模型训练ubuntu 编译 Darknet 与 YOLO 训练
Posted 极智视界
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了模型训练ubuntu 编译 Darknet 与 YOLO 训练相关的知识,希望对你有一定的参考价值。
欢迎关注我的公众号 [极智视界],回复001获取Google编程规范
O_o >_< o_O O_o ~_~ o_O
大家好,我是极智视界,本文介绍了在 ubuntu 上编译 darknet 及 yolo 训练的方法。
1、编译 darknet
1.1 编译 opencv
关于 cuda 及 cudnn 的安装就不多说了,关于 opencv 的编译可以参考我之前写的《【经验分享】x86、aarch64、arm32环境编译/交叉编译opencv方法》,里面记录了在 x86、aarch64及 arm32 平台上编译 opencv 的方法,简洁有效。
1.2 编译 darknet
clone 源码:
git clone https://github.com/AlexeyAB/darknet.git
cd darknet
修改 Makefile,打开 gpu、opencv、openmp:
GPU=1
CUDNN=1
CUDNN_HALF=1
OPENCV=1
AVX=0
OPENMP=1
LIBSO=1
ZED_CAMERA=0
ZED_CAMERA_v2_8=0
然后开始编译,很简单:
make -j32
完了验证一下是否安装成功:
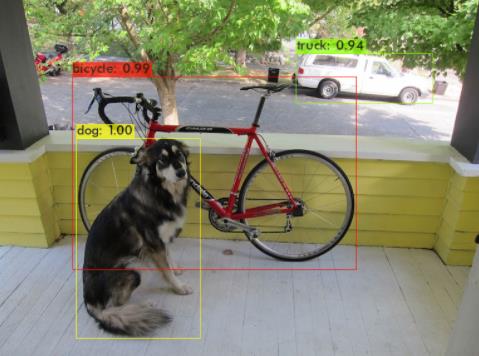
./darknet detect cfg/yolov3.cfg cfg/yolov3.weights data/dog.jpg
当然 yolov3.weights 需要自己下载,传送:https://pjreddie.com/media/files/yolov3.weights
运行成功后,会在 <darknet-path> 目录下生成一张很经典的检测图 predictions.jpg:
2、Yolo 训练
2.1 制作 VOC 数据集
可以制作 VOC 格式的自己的数据集,也可以直接用 VOC 的数据进行训练。
关于 VOC 格式数据怎么制作的,可以参考我的这篇:《【经验分享】目标检测 VOC 格式数据集制作》,里面介绍的比较详细了。
2.2 Yolo 训练
在有了数据集后,然后搞来模型结构文件和预训练权重就可以开启愉快的炼丹之旅。在 cfg 文件夹里其实已经提供了很多的模型结构文件,如 yolov3.cfg、yolov3-tiny.cfg、yolov4.cfg、yolov4-tiny.cfg 等,你只需要找到相应的预训练权重就行了,如:
- yolov3.cfg —> darknet53.conv.74 传送:https://pjreddie.com/media/files/darknet53.conv.74
- yolov3-tiny.cfg —> yolov3-tiny.conv.11 传送:https://drive.google.com/file/d/18v36esoXCh-PsOKwyP2GWrpYDptDY8Zf/view?usp=sharing
- yolov4-tiny.cfg —> yolov4-tiny.conv.29 传送:https://github.com/AlexeyAB/darknet/releases/download/darknet_yolo_v4_pre/yolov4-tiny.conv.29
- yolov4.cfg —> yolov4.conv.137 传送:https://drive.google.com/open?id=1JKF-bdIklxOOVy-2Cr5qdvjgGpmGfcbp
接下来我们以 yolov4 为例,开启咱们愉快的训练之旅吧。
我这里是非桌面环境,所以加了 -dont_show 传参。
./darknet detector train cfg/voc.data cfg/yolov4.cfg yolov4.conv.137 -dont_show
来看以上命令,./darknet detector train 是固定的,其他:
- cfg/voc.data:传训练数据;
- cfg/yolov4.cfg:传训练模型结构;
- yolov4.conv.137:传预训练权重
以上执行训练的命令十分清晰,来看一下 voc.data:
classes= 20 # 目标检测类别数
train = /home/pjreddie/data/voc/train.txt # 训练数据集
valid = /home/pjreddie/data/voc/test.txt # 测试数据集
names = data/voc.names # 类别名称
backup = /home/pjreddie/backup/ # 训练过程中间权重备份目录
在 .cfg 中我们也可以针对自己的训练情况做一些改动,主要是 [net] 内的一些参数:
[net]
batch=64 # batch 设置
subdivisions=32 # 每次传进 batch/subdivision 的数据,若gpu显存不够用,把这个参增大
# Training
width=608 # 图片宽
height=608 # 图片高
channels=3 # 通道数
momentum=0.949 # 动量,影响梯度下降到最优值得速度
decay=0.0005 # 权重衰减正则项,用于防止过拟合
angle=0 # 通过旋转角度增多训练样本
saturation = 1.5 # 通过调整图片饱和度来增多训练样本
exposure = 1.5 # 通过调整曝光度来增多训练样本
hue=.1 # 通过调整色调来增多训练样本
learning_rate=0.0013 # 学习率,这个参数比较重要,决定训练收敛快慢及是否能达到好的效果
burn_in=1000 # 学习率设置相关,当小于该参时更新有一种方式,大于该参时采用policy更新方式
max_batches = 500500 # 训练批次到这个参的时候停止训练
policy=steps # 学习率调整策略
steps=400000,450000 # step和scales是配合使用,这里的意思到400000和450000的时候学习率分别衰减10倍,因为后面慢慢收敛了
scales=.1,.1
#cutmix=1 # cutmix变换,是数据增强的一种方式
mosaic=1 # mosaic变换,是数据增强的一种方式
除了这些外,如果你是训练自己的数据集,检测的类别数就不一定是官方给的 20 了,所以对于 yolo 层也需要做一些修改,拿其中一个 yolo 层来说:
...
[convolutional]
size=1
stride=1
pad=1
filters=75 # filters = 3*(classes+5),这个需要根据你的 classes 数目进行相应修改
activation=linear
[yolo]
mask = 6,7,8
anchors = 12, 16, 19, 36, 40, 28, 36, 75, 76, 55, 72, 146, 142, 110, 192, 243, 459, 401
classes=20 # 检测类别数
num=9
jitter=.3
ignore_thresh = .7
truth_thresh = 1
random=1
scale_x_y = 1.05
iou_thresh=0.213
cls_normalizer=1.0
iou_normalizer=0.07
iou_loss=ciou
nms_kind=greedynms
beta_nms=0.6
max_delta=5
yolo 层中的 anchors 对于不同的检测任务也需要做一定的修改,比如检测人,锚框就需要瘦高型的,如检测车,可能更倾向于窄宽型的锚框,然后像一些置信度阈值、nms阈值等参数也需要训练的时候做一些调参。
然后解释一下为什么需要修改 yolo 上一层卷积的 filters,这个我在这篇《【经验分享】剖析 darknet entry_index 指针偏移逻辑》有做过一定的分析,需要从 yolo 层的数据排布来说:
(1)数据按四维 [N, C, H, W] 来说,N 为 batch,C 为 3 * (5 + classes)、H / W 为 feature_map 高和宽。需要解释一下 C,C = 3 * (1 + 4 + classes),其中 1 表示置信度,4 为检测框位置信息,classes 为类别数,即每个类别给出一个检测得分,乘 3 表示每个格子有 3 个锚框。这样就形成了 yolo 层接受的四维数据排布,也就是 yolo 上一层的输出数据排布;
(2)至于 yolo 层的输出,darknet 里会用一维动态数组来存放 yolo 层的数据,这里就涉及到怎么将四维数据转换为一维数据的问题。darknet 里是这么做的,假设四维数据为 [N, C, H, W] ,每个维度对应的索引为 [n, c, h, w],那么展开就是 n*C*H*W + c*H*W + h*W + w,按这样的逻辑存放到 *output 中。
这样回过头来看应该比较好理解为什么 yolo 上一层卷积的 filters 为 3 * (classes + 5) 了。
好了,接下来我们开始训练吧,还是执行:
./darknet detector train cfg/voc.data cfg/yolov4.cfg yolov4.conv.137 -dont_show
如果需要保存训练日志,可以这么做:
./darknet detector train cfg/voc.data cfg/yolov4l.cfg yolov4.conv.137 2>1 | tee visualization/train_yolov4.log
控制台会输出训练日志:
等训练完就会在 backup = /home/pjreddie/backup/ 保存训练得到的最终及中间权重文件。如果效果满意的话就可以拿去部署,对于目标检测来说,衡量效果怎么样的指标一般就是 map 了。
好了,以上分享了 ubuntu 上编译 darknet 以及训练 yolo 的方法,希望我的分享能对你的学习有一点帮助。
【公众号传送】
扫描下方二维码即可关注我的微信公众号【极智视界】,获取更多AI经验分享,让我们用极致+极客的心态来迎接AI !

以上是关于模型训练ubuntu 编译 Darknet 与 YOLO 训练的主要内容,如果未能解决你的问题,请参考以下文章