预测模型基于matlab离散状态空间模型模拟预测控制仿真系统(单输入单输出)含Matlab源码 1537期
Posted 紫极神光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了预测模型基于matlab离散状态空间模型模拟预测控制仿真系统(单输入单输出)含Matlab源码 1537期相关的知识,希望对你有一定的参考价值。
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源: 【预测模型】基于matlab离散状态空间模型模拟预测控制仿真系统(单输入单输出)【含Matlab源码 1537期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、部分源代码
% Testes do controlador preditivo
clear, clc
s = tf('s');
% Definição da planta
Ts = 1;
% G = c2d((50/(20*s+1)),Ts);
% num = cell2mat(G.Numerator);
% den = cell2mat(G.Denominator);
% [A,B,C,D] = tf2ss(num,den);
A = [1 1;0 1];
B = [0.5;1];
C = [1 0];
x_o = [0;0]; % Condições iniciais dos estados
y_o = 0; % Condições iniciais das saídas
% Controle preditivo
Np = 20; Nc = 4; r_w = 0; ref = 1; Nsim = 100;
[y1, u1] = mpc_simulation_siso(A, B, C, y_o, Np, Nc, Nsim, r_w, ref);
Np = 20; Nc = 4; r_w = 1; ref = 1; Nsim = 100;
[y2, u2] = mpc_simulation_siso(A, B, C, y_o, Np, Nc, Nsim, r_w, ref);
Np = 20; Nc = 4; r_w = 100; ref = 1; Nsim = 100;
[y3, u3] = mpc_simulation_siso(A, B, C, y_o, Np, Nc, Nsim, r_w, ref);
t = 0:Nsim-1;
figure
subplot(211)
plot(t,y1,t,y2,t,y3)
grid on
xlabel('Instante de amostragem')
ylabel('Saída do processo')
legend('r_w = 0','r_w = 1','r_w = 100', 'Location', 'Southeast');
subplot(212)
plot(t,u1,t,u2,t,u3)
grid on
xlabel('Instante de amostragem')
ylabel('Sinal de controle')
legend('r_w = 0','r_w = 1','r_w = 100');
function [y, u] = mpc_simulation_siso(A_m, B_m, C_m, y_k, Np, Nc, Nsim, r_w, ref)
%
n1 = length(B_m);
% Condições iniciais:
x = zeros(n1,1); % Condições nulas mencionadas
x = [x; y_k]; % DeltaX = x(0) = [x_m(0); y(0)] - x_m(-1) = 0
u_k = 0; % u(0) = 0;
% Vetores de saídas da função
u = zeros(1,Nsim);
y = zeros(1,Nsim);
% Matrizes importantes a serem usadas
[A, B, C, Phi, F] = mpcgain(A_m, B_m, C_m, Np, Nc);
H_inv = (Phi')*Phi + r_w*eye(Nc); % Matriz Hessiana inversa
if det(H_inv) == 1e-4
error('Hessian Matrix does not exist');
end
Mat_gain = inv(H_inv)*(Phi')*F;
% Ganhos do controlador:
K_mpc = Mat_gain(1,:); % A primeira linha de H*(Phi^T)*F
K_y = K_mpc(length(K_mpc)); % K_y = último elemento de K_mpc
fprintf('Ganhos do controlador:\\nK_mpc = [');
fprintf('%f ',K_mpc);
fprintf(']\\nK_y = %f\\n', K_y);
fprintf('Iniciando a simulação do controlador preditivo...\\n');
for k = 1:Nsim
%Cálculo do esforço de controle Delta_u
deltau = K_y*ref - K_mpc*x;
u_k = deltau + u_k; %Sinal de controle do processo
% Salvando vetor de dados
u(k) = u_k;
y(k) = y_k;
% Aplicando ao processo, utilizando o modelo aumentado do sistema
y_k = C*x; %Saída real do processo
x = A*x + B*deltau; %Vetor de estados x(k)
end
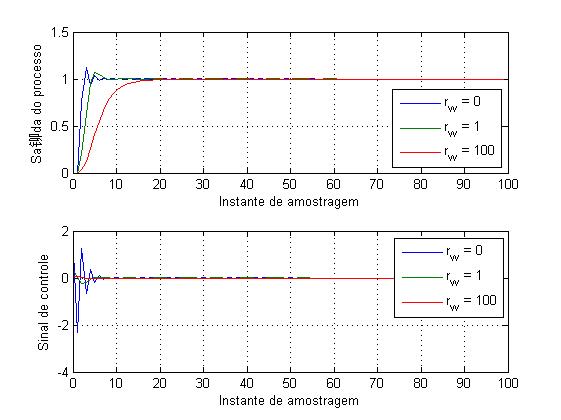
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
以上是关于预测模型基于matlab离散状态空间模型模拟预测控制仿真系统(单输入单输出)含Matlab源码 1537期的主要内容,如果未能解决你的问题,请参考以下文章