针对连续动作的DQN
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了针对连续动作的DQN相关的知识,希望对你有一定的参考价值。
1 前言
跟基于策略梯度的方法比起来,DQN在处理连续状态的问题中 是比较好的。(因为前者是计算Q-table,后者是计算Q-function。前者在状态空间连续的时候是很难计算的)。
同时,DQN是比较容易训练的:在 DQN 里面,你只要能够估计出Q函数,就保证你一定可以找到一个比较好的策略。也就是你只要能够估计出Q函数,就保证你可以改进策略。而估计Q函数这件事情,是比较容易的,因为它就是一个回归问题。在回归问题里面, 你可以轻易地知道模型学习得是不是越来越好,只要看那个回归的损失有没有下降,你就知道说模型学习得好不好,所以估计Q函数相较于学习一个策略是比较容易的。
但是,DQN也存在一些问题,最大的问题是它不太容易处理连续动作。假设动作是连续的,做 DQN 就会有困难。因为在做 DQN 里面一个很重要的一步是你要能够解这个优化问题。估计出 Q函数Q(s,a) 以后,必须要找到一个 a,它可以让 Q(s,a)最大
假如a是连续的,你无法穷举所有可能的连续动作,来看哪一个连续动作可以让 Q 的值最大。
那么,怎么解决这个问题呢?第八章 DQN (连续动作) (datawhalechina.github.io) 提出了四种方案:
2 方案1
采样出 N 个可能的 a: ,一个一个带到 Q函数里面,看那个
,一个一个带到 Q函数里面,看那个 最大。
最大。
当然这不是一个非常精确的做法,因为你没有办法做太多的采样, 所以你估计出来的 Q 值,最后决定的动作可能不是非常的精确
3 方案2
既然要解的是一个优化问题,那么我们要做的其实就是要最大化目标函数Q。
要最大化一个东西, 就可以用梯度上升。
我们就把a当作是参数,然后要找一组a去最大化Q函数,就用梯度上升去更新 a 的值,最后看看能不能找到一个a去最大化Q函数,也就是目标函数。
但这种方案会遇到两个问题:
1)全局最大值的问题,我们可能会停在局部最大值, 就不见得能够真的找到最优的结果。
2)这个运算量会很大,因为我们需要迭代地训练Q函数和a的值。我们训练一个Q函数网络就很花时间了。如果你用梯度上升的方法来计算当前最优的a, 等于是你每次要决定采取哪一个动作的时候,都还要做一次训练网络的过程,显然运算量是很大的。
4 方案3
第三个方案是特别设计一个网络的架构,或者说是特别设计Q函数,使得解 arg max 的问题变得非常容易。
也就是说,这边的Q函数不是一个一般的Q函数,特别设计一下这个Q函数,是的Q函数最大的时候,a比较容易去求得。
怎么去设计这个Q函数,是一个学问。(有些问题可能找不到这样的Q函数,或者Q函数不好找,这也是这一方案的局限性)下面举一个例子:
输入 s,Q函数会输出 3 个东西。向量μ(s),矩阵Σ(s),标量V(s)。
我们知道Q函数是需要输入一个状态s和一个动作a,然后决定一个值。我们现在只输入了s,还没有将a加进来。【这个例子里面a是机器人各个关节的旋转角度,也是一个向量】
于是之后我们处理Q(s,a),用a和μ(s),Σ(s),V一起计算最终的Q
把向量 a 减掉向量μ,取转置,所以它是一个行向量。Σ 是一个矩阵。然后a减掉 μ(s) ,是一个列向量。所以
是一个标量,这个数值就是 这个例子里面的Q(s,a)。

假设 Q(s,a) 定义成这个样子,我们要怎么找到一个a去最大化这个 Q 值呢?这个方案非常简单。
我们人为令Σ是一个正定矩阵(这个由
的设计决定,它直接输出的不是正定矩阵,然后这个矩阵通过一些操作使它变成正定矩阵输入,称为Σ(s))
因而此时
一定是正的,它前面乘上一个负号。所以第一项假设我们不看这个负号的话,第一项的值越小,最终的 Q 值就越大。
怎么让第一项的值最小呢?直接把a代入 μ 的值,让它变成 0,就会让第一项的值最小。
5 方案4
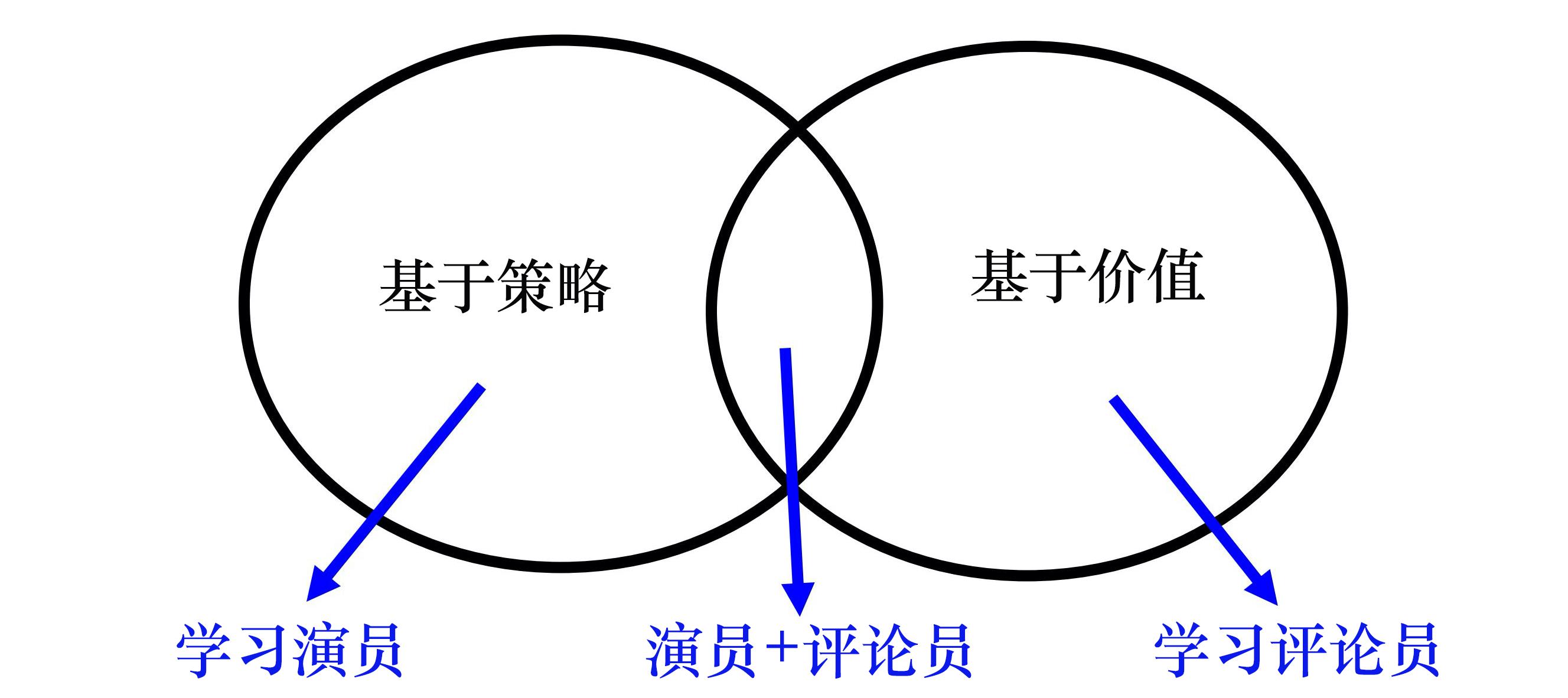
第 4 种方案就是不要用 DQN。用 DQN 处理连续动作还是比较麻烦。 基于策略的方法 PPO 和基于价值的方法 DQN,这两者其实是可以结合在一起的,如下图所示,也就是演员-评论员的方法。
以上是关于针对连续动作的DQN的主要内容,如果未能解决你的问题,请参考以下文章