模型推理deepstream6.0 部署 yolov3 和 yolov4 教程
Posted 极智视界
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了模型推理deepstream6.0 部署 yolov3 和 yolov4 教程相关的知识,希望对你有一定的参考价值。
欢迎关注我的公众号 [极智视界],回复001获取Google编程规范
O_o >_< o_O O_o ~_~ o_O
大家好,我是极智视界,本文介绍了使用 deepstream6.0 部署 yolov3 和 yolov4 的方法。
Yolo 系列是工程中应用十分广泛的目标检测算法,特别是从 yolov3 开始,逐步的进化,到 yolov4、yolov5 等,工程的接受度越来越高。而 deepstream 是英伟达提出的一套加速深度学习落地的 pipeline 应用,那么当 deepstream 遇到 yolo,会擦出什么样的火花呢,让我们来看。
关于 deepstream 的安装教程,可以查阅我之前写的几篇:《【经验分享】ubuntu 安装 deepstream6.0》、《【经验分享】ubuntu 安装 deepstream5.1》。
先来看下 deepstream6.0 source 的目录结构:
- apps
- apps-common
- audio_apps
- sample_apps:例程,如 deepstream-app、deepstream-test1…
- gst-plugins:gstreamer 插件
- include:头
- libs:库
- objectDetector_FasterRCNN:FasterRCNN 示例
- objectDetector_SSD:SSD 示例
- objectDetector_Yolo:YOLO 示例
- tools: 日志相关
文章目录
1、deepstream6.0 部署 yolov3
通过上述的 objectDetector_Yolo 工程来跑 yolov3,在 objectDetector_Yolo 工程里主要关注以下几个模块:
- nvdsinfer_custom_impl_Yolo:yolov3 工程实现代码;
- nvdsinfer_yolo_engine.cpp:解析模型、生成引擎
- nvdsparsebbox_Yolo.cpp:输出层的解析函数,解析目标检测框
- trt_utils.cpp 和 trt_utils.h:构造 TensorRT网络的工具类的接口和实现
- yolo.cpp 和 yolo.h:生成 yolo 引擎的接口和实现
- yoloPlugins.cpp 和 yoloPlugins.h:YoloLayerV3 and YoloLayerV3PluginCreator 的接口和实现
- kernels.cu:cuda核底层实现
- config_infer_xxx_.txt:模型的配置;
- deepstream_app_config_xxx.txt:Gstreamer nvinfer 插件的配置文件;
- xxx.cfg、xxx.weights:模型文件;
有以上这些就够了,下面开始。
1.1 下载模型文件
deepstream6.0 SDK 中是没有 yolov3 的模型文件的,需要自行下载,给出传送。
yolov3.cfg:https://github.com/pjreddie/darknet/blob/master/cfg/yolov3.cfg;
yolov3.weights:https://link.zhihu.com/?target=https%3A//pjreddie.com/media/files/yolov3.weights;
这里多说一句,如果你有 TensorRT 的 yolov3.engine 的话,就不需要原始模型文件了,如果没有 .engine 的话,其实会根据原始文件先生成 .engine。
1.2 配置 config_infer_primary_yolov3.txt
[property]
gpu-id=0
net-scale-factor=0.0039215697906911373
#0=RGB, 1=BGR
model-color-format=0
custom-network-config=yolov3.cfg
model-file=yolov3.weights
labelfile-path=labels.txt
int8-calib-file=yolov3-calibration.table.trt7.0
## 0=FP32, 1=INT8, 2=FP16 mode
network-mode=1
num-detected-classes=80
gie-unique-id=1
network-type=0
is-classifier=0
cluster-mode=2
maintain-aspect-ratio=1
parse-bbox-func-name=NvDsInferParseCustomYoloV3
custom-lib-path=nvdsinfer_custom_impl_Yolo/libnvdsinfer_custom_impl_Yolo.so
engine-create-func-name=NvDsInferYoloCudaEngineGet
[class-attrs-all]
nms-iou-threshold=0.3
threshold=0.7
1.3 配置 deepstream_app_config_yolov3.txt
[application]
enable-perf-measurement=1
perf-measurement-interval-sec=5
[tiled-display]
enable=1
rows=1
columns=1
width=1280
height=720
gpu-id=0
nvbuf-memory-type=0
[source0]
enable=1
type=3
uri=file://../../samples/streams/sample_1080p_h264.mp4
num-sources=1
gpu-id=0
cudadec-memtype=0
[sink0]
enable=1
#Type - 1=FakeSink 2=EglSink 3=File
type=2
sync=0
source-id=0
gpu-id=0
nvbuf-memory-type=0
[osd]
enable=1
gpu-id=0
border-width=1
text-size=15
text-color=1;1;1;1;
text-bg-color=0.3;0.3;0.3;1
font=Serif
show-clock=0
clock-x-offset=800
clock-y-offset=820
clock-text-size=12
clock-color=1;0;0;0
nvbuf-memory-type=0
[streammux]
gpu-id=0
live-source=0
batch-size=1
batched-push-timeout=40000
width=1920
height=1080
enable-padding=0
nvbuf-memory-type=0
[primary-gie]
enable=1
gpu-id=0
#model-engine-file=model_b1_gpu0_int8.engine
labelfile-path=labels.txt
batch-size=1
bbox-border-color0=1;0;0;1
bbox-border-color1=0;1;1;1
bbox-border-color2=0;0;1;1
bbox-border-color3=0;1;0;1
interval=2
gie-unique-id=1
nvbuf-memory-type=0
config-file=config_infer_primary_yoloV3.txt
[tracker]
enable=1
tracker-width=640
tracker-height=384
ll-lib-file=/opt/nvidia/deepstream/deepstream-6.0/lib/libnvds_nvmultiobjecttracker.so
ll-config-file=../../samples/configs/deepstream-app/config_tracker_NvDCF_perf.yml
gpu-id=0
enable-batch-process=1
enable-past-frame=1
display-tracking-id=1
[tests]
file-loop=0
1.4 工程编译
进入到 /opt/nvidia/deepstream/deepstream-6.0/sources/objectDetector_Yolo:
cd /opt/nvidia/deepstream/deepstream-6.0/sources/objectDetector_Yolo
依次执行下面两条命令,编译生成 .so 文件:
export CUDA_VER=11.4 # 设置与设备相同的CUDA版本
或者在 /opt/nvidia/deepstream/deepstream-6.0/sources/objectDetector_Yolo/nvdsinfer_custom_impl_Yolo/Makefile 中修改:

然后执行编译
make -C nvdsinfer_custom_impl_Yolo
编译后会生产动态库文件,生成了 libnvdsinfer_custom_impl_Yolo.so 动态库文件。
1.5 执行
deepstream-app -c deepstream_app_config_yoloV3.txt

这里完成了 deepstream6.0 Yolov3 的部署。
2、deepstream6.0 部署 yolov4
这里以不同的方式来部署一下 yolov4,即直接调用 TensorRT Engine,而不是从原始模型导入。
2.1 使用 darknet2onnx2TRT 生成 yolov4.engine
下载 yolov4 darknet 原始权重,给出百度网盘传送:
https://pan.baidu.com/s/1dAGEW8cm-dqK14TbhhVetA Extraction code:dm5b
clone 模型转换工程:
git clone https://github.com/Tianxiaomo/pytorch-YOLOv4.git Yolov42TRT
开始模型转换:
cd Yolov42TRT
# darknet2onnx
python demo_darknet2onnx.py ./cfg/yolov4.cfg ./cfg/yolov4.weights ./data/dog.jpg 1
# onnx2trt
trtexec --onnx=./yolov4_1_3_608_608_static.onnx --fp16 --saveEngine=./yolov4.engine --device=0
这样就会生成 yolov4.engine。
2.2 deepstream yolov4 推理工程配置
clone deepstream yolov4 推理工程:
git clone https://github.com/NVIDIA-AI-IOT/yolov4_deepstream.git
cd yolov4_deepstream/deepstream_yolov4
配置 config_infer_primary_yoloV4.txt:
[property]
gpu-id=0
net-scale-factor=0.0039215697906911373
#0=RGB, 1=BGR
model-color-format=0
model-engine-file=yolov4.engine
labelfile-path=labels.txt
batch-size=1
## 0=FP32, 1=INT8, 2=FP16 mode
network-mode=2
num-detected-classes=80
gie-unique-id=1
network-type=0
is-classifier=0
## 0=Group Rectangles, 1=DBSCAN, 2=NMS, 3= DBSCAN+NMS Hybrid, 4 = None(No clustering)
cluster-mode=2
maintain-aspect-ratio=1
parse-bbox-func-name=NvDsInferParseCustomYoloV4
custom-lib-path=nvdsinfer_custom_impl_Yolo/libnvdsinfer_custom_impl_Yolo.so
[class-attrs-all]
nms-iou-threshold=0.6
pre-cluster-threshold=0.4
配置 deepstream_app_config_yoloV4.txt:
[application]
enable-perf-measurement=1
perf-measurement-interval-sec=5
[tiled-display]
enable=0
rows=1
columns=1
width=1280
height=720
gpu-id=0
nvbuf-memory-type=0
[source0]
enable=1
type=3
uri=file:/opt/nvidia/deepstream/deepstream-6.0/samples/streams/sample_1080p_h264.mp4
num-sources=1
gpu-id=0
cudadec-memtype=0
[sink0]
enable=1
#Type - 1=FakeSink 2=EglSink 3=File
type=3
sync=0
source-id=0
gpu-id=0
nvbuf-memory-type=0
container=1
codec=1
output-file=yolov4.mp4
[osd]
enable=1
gpu-id=0
border-width=1
text-size=12
text-color=1;1;1;1;
text-bg-color=0.3;0.3;0.3;1
font=Serif
show-clock=0
clock-x-offset=800
clock-y-offset=820
clock-text-size=12
clock-color=1;0;0;0
nvbuf-memory-type=0
[streammux]
gpu-id=0
live-source=0
batch-size=1
batched-push-timeout=40000
width=1280
height=720
enable-padding=0
nvbuf-memory-type=0
[primary-gie]
enable=1
gpu-id=0
model-engine-file=yolov4.engine
labelfile-path=labels.txt
batch-size=1
bbox-border-color0=1;0;0;1
bbox-border-color1=0;1;1;1
bbox-border-color2=0;0;1;1
bbox-border-color3=0;1;0;1
interval=0
gie-unique-id=1
nvbuf-memory-type=0
config-file=config_infer_primary_yoloV4.txt
[tracker]
enable=0
tracker-width=512
tracker-height=320
ll-lib-file=/opt/nvidia/deepstream/deepstream-5.0/lib/libnvds_mot_klt.so
[tests]
file-loop=0
把 2.1 转换生成的 yolov4.engine 拷贝到 /opt/nvidia/deepstream/deepstream-6.0/sources/yolov4_deepstream。
2.3 工程编译
进入到 /opt/nvidia/deepstream/deepstream-6.0/sources/yolov4_deepstream:
cd /opt/nvidia/deepstream/deepstream-6.0/sources/yolov4_deepstream
依次执行下面两条命令,编译生成 .so 文件:
export CUDA_VER=11.4 # 设置与设备相同的CUDA版本
或者在 /opt/nvidia/deepstream/deepstream-6.0/sources/yolov4_deepstream/nvdsinfer_custom_impl_Yolo/Makefile 中修改:
然后执行编译
make -C nvdsinfer_custom_impl_Yolo
编译后会生产动态库文件,生成了 libnvdsinfer_custom_impl_Yolo.so 动态库文件。
2.4 执行
deepstream-app -c deepstream_app_config_yoloV4.txt
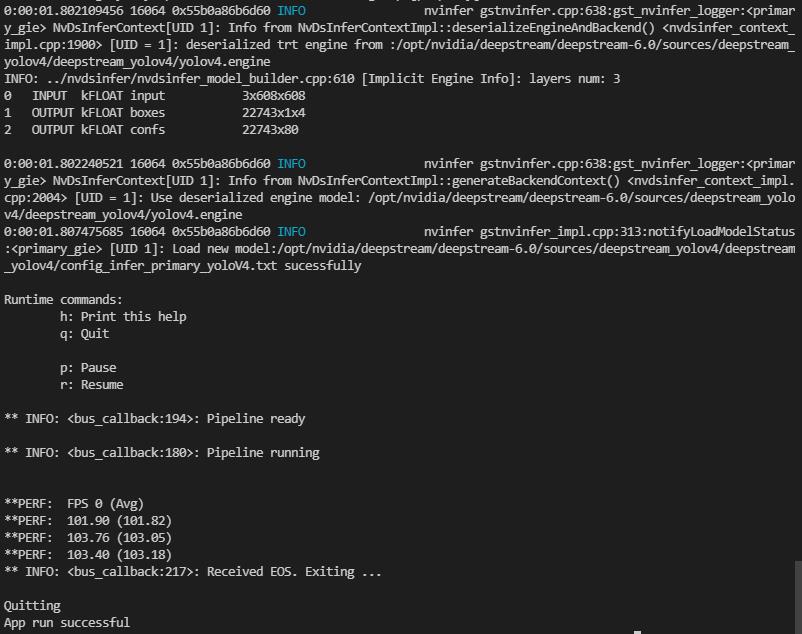
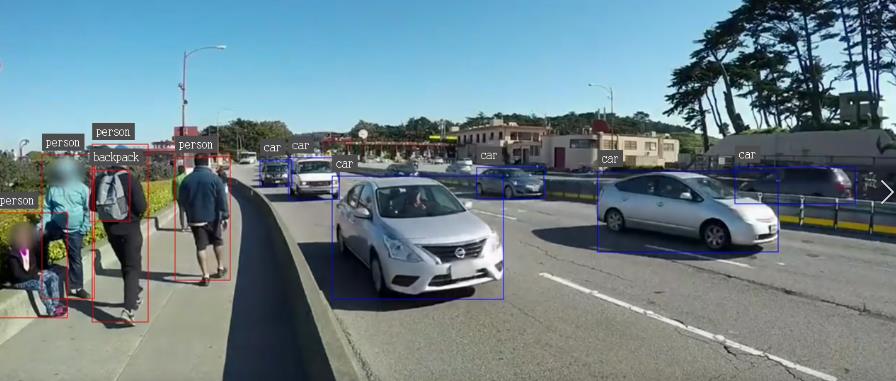
这里完成了 deepstream6.0 Yolov4 的部署。
以上分享了 deepstream6.0 部署 yolov3 和 yolov4 的方法,希望我的分享会对你的学习有一点帮助。
【公众号传送】
扫描下方二维码即可关注我的微信公众号【极智视界】,获取更多AI经验分享,让我们用极致+极客的心态来迎接AI !

以上是关于模型推理deepstream6.0 部署 yolov3 和 yolov4 教程的主要内容,如果未能解决你的问题,请参考以下文章