GPS测量原理与应用_第四版_徐绍铨_武汉大学出版社_考试复习资料
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了GPS测量原理与应用_第四版_徐绍铨_武汉大学出版社_考试复习资料相关的知识,希望对你有一定的参考价值。
以下内容为本人本科期间整理,最终成绩 9 7 ′ 97^′ 97′,现分享出来,祝大家都能取得一个满意的成绩!
文章目录
名词解释
- 春分点: 当太阳在黄道上从天球南半球向北半球运行时,黄道与天球赤道的交点(从北向南的交点为秋分点) 。
- 真近点角: 卫星与近地点所对应地心夹角,是时间的函数。
- 升交点赤经: 升交点与春分点所对应的地心夹角称升交点赤经。
- 近地点角距: 在轨道平面上近地点与升交点所对应的地心夹角。
- 卫星无摄运动: 假设地球为匀质球体,其质量集中于球体的中心,这时由地球引力所决定的卫星运动,称为无摄运动。
- 卫星受摄运动: 考虑了摄动力作用的卫星运动成称为卫星的受摄运动。
- 卫星星历: 描述卫星运行轨道和状态的各种参数值,是计算卫星瞬时位置的依据,实质就是赋值后的轨道参数。
- 广播星历: 由接受导航电文获得的卫星星历,也称作预报星历。
- 精密星历: 是一些国家某些部门,根据各自建立的跟踪站所获得的精密观测资料计算的卫星星历, 又称后处理星历。
- 导航电文: 是利用GPS进行定位和导航的数据基础,包含卫星星历、时钟改正、电离层延迟改正、卫星工作状态信息以及由C/A码捕获P码信息等。
- 伪距: 由卫星发射的测距码信号到达GPS接收机的传播时间乘以光速所得到的站星距离。
- 伪距测量: 通过测定测距码得到站星距离的方法。
- 绝对定位: 又称单点定位,确定待定点在WGS-84坐标系中的绝对位置。
- 相对定位: 定位时,采用2台或2台以上接收机,同步观测相同的GPS卫星,确定接收机天线之间的相对位置。
- 静态定位: 接收机天线处于静止状态下,确定观测站坐标的方法称为静态绝对定位。
- 动态定位: 接收机天线处于运动状态下,确定观测站坐标的方法称为静态绝对定位。
- 整周跳变: 如果在跟踪卫星过程中,由于某种原因,如信号被阻挡暂时中断,或受无线电信号干扰造成失锁。这样,计数器计数不连续。因此,当信号重新被跟踪后,整周计数就不正确,但不到一个整周的相位观测值仍是正确的。这种现象称为周跳。
- 基线: 两测量点之间的连线,在此2点上同步接收相同的GPS卫星信号,并采集其观测数据。
- 观测时段: 测站上开始接收卫星信号到观测停止,连续工作的时间段。
- 同步观测: 两台或两台以上接收机同时对同一组卫星进行的观测。
- 同步观测环: 三台或三台以上接收机同步观测获得的基线向量构成的闭合环,简称同步环。
- 异步观测环: 在构成多边形环路的所有基线向量中,只要有非同步观测基线向量,则该多边形环路叫异步观测环,简称异步环。
- 独立观测环: 由独立观测(非同步观测)获得的基线向量构成的闭合环。
- 相对论效应: 由于卫星钟和接收机钟所处的状态(运动速度和重力位)不同而引起的卫星钟和接收机钟之间产生相对钟误差的现象。
- 多路径误差: 由于多路径的信号传播所引起的干涉时延效应被称作多路径效应。
- 子午卫星导航系统: GPS前身
第一章 绪论
1、四大全球卫星导航系统
中国的BDS(北斗),美国的GPS,俄罗斯的GLONASS(格洛纳斯),欧洲的Galileo(伽利略)
2、GPS基本参数 P2
卫星颗数21+3(都是MEO<中高轨道卫星>,3颗是备用卫星),6个轨道面,卫星高度20200Km,轨道倾角55°,运行周期11 h 58 min
3、BDS基本参数
卫星颗数5(地球静止轨道-GEO)+27(中高轨道卫星-MEO)+3(倾斜轨道卫星-IGSO,8字形) 3轨道
4、四大系统参数表 P12
5、GPS系统三大部分 P13
空间部分——GPS卫星星座;地面控制部分——地面监控系统;用户设备部分——GPS信号接收机
6、GPS系统各部分的作用
- GPS卫星的作用:P13
1)向用户发送导航定位信号;
2)接收由地面注入站发送到卫星的导航电文和其他有关信息;
3)接收主控站的调度命令,改正运行偏差或启用备用钟等。 - 地面监控系统组成及作用:P14
组成:包括1个主控站,3个注入站,5个监测站
主控站的作用:收集数据,处理数据,编制导航电文,监测调度,控制卫星;
注入站的作用:将主控站发来的导航电文注入到相应卫星的存储器
监测站的作用:为主控站提供卫星的观测数据。 - GPS信号接收机的作用:捕捉卫星信号,达到定位和导航的目的。
7、GPS系统的特点
1)定位精度高;2)观测时间短;3)测站间无需通视;4)可提供三维坐标;5)操作简便;6)全天候作业;7)功能多,应用广。
8、卫星信号→监测站→主控站产生导航电文→注入站→卫星
第二章 坐标系统和时间系统
1、根据坐标轴指向的不同分为两类坐标系
- 天球坐标系
天球坐标系与地球自转无关,便于描述人造地球卫星的位置。 - 地球坐标系
地球坐标系随同地球自转,可看作固定在地球上的坐标系,便于描述地面观测站的空间位置;
2、春分点: 当太阳在黄道上从天球南半球向北半球运行时,黄道与天球赤道的交点(从北向南的交点为秋分点)。
3、岁差: 回归年与恒星年的时间差。(长期) 章动:月球引力导致地球在公转轨道上左右摆动。(短期)
4、极移: 地球瞬时自转轴在地球上随时间而变。
5、GPS单点定位的坐标以及相对定位中解算的基线向量属于WGS-84大地坐标系。
- WGS-84大地坐标系(三维)的几何定义是:原点位于地球质心,Z轴指向BIH1984.0定义的协议地球极(CTP)方向,X轴指向BIH1984.0的零子午面和CTP赤道的交点,Y轴与Z、X轴构成右手坐标系。
- 1954年北京坐标系:采用克拉索夫斯基椭球元素,原点在普尔科沃;
- 1980国家大地坐标系,原点在陕西省泾阳县永乐镇。
6、时间系统与坐标系统一样,应有其尺度(时间单位)与原点(历元)。只有把尺度与原点结合起来,才能给出时刻的概念
7、卫星测量常用坐标系
- 瞬时极天球坐标系
- 瞬时极地球坐标系
- 固定极天球坐标系(平天球坐标系)
- 固定极地球坐标系(平地球坐标系)
8、坐标系按原点不同分为:
- 参心坐标系(以参考椭球中心为原点):1954年北京坐标系,1980年国家大地坐标系
- 质心坐标系(以地球质心为原点):WGS-84坐标系(GPS用),CGCS2000坐标系(北斗用),PZ-90坐标系(GLONASS用)
❀ 高斯平面直角坐标系是二维(x,y)平面坐标系,其他坐标系均为三维
❀ 两个二维坐标系转换,有4个参数,至少需要两个点(列4个方程)
❀ 两个三维坐标系转换,布尔莎七参数,至少需要3个起算点(可列9个方程)
第三章 卫星运动基础及GPS卫星星历
1、GPS卫星运动所受的摄动力有哪些? P39
地球引力、日月引力、大气阻力、太阳光压、地球潮汐力等。地球引力是主要的。
❀ 二体问题: 仅考虑地球质心引力研究卫星相对于地球的运动 P39
2、考虑了摄动力作用的卫星运动为卫星的受摄运动。 只考虑地球质心引力作用的卫星运动称为卫星的无摄运动。P39
3、无摄运动(即卫星理想状态)遵循开普勒三大天体运行规律:
1)卫星运动的轨道是一个椭圆,地球位于其一个焦点上
2)卫星地心向径r在相同的时间内所扫过的面积相等
3)卫星运动周期T的平方与轨道长半轴a的三次方之比为一常量,即K=T²/a³
4、开普勒轨道6参数是什么?各参数的作用? P40
①椭圆长半轴a及其偏心率e:确定轨道椭圆的形状和大小;
②真近角点V:确定卫星在轨道上的瞬时位置;
③升交点的赤径Ω以及轨道面倾角i:唯一确定卫星轨道平面与地球体之间的相对定向;
④近地点角距ω:表达了开普勒椭圆在轨道平面上的定向。
5、什么是GPS卫星星历 ?分类? P47
卫星星历是描述卫星运动轨道的信息,分为预报星历(也叫广播星历)和后处理星历(也叫精密星历)
❀广播星历和后处理星历的区别
广播星历:实时性,精度较低
后处理星历:不具实时性,精度高
❀GPS广播星历参数共有17个,其中2个参考时刻,6个对应参考时刻的开普勒轨道参数和9个反映摄动力影响的参数。
6、名词解释
- 真近点角
- 升交点赤经
- 近地点角距
- 卫星的无摄运动:只考虑地球质心引力作用的卫星运动称为卫星的无摄运动
- 卫星的受摄运动:考虑了摄动力作用的卫星运动为卫星的受摄运动
- 卫星星历:卫星星历是描述卫星运动轨道的信息
- 广播星历:由接受导航电文获得的卫星星历,也称作预报星历。
- 后处理星历:是一些国家某些部门,根据各自建立的跟踪站所获得的精密观测资料计算的卫星星历, 又称后处理星历。
第四章 GPS卫星信号和导航电文
1、GPS卫星信号的内容及其作用 P51
- 内容:载波、测距码(又称P码(精码)和C/A码(粗码))和数据码(又导航电文或D码)
- 作用:
载波:加载和传送码信号,其本身也是重要的测量对象。
测距码:测定站星距离。
数据码:确定卫星的瞬时位置。
❀时钟基本频率为f0=10.23MHz。
L1载波:fL1=154f0=1575.42MHz,波长λ1=19.032cm;
L2载波:fL2=120f0=1227.6MHz,波长λ2=24.42cm; λf=c(3108m/s)
新增L5载波:fL5=115f0=1176.45MHz,波长λ5=25.48cm。
补:选择L1、L2载波,目的在于测量出或消除电离层延迟误差。
❀λ越小,测距精度越高
2、简述C/A码和P码各自特点?
- C/A码码长很短,码元宽度较大,易于捕获。
- P码码长较长,码元宽度较小,不易捕获。
3、GPS接收机由哪几个单元组成的?(P69)
GPS接收机一般由天线单元、接收单元(主机)和电源组成。
4、名词解释
- 调制信号:在无线电通信技术中,为了有效地传播信息,都是将频率较低的信号加载在频率较高的载波上,此过程称为调制。(去掉调制信号的过程称为解调) P51
- 载波:加载和传送码信号,其本身也是重要的测量对象。
- 导航电文:是用户用户用来定位和导航的数据基础
5、m序列的特性
①均衡性②游程分布③移位相加特性④自相关
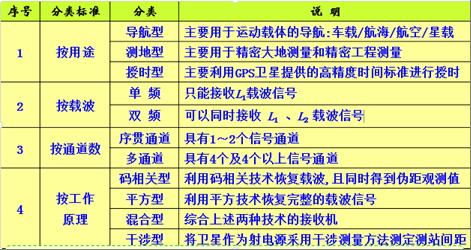
6、接收机分类:
7、导航电文的基本构成,其内容有哪些
导航电文是用户用户用来定位和导航的数据基础,他主要包括卫星星历、时钟改正、电离层时延改正、工作状态信息以及C/A码转换到捕获P码的信息。
8、伪随机噪声码又叫伪随机码或伪噪声码,简称PRN,是一个具有一定周期的取值为0和1的离散符号串。
第五章 GPS卫星定位基本原理
1、试述GPS测距和单点定位原理?写出方程式。
-
GPS测距基本原理:
测得卫星信号到达接收机的时间差( Δ t Δt Δt),求出站星之间的距离 ρ ’ = c ⋅ △ t ρ’=c·△t ρ’=c⋅△t (式中,c为电磁波传播速度)则
ρ = c ⋅ △ t + c ( V t i − V T ) ρ=c·△t+c(V_ti-V_T) ρ=c⋅△t+c(Vti−VT)
V t i V_ti Vti:卫星钟差,随导航电文得到。
V T V_T VT:接收机钟改正数,作为未知变量,定位时一并求解。 -
单点定位原理:将卫星的瞬时空间位置作为已知点,采用空间后方距离交会,得到待定点的空间位置。 ρ i 2 = ( X P − X i ) 2 + ( Y P − Y i ) 2 + ( Z P − Z i ) 2 , i = 1 , 2 , 3 , 4 ρi^2=(X_P-X_i)^2+(Y_P-Y_i)^2+(Z_P-Z_i)^2,i=1,2,3,4 ρi2=(XP−Xi)2+(YP−Yi)2+(ZP−Zi)2,i=1,2,3,4, 即
ρ 1 2 = ( X P − X 1 ) 2 + ( Y P − Y 1 ) 2 + ( Z P − Z 1 ) 2 ρ_1^2=(X_P-X_1)^2+(Y_P-Y_1)^2+(Z_P-Z_1)^2 ρ12=(XP−X1)2+(YP−Y1)2+(ZP−Z1)2
ρ 2 2 = ( X P − X 2 ) 2 + ( Y P − Y 2 ) 2 + ( Z P − Z 2 ) 2 ρ_2^2=(X_P-X_2)^2 +(Y_P-Y_2)^2+(Z_P-Z_2)^2 ρ22=(XP−X2)2+(YP−Y2)2+(ZP−Z2)2
ρ 3 2 = ( X P − X 3 ) 2 + ( Y P − Y 3 ) 2 + ( Z P − Z 3 ) 2 ρ_3^2=(X_P-X_3)^2+(Y_P-Y_3)^2+(Z_P-Z_3)^2 ρ32=(XP−X3)2+(YP−Y3)2+(ZP−Z3)2
ρ 4 2 = ( X P − X 4 ) 2 + ( Y P − Y 4 ) 2 + ( Z P − Z 4 ) 2 ρ_4^2=(X_P-X_4)^2+(Y_P-Y_4)^2+(Z_P-Z_4)^2 ρ42=<以上是关于GPS测量原理与应用_第四版_徐绍铨_武汉大学出版社_考试复习资料的主要内容,如果未能解决你的问题,请参考以下文章