模型,如何保存以及使用已经训练好的模型呢?
方式一:保存整个模型
#保存整个模型
torch.save(mynet2,"E:\\\\myModels\\\\mynet2.pkl")
#导入保存的模型
mynet2_load=torch.load("E:\\\\myModels\\\\mynet2.pkl")
"""
上面的程序是使用torch.save()函数将已经训练好的模型保存到指定文件夹下的mynet2.pkl文件。
在模型保存后,可以通过torch.load()函数,将指定的模型文件导入,
"""方式二:只保存模型的参数
torch.save(mynet2.state_dict(),"E:\\\\myModels\\\\mynet2_param.pkl")
mynet2_param_load=torch.load("E:\\\\myModels\\\\mynet2.pkl")
"""
上面的程序使用mynet2.state_dict()来获取mynet2网络中已经训练好的参数,
然后通过torch.save()将其保存。
同样可以使用torch.load()函数将保存好的参数导入
"""以上是关于-pytorch实现深度神经网络与训练的主要内容,如果未能解决你的问题,请参考以下文章
论文实现以SVD的分解形式进行深度神经网络的训练(PyTorch)
[深度学习][pytorch]pytorch实现一个简单得线性回归模型并训练