基于CarMaker的C-NCAP主动安全系统试验仿真
Posted 橙子CK
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于CarMaker的C-NCAP主动安全系统试验仿真相关的知识,希望对你有一定的参考价值。
C-NCAP简介:C-NCAP是为了促进中国汽车产业的健康发展,加速国内汽车市场的全球化进程,中国汽车技术研究中心于2006年3月2日正式发布的首版中国新车评价规程(C-NCAP)。C-NCAP以更严格、更全面的要求,对车辆进行全方位安全性能测试,包括乘员保护、行人保护、主动安全等,从而给予消费者更加系统、客观的车辆安全信息,促进汽车企业不断提升整车安全性能。来源:百度百科
其中主动安全试验包括如下:
- 车辆追尾自动紧急制动系统(AEB CCR)
- 行人自动紧急制动系统(AEB VRU_Ped)
- 二轮车自动紧急制动系统(AEB VRU_TW)
- 车道保持系统(LKA)
- 可选审核项目LDW、SAS、BSD C2C、BSD C2TW 测试场景及评价方法
本文对车辆追尾自动紧急制动系统(AEB CCR)做详细介绍,并采用仿真试验方法搭建相应场景。
第一部分:静态场景分析
依据2021版C-NCAP管理规则,AEB CCR依据测试场景分为CCRs(前车静止)、CCRm(前车慢行),每种测试场景依据测试类型又分为AEB、FCW的测试,测试列表如下:
| 试验场景 | 试验类型 | 试验速度(km/h) | 偏置率 |
|---|---|---|---|
| CCRs(前车静止) | AEB | 20 | -50% |
| 20 | 100% | ||
| 30 | +50% | ||
| 30 | 100% | ||
| 40 | -50% | ||
| 40 | 100% | ||
| FCW | 50 | +50% | |
| 50 | 100% | ||
| 60 | -50% | ||
| 60 | 100% | ||
| 70 | +50% | ||
| 70 | 100% | ||
| 80 | -50% | ||
| 80 | 100% | ||
| CCRm(前车慢行) | AEB | 30 | +50% |
| 30 | 100% | ||
| 40 | -50% | ||
| 40 | 100% | ||
| 50 | +50% | ||
| 50 | 100% | ||
| FCW | 60 | -50% | |
| 60 | 100% | ||
| 70 | +50% | ||
| 70 | 100% | ||
| 80 | -50% | ||
| 80 | 100% |
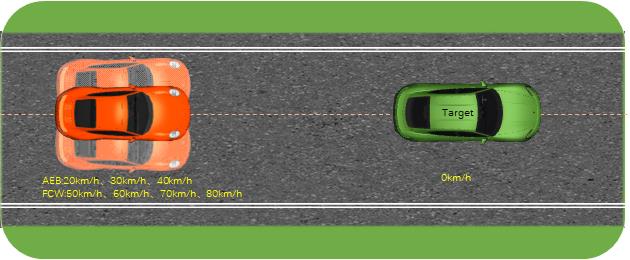
1.CCRs场景描述:
将目标车辆静置speed = 0km/h在Ego(本车车辆)行驶路径上,Ego按照规划路径行驶,行驶速度20km/h、30km/h、40km/h测试AEB功能,以50km/h、60km/h、70km/h、80km/h测试FCW功能,如下图:
2.CCRm场景描述:
设置目标车辆速度 speed= 20km/h并在Ego(本车车辆)行驶路径上匀速行驶,Ego按照规划路径行驶,行驶速度30km/h、40km/h、50km/h测试AEB功能,以60km/h、70km/h、80km/h测试FCW功能,如下图:

第二部分:动态场景搭建及运行仿真
在分析完所需搭建的场景后,我们开始在Carmaker中搭建我们需要的仿真场景, Carmaker 首先是一个优秀的动力学仿真软件, 提供了精准的车辆本体模型(发动机、 底盘、 悬架、 传动、 转向等) , 除此之外, Carmaker 还打造了包括车辆, 驾驶员, 道路, 交通环境的闭环仿真系统,关于CarMaker相关工具的介绍,大家可以查阅官网具体了解,地址:CarMaker | IPG Automotive
本次场景搭建,依据偏置率-50%、100%、50%分类搭建
搭建场景的基本思路:
1.选择何种车辆进行测试,
2.选择何种环境进行测试,
3.测试车辆以什么样行为达到测试目标,
4.目标车辆以什么样行为达到测试目标
下面我们以一个测试场景的搭建为示例:
第一步:我们打开Carmaker软件,在选择测试车辆并配置后界面如下:
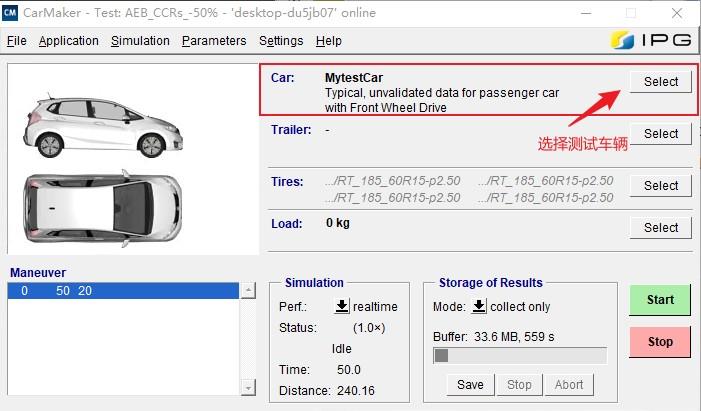
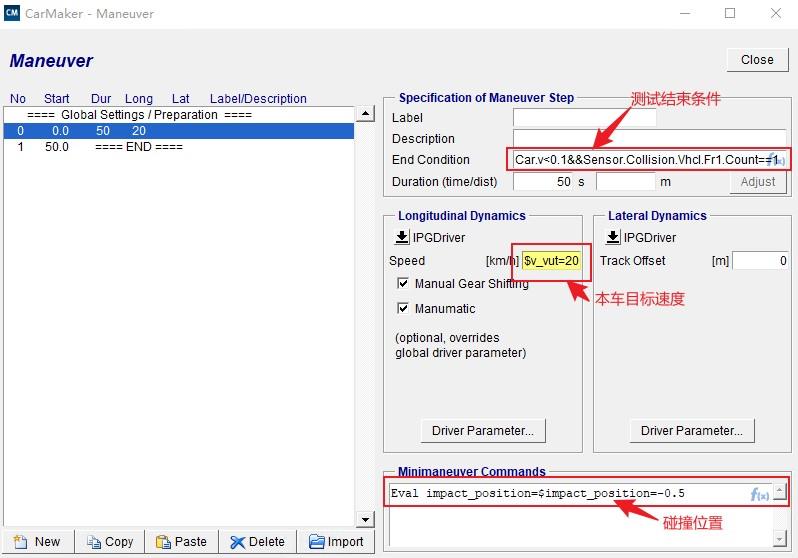
第二步:本次测试选择Fit作为演示测试车辆,通过点击左下角空白,打开Maneuver配置界面,如下图:
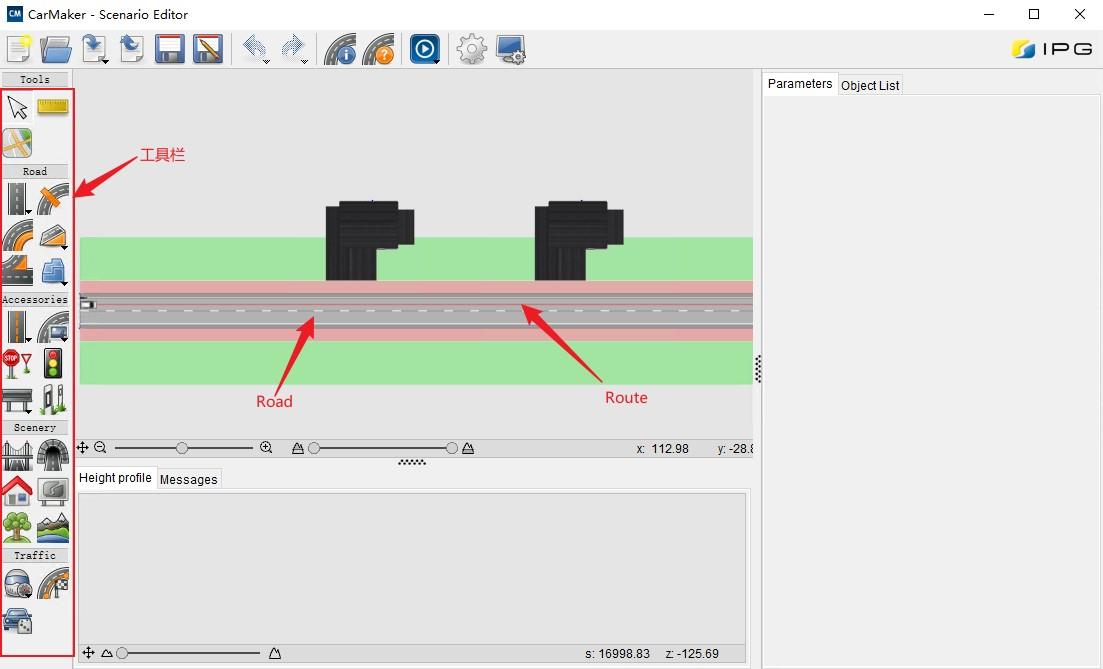
第三步:点击CarMaker GUI菜单栏中Parameters→Scenario/Road,打开Scenario Editor,开始编辑道路
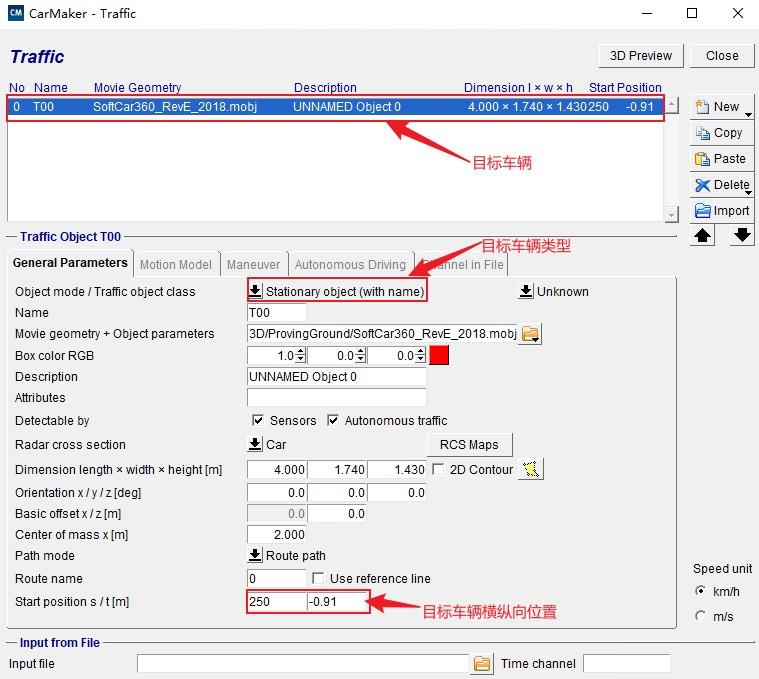
第四步:打开CarMaker GUI菜单栏中Parameters→Traffic,进行对目标车辆设置
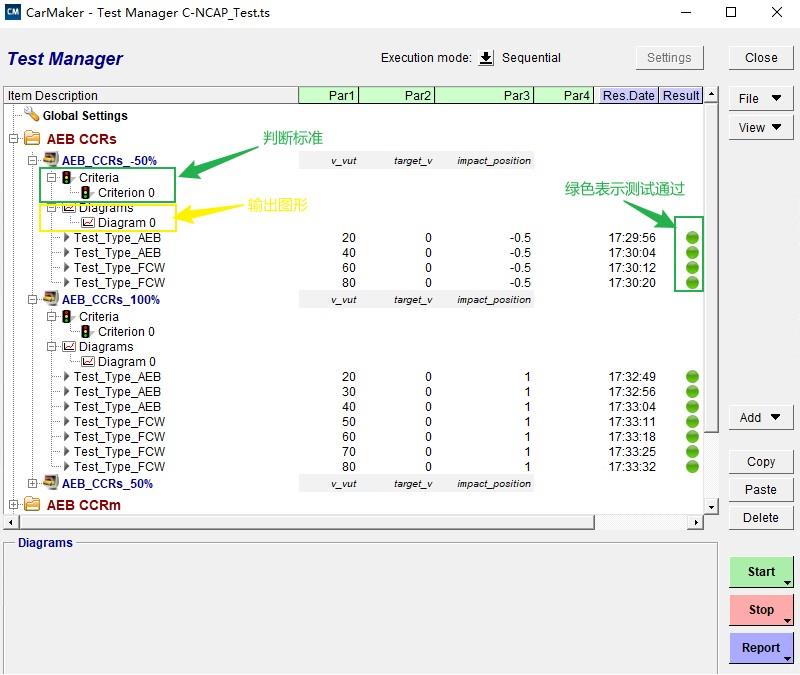
第五步:通过以上流程搭建完所需测试Case之后,我们将其添加至Test Manager实现自动化测试
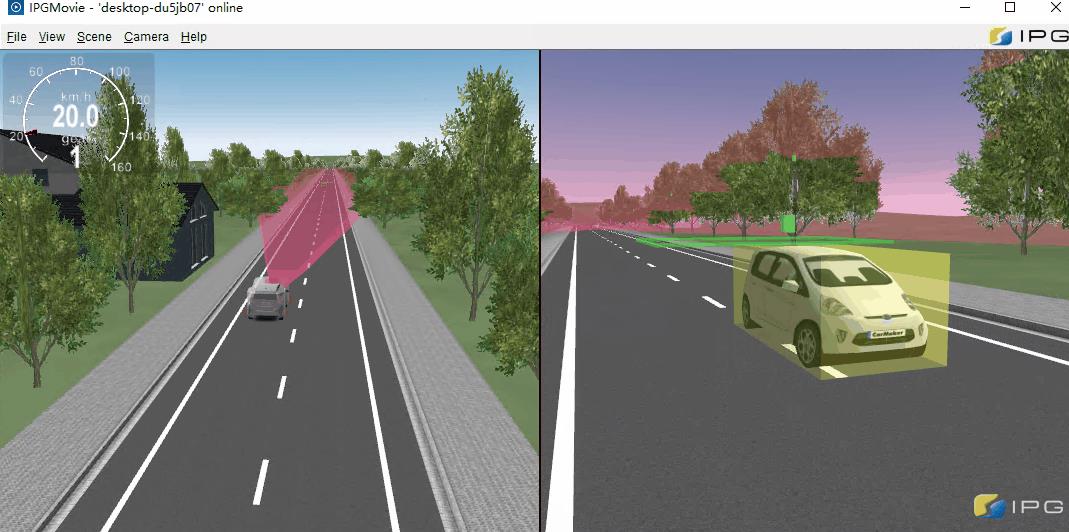
第六步:点击主界面GUI→Start 进行单个testRun运行并调试,也可点击Test manager界面Start进行自动运行所有Case ,运行示例如下:
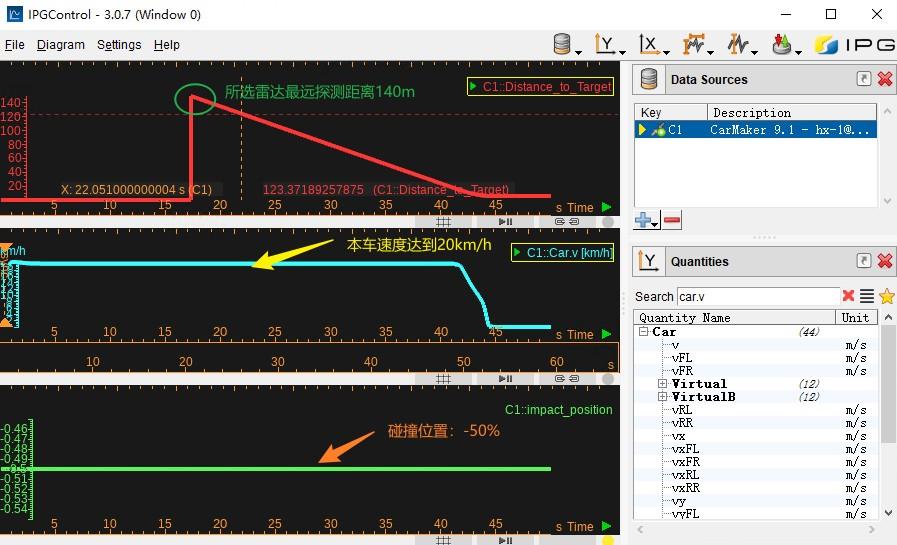
第七步:使用IPGControl对结果数据分析
第八步:最后通过Testmanager 生成仿真测试报告,当然可以通过脚本丰富报告内容。
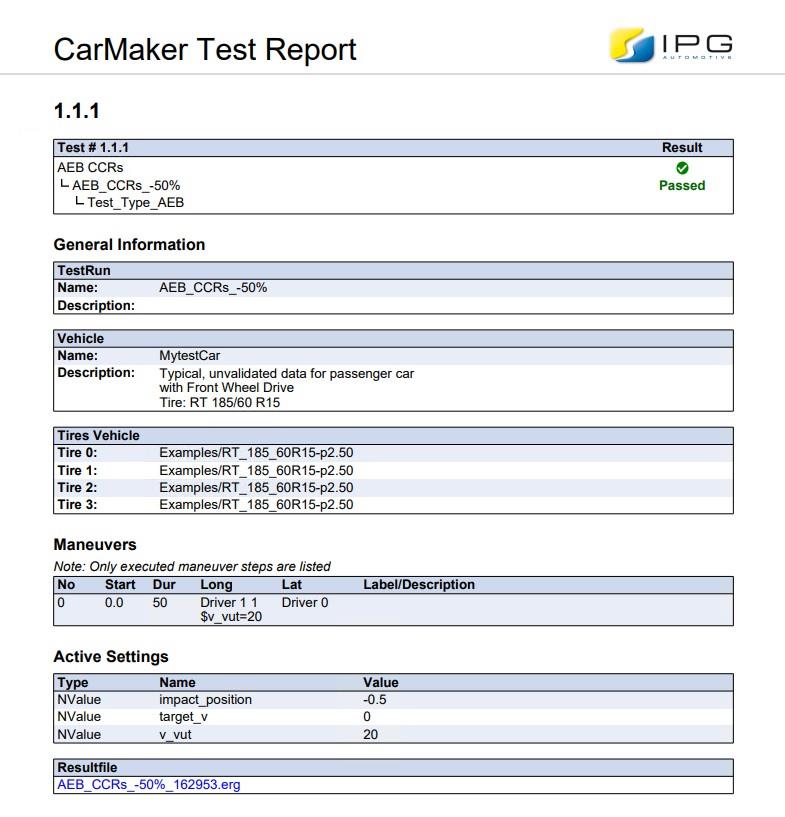
通过以上内容,展示了Carmaker搭建C-NCAP主动安全的基本流程,后续将通过继续更新C-NCAP其它场景的搭建,介绍Carmaker的更多应用。
以上是关于基于CarMaker的C-NCAP主动安全系统试验仿真的主要内容,如果未能解决你的问题,请参考以下文章