PCL:平面模型分割
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL:平面模型分割相关的知识,希望对你有一定的参考价值。
1 原理描述
与RANSAC 平面拟合原理一致,只是实现代码有些差异。
2 代码实现
#include <pcl/io/pcd_io.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/extract_indices.h>
using namespace std;
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
int main()
//-------------------------- 加载点云 --------------------------
cout << "->正在加载点云..." << endl;
PointCloudT::Ptr cloud(new PointCloudT);
if (pcl::io::loadPCDFile("desk.pcd", *cloud) < 0)
PCL_ERROR("\\a点云文件不存在!\\n");
system("pause");
return -1;
cout << "->加载点数:" << cloud->points.size() << endl;
//========================== 加载点云 ==========================
//-------------------------- 平面分割 --------------------------
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients); //模型系数
pcl::PointIndices::Ptr inliers(new pcl::PointIndices); //模型内点
pcl::SACSegmentation<PointT> seg; //创建分割对象
seg.setOptimizeCoefficients(true); //优化模型系数(可选设置)
seg.setModelType(pcl::SACMODEL_PLANE); //设置模型类型
seg.setMethodType(pcl::SAC_RANSAC); //设置方法类型
seg.setDistanceThreshold(0.01); //设置点到拟合平面的距离阈值
seg.setInputCloud(cloud->makeShared()); //设置输入点云,深拷贝,返回指向cloud的智能指针,等价于seg.setInputCloud(cloud);
seg.segment(*inliers, *coefficients); //执行分割。将内点和模型系数分别保存至inliers、coefficients
if (inliers->indices.size() == 0)
PCL_ERROR("\\a->无法从给定的数据集估计出一个平面!\\n");
system("pause");
return (-1);
cout << "->平面模型系数: "
<< coefficients->values[0] << " "
<< coefficients->values[1] << " "
<< coefficients->values[2] << " "
<< coefficients->values[3] << endl;
cout << "->平面模型内点个数: " << inliers->indices.size() << endl;
//========================== 平面分割 ==========================
//-------------------------- 平面提取 --------------------------
PointCloudT::Ptr cloud_indice(new PointCloudT);
/// 方法1,较为简单,一行代码即可实现
//pcl::copyPointCloud(*cloud, inliers->indices, *cloud_indice);
/// 方法2,较为繁琐
pcl::IndicesPtr index_ptr(new vector<int>(inliers->indices));//智能指针转换
pcl::ExtractIndices<PointT> extract;//创建提取对象
extract.setInputCloud(cloud); //设置输入点云
extract.setIndices(index_ptr); //设置内点索引
extract.setNegative(false); //默认false,提取索引内的点;true,提取索引外的点
extract.filter(*cloud_indice); //执行提取,将结果保存至cloud_indice
//========================== 平面提取 ==========================
//-------------------------- 保存平面 --------------------------
pcl::io::savePCDFileBinary("plane.pcd", *cloud_indice);
cout << "->保存点云点数:" << cloud_indice->points.size() << endl;
//========================== 保存平面 ==========================
return 0;
输出结果:
->正在加载点云...
->加载点数:41049
->平面模型系数: -0.00660275 -0.87506 -0.483969 -1.17755
->平面模型内点个数: 20161
->保存点云点数:20161
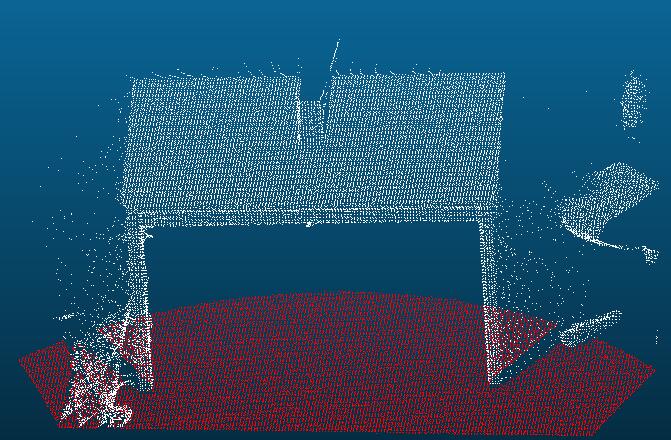
3 结果展示
红色为分割出的平面点云,白色为原始点云。
4 相关链接
以上是关于PCL:平面模型分割的主要内容,如果未能解决你的问题,请参考以下文章