优化算法迭代扩展卡尔曼滤波算法(IEKF)含Matlab源码 1584期
Posted 紫极神光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了优化算法迭代扩展卡尔曼滤波算法(IEKF)含Matlab源码 1584期相关的知识,希望对你有一定的参考价值。
一、获取代码方式
获取代码方式1:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
获取代码方式2:
完整代码已上传我的资源:【优化算法】迭代扩展卡尔曼滤波算法(IEKF)【含Matlab源码 1584期】
备注:
订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、迭代扩展卡尔曼滤波算法(IEKF)简介
IEKF与EKF的不同之处主要在于测量更新过程,对于IEKF, 在得到状态预测

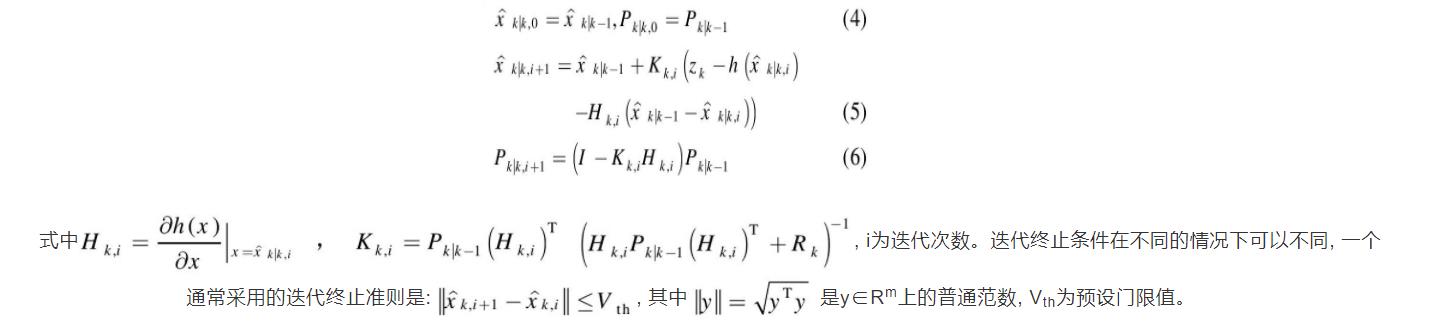
文献[8]证明了IEKF迭代结果与高斯牛顿方法估计的结果是一致的, 因此IEKF可以保证全局收敛。理论上, IEKF优于EKF和MVEKF, 然而, 实际中并不完全如此, 因为: (1) 文献[8]给出的结论是建立在必须满足局部线性化条件的假设之上, 也就是说, 状态估计必须足够接近于真实值, 这在很多应用中不是总能成立, 因为初始估计误差可能会很大。 (2) 高斯牛顿方法虽然能保证全局收敛, 但不能保证达到似然面[9]。另外, 预设门限Vth对迭代过程很关键, 要选择一个合适的值不容易。
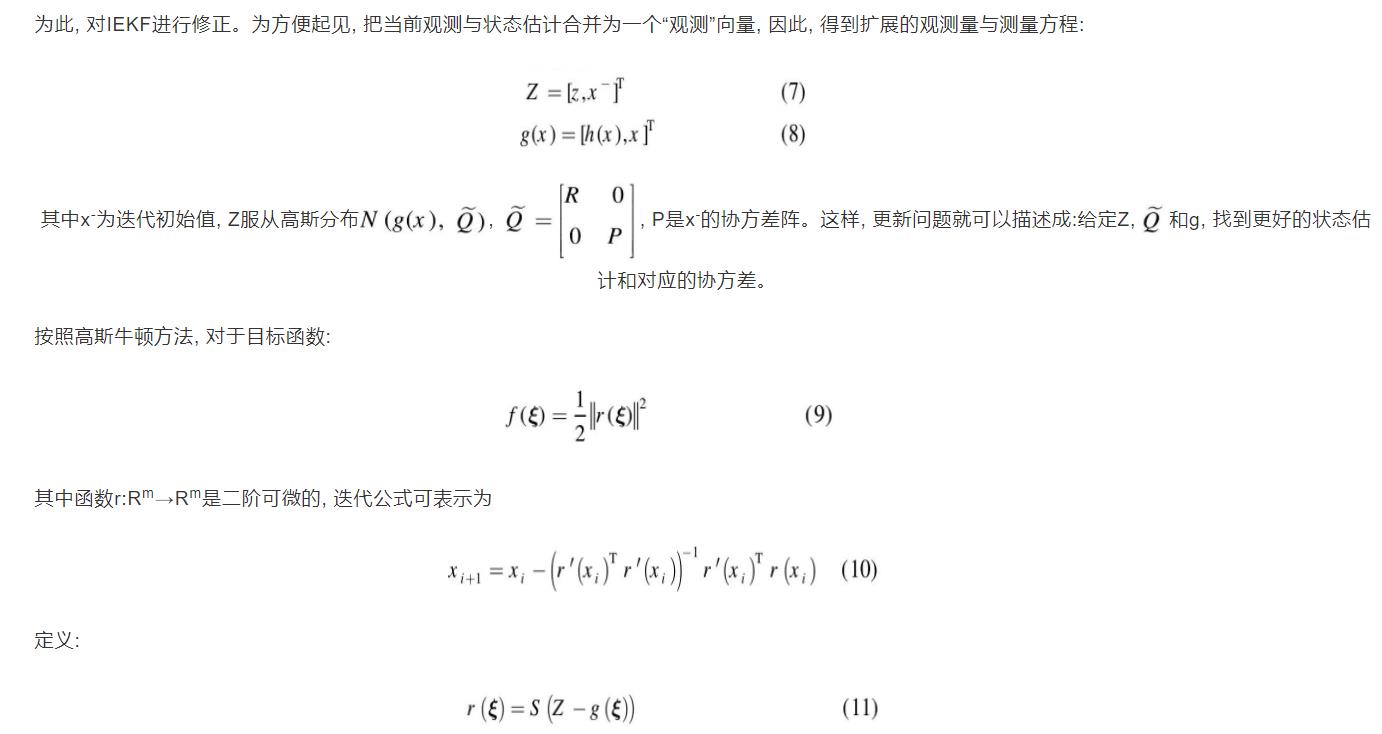
为此, 对IEKF进行修正。为方便起见, 把当前观测与状态估计合并为一个“观测”向量, 因此, 得到扩展的观测量与测量方程:


三、部分源代码
% function to implement the Iterated Extended Kalman Filter (IEKF)
% Inputs:
% OBSn - the observations (with noise)
% xest - initial state space estimates
% Ouputs:
% Xp - predicted states
function Xp = f_IEKF(OBSn,xest)
load avar % r1,r2, L, and T
tol = .1; % tolerance for iterations
diff = 1;
count = 0;
F = [1 T 0 0 0 0 0;
0 1 0 0 0 0 0;
0 0 1 T 0 0 0;
0 0 0 1 0 0 0;
0 0 0 0 1 0 T;
0 0 0 0 0 1 T;
0 0 0 0 0 0 1]; % state transition matrix
n = size(OBSn,2); % number of observations
Xp = zeros(7,n); % make room
Pkp1 = 1e10*eye(7); %xest*xest'; %.1*ones(7,7);
%Pkp1 = xest*xest';
%Pkp1 = F*Pkp1*F';
%Pkp1 = (10*randn(7,1))*(10*randn(7,1)).';
%Pkp1 = F*Pkp1*F';
% for each observation
for i = 1:n;
% if this is the first iteration the prior predicted estimate is xest
% if this is not the first run the prior estimate is in Xp
if i == 1
xkm1 = xest;
else
xkm1 = Xp(:,i-1);
end
Pkm1 = Pkp1; % conditional covariance from last iteration
% iterations are started with the predicted estimate from the last run
xkn = xkm1;
while ~(diff < tol || count > 9)
count = count + 1;
H = [gradest(@(x)f_h1(x),xkn); gradest(@(x)f_h2(x),xkn)];
R = (.01*randn(2,1))*(.01*randn(2,1)).';
Rdiag = diag(R); R = diag(Rdiag);
K = Pkm1*H'*(H*Pkm1*H'+R)^-1;
xkn_temp = xkm1 + K*(OBSn(:,i)-f_h(xkn)-H*(xkm1-xkn));
diff = norm(abs(xkn_temp-xkn));
fprintf('diff = %g \\n',diff)
xkn = xkn_temp;
end
H = [gradest(@(x)f_h1(x),xkn); gradest(@(x)f_h2(x),xkn)];
Pkk = (eye(7)-K*H)*Pkm1;
Pkp1 = F*Pkk*F';
Xp(:,i) = F*xkn;
clc;
fprintf('i = %g; Count is %g \\n',i,count)
count = 0;
diff = 1;
end
% Script to start playing around with this stuff
clc; clear all; close all
% x = [xc xcd zc zcd p1 p2 w].'
% simulation parameters
n = 100; % number of frames
xint = [-35 .7 35 .4 1 3 1].'; % initial state variable
xest = [-32 .9 32 .6 1.2 2.2 .7].'; % initial state estimates
noise = .01;
% simulate dynamics
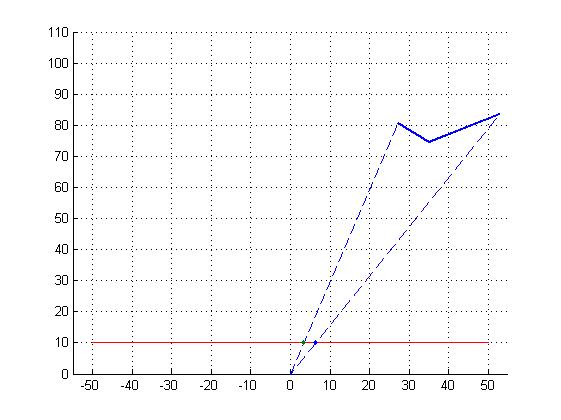
X = f_Simulate(xint,n);
% simulate observations
[OBS, OBSn] = f_Observe(X,noise);
% make movie
f_Movie(X,OBS,'SimMovie')
% run filter
Xp = f_IEKF(OBSn,xest);
% make movie
OBSr = f_Observe(Xp,0);
f_Movie(Xp,OBSr,'ResultsMovie')
save RunData
% pixel values
figure;
pos = get(gcf,'Position');
set(gcf,'Position',[pos(1)-100 pos(2)-200 1.5*pos(3) 1.5*pos(4)]);
plot(1:n,OBSn,'.-',1:n,OBSr,'.-'); grid on;
legend('X1 simulated','X2 simulated','X1 predicted','X2 predicted','Location','Best')
xlabel('Frame index (n)','FontName','Time','FontSize',15);
ylabel('Image pixel value','FontName','Time','FontSize',15);
title('Pixel observations with noise',...
'FontName','Time','FontSize',15,'FontWeight','Bold');
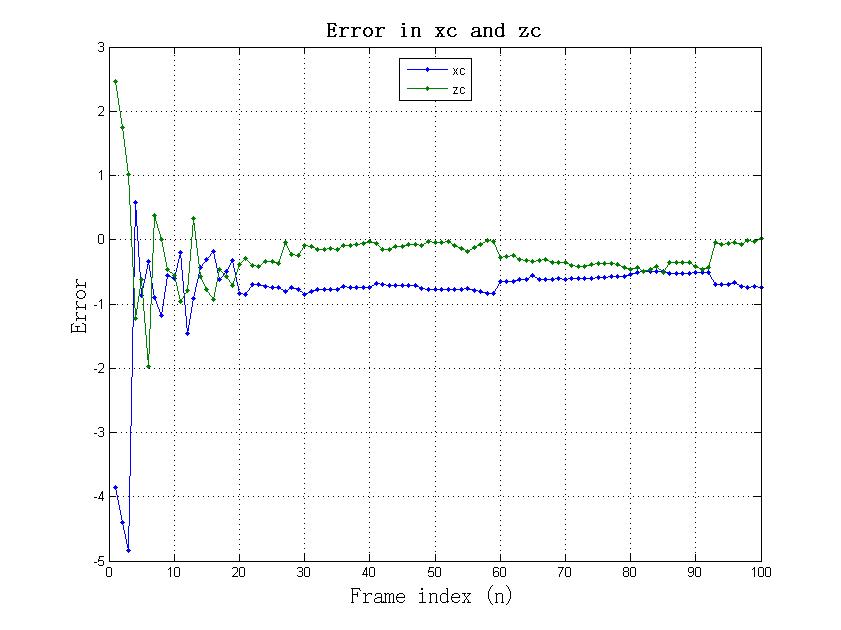
Error = X - Xp;
% error (xc and zc)
figure;
pos = get(gcf,'Position');
set(gcf,'Position',[pos(1)-100 pos(2)-200 1.5*pos(3) 1.5*pos(4)]);
plot(1:n,Error([1 3],:),'.-'); grid on;
legend('xc','zc','Location','Best')
xlabel('Frame index (n)','FontName','Time','FontSize',15);
ylabel('Error','FontName','Time','FontSize',15);
title('Error in xc and zc',...
'FontName','Time','FontSize',15,'FontWeight','Bold');
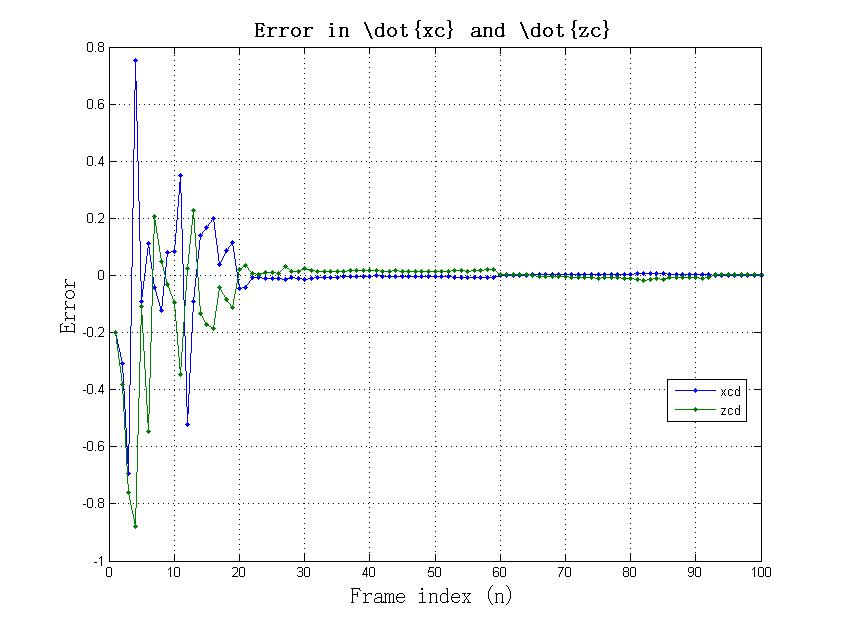
% error (xcd and zcd)
figure;
pos = get(gcf,'Position');
set(gcf,'Position',[pos(1)-100 pos(2)-200 1.5*pos(3) 1.5*pos(4)]);
plot(1:n,Error([2 4],:),'.-'); grid on;
legend('xcd','zcd','Location','Best')
xlabel('Frame index (n)','FontName','Time','FontSize',15);
ylabel('Error','FontName','Time','FontSize',15);
title('Error in \\dotxc and \\dotzc',...
'FontName','Time','FontSize',15,'FontWeight','Bold');
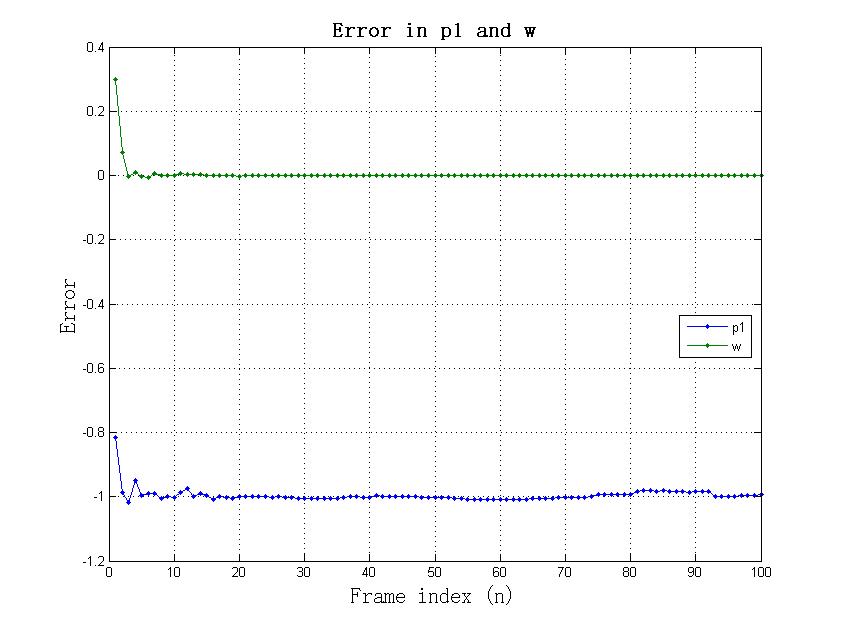
% error (p1 w)
figure;
pos = get(gcf,'Position');
set(gcf,'Position',[pos(1)-100 pos(2)-200 1.5*pos(3) 1.5*pos(4)]);
plot(1:n,Error([5 7],:),'.-'); grid on;
legend('p1','w','Location','Best')
xlabel('Frame index (n)','FontName','Time','FontSize',15);
ylabel('Error','FontName','Time','FontSize',15);
title('Error in p1 and w',...
'FontName','Time','FontSize',15,'FontWeight','Bold');
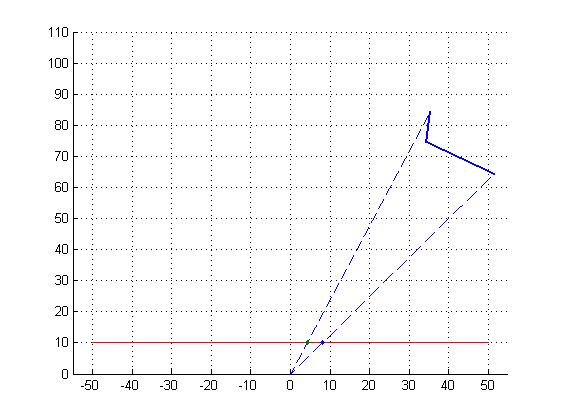
四、运行结果

五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
[3]张俊根,姬红兵.IMM迭代扩展卡尔曼粒子滤波跟踪算法[J].电子与信息学报. 2010,32(05)
以上是关于优化算法迭代扩展卡尔曼滤波算法(IEKF)含Matlab源码 1584期的主要内容,如果未能解决你的问题,请参考以下文章