ROS实验笔记之——基于dv-gui多次标定event与imu的实验记录
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——基于dv-gui多次标定event与imu的实验记录相关的知识,希望对你有一定的参考价值。
之前博客《ROS实验笔记之——基于dv-gui的camera与IMU校正(DAVIS346与DVXplorer)》已经实现了event与imu的标定,但是几次标定下来发现误差还挺大的。。。。本来打算用dvs render获取图像,然后用原始版本的kalibr来标定,但是却发现无法检测特征点。
对于imu的噪声,选用默认值与之前的标定值各标定三次看看
DAVIS346
默认噪声第一次
accelerometer noise density0.002
acceletometer random walk4.0e-5
gyroscope noise density0.00018
gyroscope random walk0.001
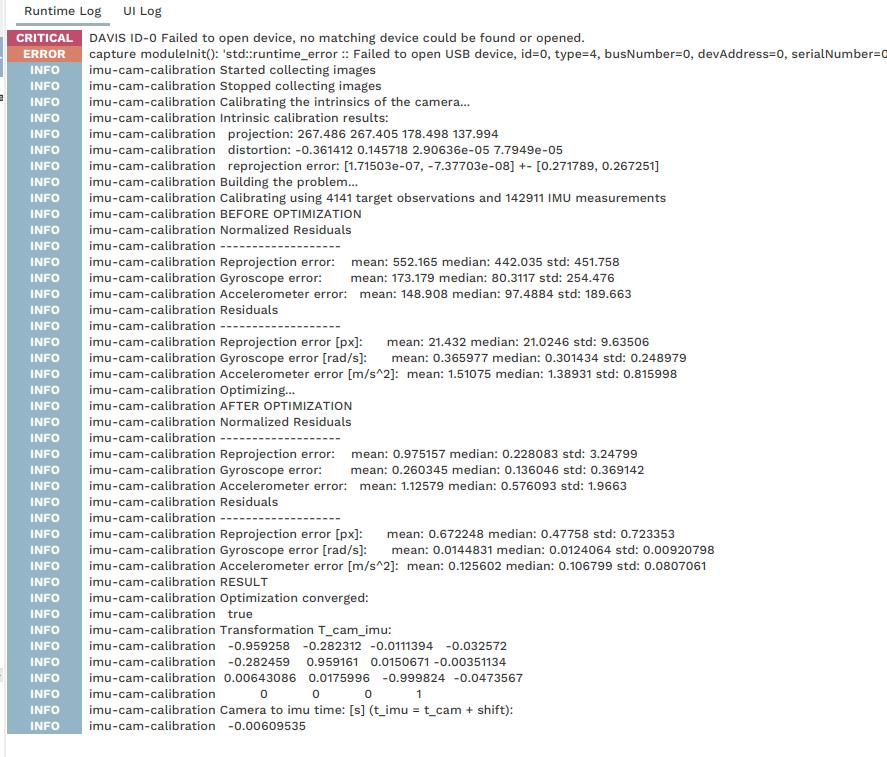
imu-cam-calibration projection: 267.486 267.405 178.498 137.994
imu-cam-calibration distortion: -0.361412 0.145718 2.90636e-05 7.7949e-05
imu-cam-calibration Calibrating using 4141 target observations and 142911 IMU measurements
imu-cam-calibration Transformation T_cam_imu:
imu-cam-calibration -0.959258 -0.282312 -0.0111394 -0.032572
imu-cam-calibration -0.282459 0.959161 0.0150671 -0.00351134
imu-cam-calibration 0.00643086 0.0175996 -0.999824 -0.0473567
imu-cam-calibration 0 0 0 1
imu-cam-calibration Camera to imu time: [s] (t_imu = t_cam + shift):
imu-cam-calibration -0.00609535
默认噪声第二次
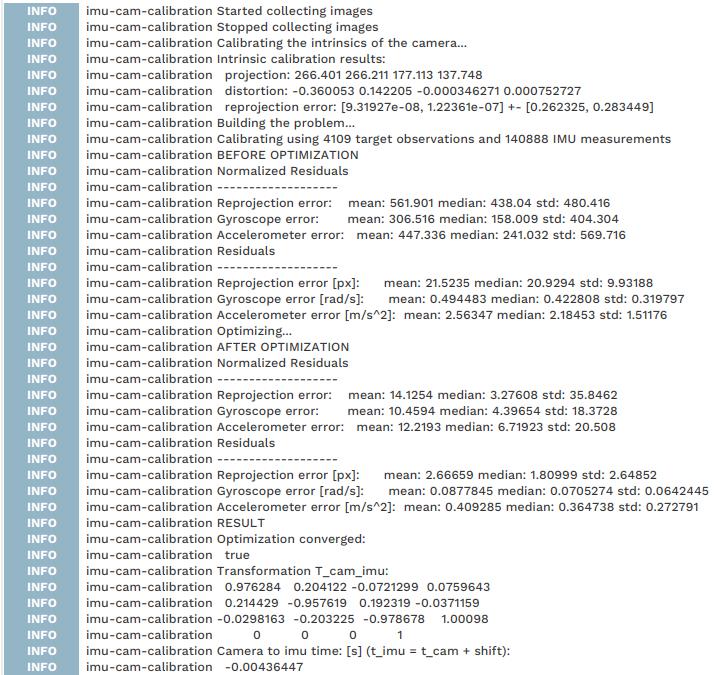
imu-cam-calibration projection: 266.401 266.211 177.113 137.748
imu-cam-calibration distortion: -0.360053 0.142205 -0.000346271 0.000752727
imu-cam-calibration Calibrating using 4109 target observations and 140888 IMU measurements
imu-cam-calibration Transformation T_cam_imu:
imu-cam-calibration 0.976284 0.204122 -0.0721299 0.0759643
imu-cam-calibration 0.214429 -0.957619 0.192319 -0.0371159
imu-cam-calibration -0.0298163 -0.203225 -0.978678 1.00098
imu-cam-calibration 0 0 0 1
imu-cam-calibration Camera to imu time: [s] (t_imu = t_cam + shift):
imu-cam-calibration -0.00436447
默认噪声第三次
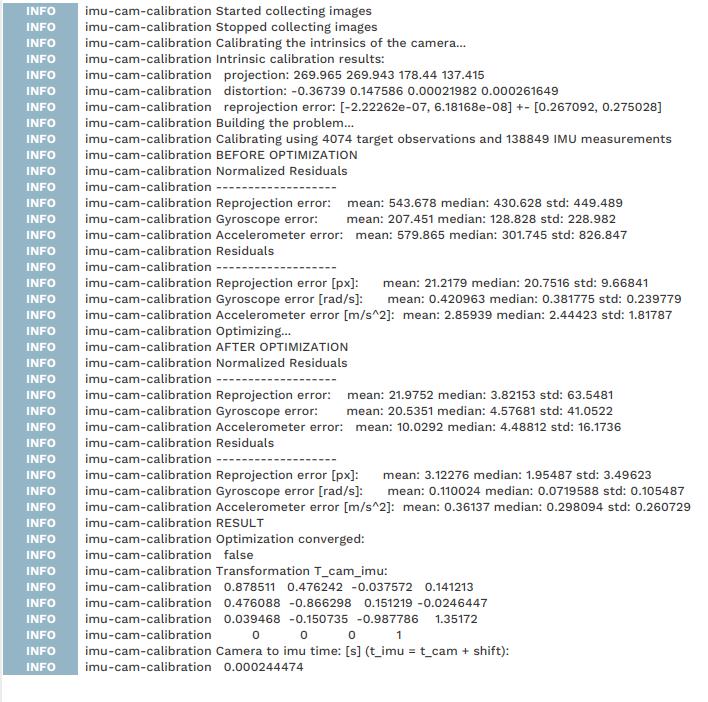
imu-cam-calibration projection: 269.965 269.943 178.44 137.415
imu-cam-calibration distortion: -0.36739 0.147586 0.00021982 0.000261649
imu-cam-calibration Calibrating using 4074 target observations and 138849 IMU measurements
imu-cam-calibration Transformation T_cam_imu:
imu-cam-calibration 0.878511 0.476242 -0.037572 0.141213
imu-cam-calibration 0.476088 -0.866298 0.151219 -0.0246447
imu-cam-calibration 0.039468 -0.150735 -0.987786 1.35172
imu-cam-calibration 0 0 0 1
imu-cam-calibration Camera to imu time: [s] (t_imu = t_cam + shift):
imu-cam-calibration 0.000244474
标定噪声第一次
gyr_n: 3.4869979619824697e-03
gyr_w: 4.4740603706140853e-05
acc_n: 4.2153479580575477e-02
acc_w: 8.5654389798364998e-04
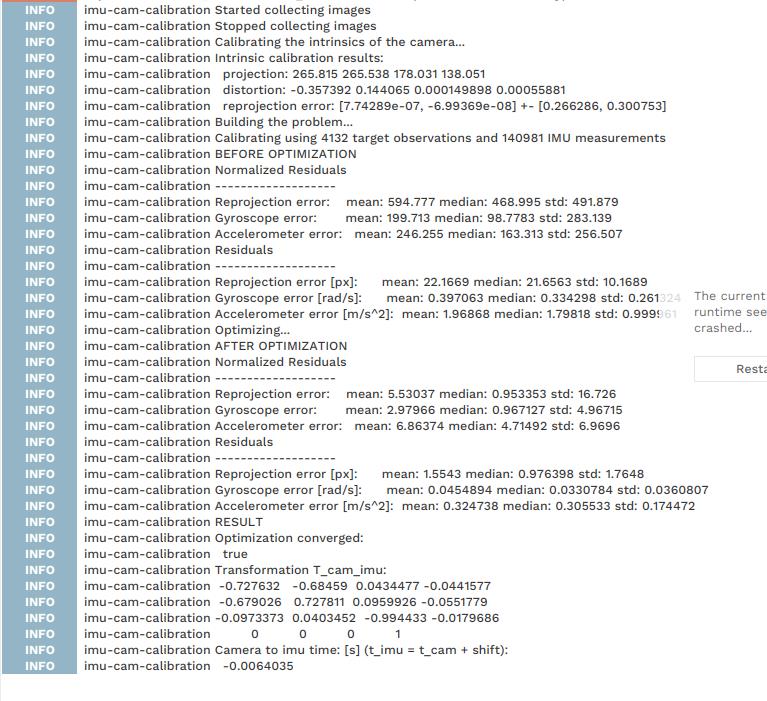
imu-cam-calibration projection: 265.815 265.538 178.031 138.051
imu-cam-calibration distortion: -0.357392 0.144065 0.000149898 0.00055881
imu-cam-calibration Calibrating using 4132 target observations and 140981 IMU measurements
imu-cam-calibration Transformation T_cam_imu:
imu-cam-calibration -0.727632 -0.68459 0.0434477 -0.0441577
imu-cam-calibration -0.679026 0.727811 0.0959926 -0.0551779
imu-cam-calibration -0.0973373 0.0403452 -0.994433 -0.0179686
imu-cam-calibration 0 0 0 1
imu-cam-calibration Camera to imu time: [s] (t_imu = t_cam + shift):
imu-cam-calibration -0.0064035
标定噪声第二次
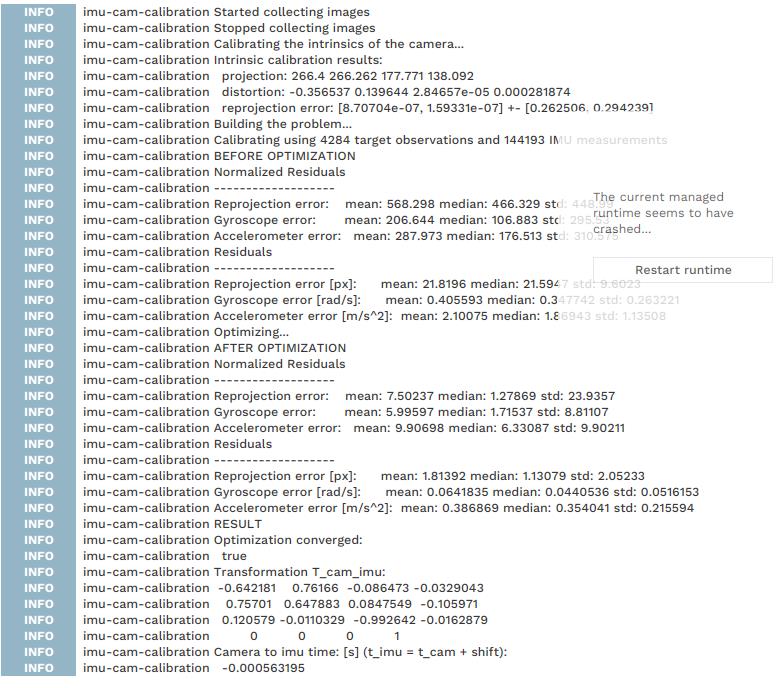
imu-cam-calibration projection: 266.4 266.262 177.771 138.092
imu-cam-calibration distortion: -0.356537 0.139644 2.84657e-05 0.000281874
imu-cam-calibration Calibrating using 4284 target observations and 144193 IMU measurements
imu-cam-calibration Transformation T_cam_imu:
imu-cam-calibration -0.642181 0.76166 -0.086473 -0.0329043
imu-cam-calibration 0.75701 0.647883 0.0847549 -0.105971
imu-cam-calibration 0.120579 -0.0110329 -0.992642 -0.0162879
imu-cam-calibration 0 0 0 1
imu-cam-calibration Camera to imu time: [s] (t_imu = t_cam + shift):
imu-cam-calibration -0.000563195
标定噪声第三次
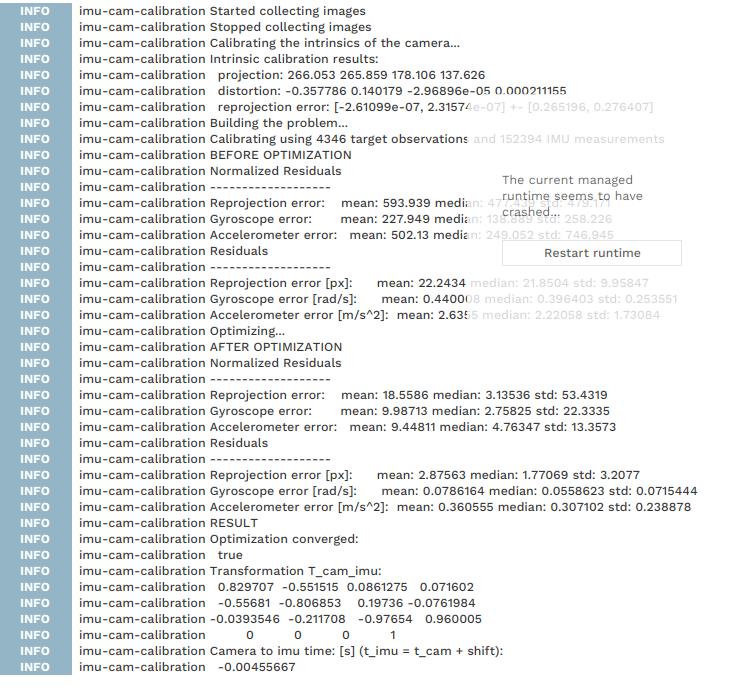
imu-cam-calibration projection: 266.053 265.859 178.106 137.626
imu-cam-calibration distortion: -0.357786 0.140179 -2.96896e-05 0.000211155
imu-cam-calibration Calibrating using 4346 target observations and 152394 IMU measurements
imu-cam-calibration Transformation T_cam_imu:
imu-cam-calibration 0.829707 -0.551515 0.0861275 0.071602
imu-cam-calibration -0.55681 -0.806853 0.19736 -0.0761984
imu-cam-calibration -0.0393546 -0.211708 -0.97654 0.960005
imu-cam-calibration 0 0 0 1
imu-cam-calibration Camera to imu time: [s] (t_imu = t_cam + shift):
imu-cam-calibration -0.00455667
DVXplorer
默认噪声第一次
accelerometer noise density1.49e-3
acceletometer random walk8.69e-5
gyroscope noise density8.09e-5
gyroscope random walk2.29e-6
默认噪声第二次
默认噪声第三次
标定噪声第一次
acc_n: 3.7863819264639269e-02
acc_w: 6.8693717455312715e-04
gyr_n: 3.1745424413195111e-03
gyr_w: 3.3271308846999896e-05
标定噪声第二次
标定噪声第三次
以上是关于ROS实验笔记之——基于dv-gui多次标定event与imu的实验记录的主要内容,如果未能解决你的问题,请参考以下文章