Python控制单片机 TPYBoard MicroPython v202链接DTH11 温湿度 mqtt上传数据,具体实现。
Posted Bryant James
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Python控制单片机 TPYBoard MicroPython v202链接DTH11 温湿度 mqtt上传数据,具体实现。相关的知识,希望对你有一定的参考价值。
TPYBoard MicroPython v202链接DTH11 mqtt上传数据,具体实现。手打不易,给物联网人点个赞吧
先看效果图与硬件连接示意图
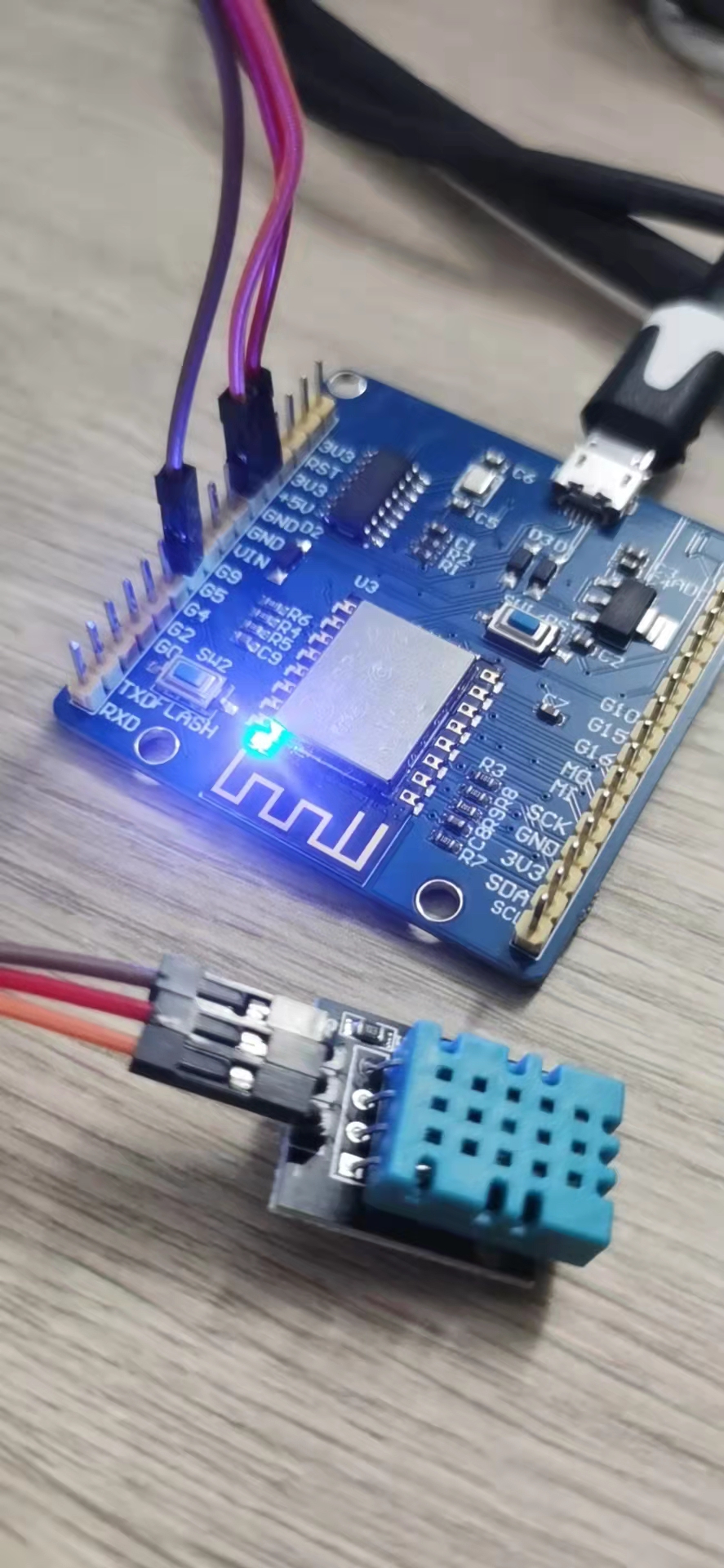
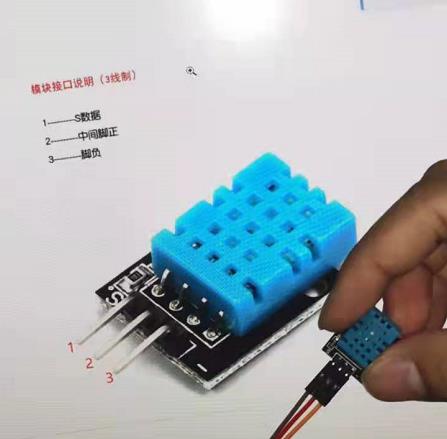
DHT连接示意图
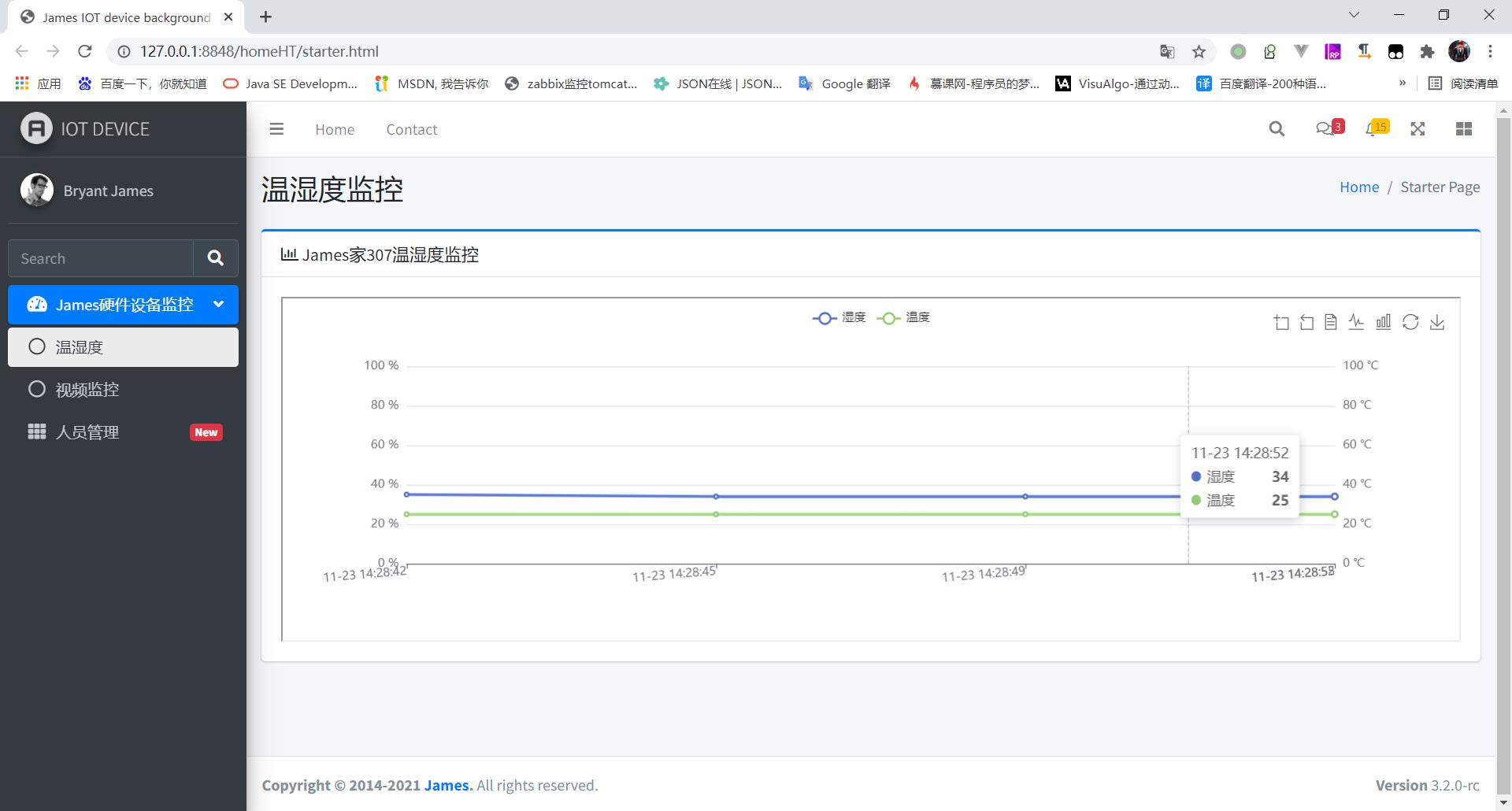
前端展示:
一共四个python文件,我用的是GPIO5,代码这么写
simple.py应该这么写,这个是通过socket连接mqtt的简易包
import usocket as socket
import ustruct as struct
from ubinascii import hexlify
class MQTTException(Exception):
pass
class MQTTClient:
def __init__(self, client_id, server, port=0, user=None, password=None, keepalive=0,
ssl=False, ssl_params=):
if port == 0:
port = 8883 if ssl else 1883
self.client_id = client_id
self.sock = None
self.server = server
self.port = port
self.ssl = ssl
self.ssl_params = ssl_params
self.pid = 0
self.cb = None
self.user = user
self.pswd = password
self.keepalive = keepalive
self.lw_topic = None
self.lw_msg = None
self.lw_qos = 0
self.lw_retain = False
def _send_str(self, s):
self.sock.write(struct.pack("!H", len(s)))
self.sock.write(s)
def _recv_len(self):
n = 0
sh = 0
while 1:
b = self.sock.read(1)[0]
n |= (b & 0x7f) << sh
if not b & 0x80:
return n
sh += 7
def set_callback(self, f):
self.cb = f
def set_last_will(self, topic, msg, retain=False, qos=0):
assert 0 <= qos <= 2
assert topic
self.lw_topic = topic
self.lw_msg = msg
self.lw_qos = qos
self.lw_retain = retain
def connect(self, clean_session=True):
self.sock = socket.socket()
addr = socket.getaddrinfo(self.server, self.port)[0][-1]
self.sock.connect(addr)
if self.ssl:
import ussl
self.sock = ussl.wrap_socket(self.sock, **self.ssl_params)
premsg = bytearray(b"\\x10\\0\\0\\0\\0\\0")
msg = bytearray(b"\\x04MQTT\\x04\\x02\\0\\0")
sz = 10 + 2 + len(self.client_id)
msg[6] = clean_session << 1
if self.user is not None:
sz += 2 + len(self.user) + 2 + len(self.pswd)
msg[6] |= 0xC0
if self.keepalive:
assert self.keepalive < 65536
msg[7] |= self.keepalive >> 8
msg[8] |= self.keepalive & 0x00FF
if self.lw_topic:
sz += 2 + len(self.lw_topic) + 2 + len(self.lw_msg)
msg[6] |= 0x4 | (self.lw_qos & 0x1) << 3 | (self.lw_qos & 0x2) << 3
msg[6] |= self.lw_retain << 5
i = 1
while sz > 0x7f:
premsg[i] = (sz & 0x7f) | 0x80
sz >>= 7
i += 1
premsg[i] = sz
self.sock.write(premsg, i + 2)
self.sock.write(msg)
#print(hex(len(msg)), hexlify(msg, ":"))
self._send_str(self.client_id)
if self.lw_topic:
self._send_str(self.lw_topic)
self._send_str(self.lw_msg)
if self.user is not None:
self._send_str(self.user)
self._send_str(self.pswd)
#print("---------------------")
#print(str(self.sock.read(1024)))
resp = self.sock.read(4)
assert resp[0] == 0x20 and resp[1] == 0x02
if resp[3] != 0:
raise MQTTException(resp[3])
return resp[2] & 1
def disconnect(self):
self.sock.write(b"\\xe0\\0")
self.sock.close()
def ping(self):
self.sock.write(b"\\xc0\\0")
def publish(self, topic, msg, retain=False, qos=1):
pkt = bytearray(b"\\x30\\0\\0\\0")
pkt[0] |= qos << 1 | retain
sz = 2 + len(topic) + len(msg)
if qos > 0:
sz += 2
assert sz < 2097152
i = 1
while sz > 0x7f:
pkt[i] = (sz & 0x7f) | 0x80
sz >>= 7
i += 1
pkt[i] = sz
#print(hex(len(pkt)), hexlify(pkt, ":"))
self.sock.write(pkt, i + 1)
self._send_str(topic)
if qos > 0:
self.pid += 1
pid = self.pid
struct.pack_into("!H", pkt, 0, pid)
self.sock.write(pkt, 2)
self.sock.write(msg)
if qos == 1:
while 1:
op = self.wait_msg()
if op == 0x40:
sz = self.sock.read(1)
assert sz == b"\\x02"
rcv_pid = self.sock.read(2)
rcv_pid = rcv_pid[0] << 8 | rcv_pid[1]
if pid == rcv_pid:
return
elif qos == 2:
assert 0
def subscribe(self, topic, qos=0):
assert self.cb is not None, "Subscribe callback is not set"
pkt = bytearray(b"\\x82\\0\\0\\0")
self.pid += 1
struct.pack_into("!BH", pkt, 1, 2 + 2 + len(topic) + 1, self.pid)
#print(hex(len(pkt)), hexlify(pkt, ":"))
self.sock.write(pkt)
self._send_str(topic)
self.sock.write(qos.to_bytes(1, "little"))
while 1:
op = self.wait_msg()
if op == 0x90:
resp = self.sock.read(4)
#print(resp)
assert resp[1] == pkt[2] and resp[2] == pkt[3]
if resp[3] == 0x80:
raise MQTTException(resp[3])
return
# Wait for a single incoming MQTT message and process it.
# Subscribed messages are delivered to a callback previously
# set by .set_callback() method. Other (internal) MQTT
# messages processed internally.
def wait_msg(self):
res = self.sock.read(1)
self.sock.setblocking(True)
if res is None:
return None
if res == b"":
raise OSError(-1)
if res == b"\\xd0": # PINGRESP
sz = self.sock.read(1)[0]
assert sz == 0
return None
op = res[0]
if op & 0xf0 != 0x30:
return op
sz = self._recv_len()
topic_len = self.sock.read(2)
topic_len = (topic_len[0] << 8) | topic_len[1]
topic = self.sock.read(topic_len)
sz -= topic_len + 2
if op & 6:
pid = self.sock.read(2)
pid = pid[0] << 8 | pid[1]
sz -= 2
msg = self.sock.read(sz)
self.cb(topic, msg)
if op & 6 == 2:
pkt = bytearray(b"\\x40\\x02\\0\\0")
struct.pack_into("!H", pkt, 2, pid)
self.sock.write(pkt)
elif op & 6 == 4:
assert 0
# Checks whether a pending message from server is available.
# If not, returns immediately with None. Otherwise, does
# the same processing as wait_msg.
def check_msg(self):
self.sock.setblocking(False)
return self.wait_msg()
在boot.py应该这么写
这个是连接你的WiFi的,因为202带了一个8266的wifi芯片
def do_connect():
import network
sta_if = network.WLAN(network.STA_IF)
ap_if = network.WLAN(network.AP_IF)
if ap_if.active():
ap_if.active(False)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect('AshCloud', 'Passw0rd@1213|0412') #wifi的SSID和密码
while not sta_if.isconnected():
pass
print('network config:', sta_if.ifconfig())
do_connect()
#gc.collect()
连接以及读取数据mqtt.py
server用你自己的,我是在阿里云搭建的。
from simple import MQTTClient
from machine import Pin
import dht
import machine
import micropython
import time#声明用到的类库,尤其是dht的类库
import json
#选择G4引脚
p2 = Pin(2, Pin.OUT)
p2.value(1)
# MQTT服务器地址域名为:183.230.40.39,不变
SERVER = "youself server"
#设备ID
CLIENT_ID = "aa485f13cfberw3b0"
#这些都要根据你自己设置的改
TOPIC = b"status/online"
#产品ID
username='james'
#产品APIKey:
password='huaxinfeng520'
state = 0
#读取DTH11
d = dht.DHT11(machine.Pin(5))#声明用到类库中的函数,并设置参数
led = Pin(2, Pin.OUT)
h='0'
t='0'
#要上报的数据点
z =
'h':h,
't':t
def pubdata(data):
j_d = json.dumps(data)
j_l = len(j_d)
arr = bytearray(j_l)
arr[0:] = j_d.encode('UTF-8') # json数据
return arr
def sub_cb(topic, msg):
global state
print((topic, msg))
if msg == b"on":
p2.value(1)
state = 1
print("1")
elif msg == b"off":
p2.value(0)
state = 0
print("0")
elif msg == b"toggle":
state = 1 - state
p2.value(state)
def main(server=SERVER):
print(json.dumps(z))
#端口号为:1883
c = MQTTClient(CLIENT_ID, server,1883,username,password)
c.set_callback(sub_cb)
c.connect()
c.subscribe(TOPIC)
print("Connected to %s, subscribed to %s topic" % (server, TOPIC))
while 1:
d.measure()#调用DHT类库中测量数据的函数
temp_=str(d.temperature())#读取measure()函数中的温度数据
hum_=str(d.humidity())#读取measure()函数中的湿度数据
print('wendu:',temp_,'-shidu:',hum_)
z['h']=hum_
z['t']=temp_
c.publish(topic=TOPIC,msg=pubdata(z))
time.sleep(3)
try:
while 1:
c.wait_msg()
finally:
c.disconnect()
最后就是在main.py调用
import mqtt
mqtt.main()
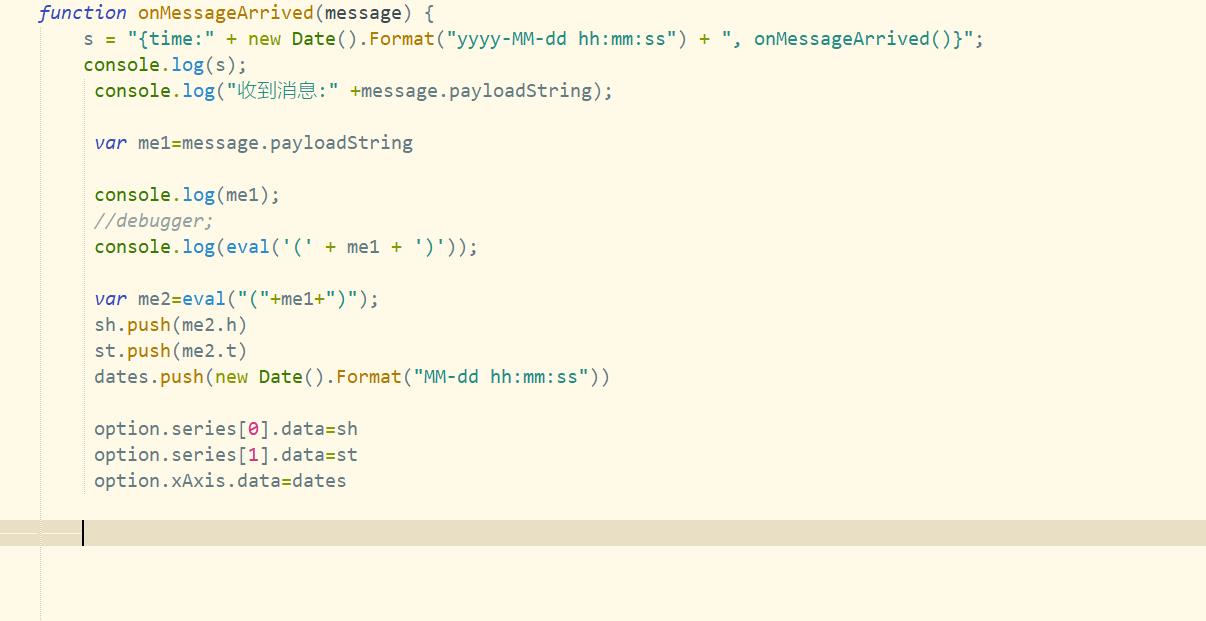
前端代码如果需要可以找我微信:huadaxiano1
前端主要是解析数据set进Echarts里面去
很感谢你看完了给我点个赞吧谢谢了
业精于勤,荒于嬉;行成于思,毁于随。
以上是关于Python控制单片机 TPYBoard MicroPython v202链接DTH11 温湿度 mqtt上传数据,具体实现。的主要内容,如果未能解决你的问题,请参考以下文章
[Micropython]TPYBoard v10x拼插编程实验 点亮心形点阵
MicroPython实例之TPYBoard开发板控制OLED显示中文
TPYBoard:一款可以发挥无限创意的MicroPython开发板
Micropython TPYBoard 控制无线加速度小车