PCL:基于区域生长的点云分割——保存分割结果
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL:基于区域生长的点云分割——保存分割结果相关的知识,希望对你有一定的参考价值。
与 欧式聚类保存聚类结果的方法类似。
1 区域生长分割原理
2 代码实现
#include <pcl/io/pcd_io.h>
#include <pcl/search/search.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/segmentation/region_growing.h>
using namespace std;
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
int main()
//------------------------------- 加载点云 -------------------------------
cout << "->正在加载点云..." << endl;
PointCloudT::Ptr cloud(new PointCloudT);
if (pcl::io::loadPCDFile("road.pcd", *cloud) < 0)
PCL_ERROR("\\a点云文件不存在!\\n");
system("pause");
return (-1);
cout << "->加载点的个数:" << cloud->points.size() << endl;
//========================================================================
//------------------------------- 法线估计 -------------------------------
cout << "->正在估计点云法线..." << endl;
pcl::NormalEstimation<PointT, pcl::Normal> ne; //创建法线估计对象ne
pcl::search::Search<PointT>::Ptr tree(new pcl::search::KdTree<PointT>); //设置搜索方法
pcl::PointCloud <pcl::Normal>::Ptr normals(new pcl::PointCloud <pcl::Normal>); //存放法线
ne.setSearchMethod(tree);
ne.setInputCloud(cloud);
ne.setKSearch(20);
ne.compute(*normals);
//========================================================================
//------------------------------- 区域生长 -------------------------------
cout << "->正在进行区域生长..." << endl;
pcl::RegionGrowing<PointT, pcl::Normal> rg; //创建区域生长分割对象
rg.setMinClusterSize(50); //设置满足聚类的最小点数
rg.setMaxClusterSize(99999999); //设置满足聚类的最大点数
rg.setSearchMethod(tree); //设置搜索方法
rg.setNumberOfNeighbours(30); //设置邻域搜索的点数
rg.setInputCloud(cloud); //设置输入点云
rg.setInputNormals(normals); //设置输入点云的法向量
rg.setSmoothnessThreshold(3.0 / 180.0 * M_PI); //设置平滑阈值,弧度,用于提取同一区域的点
rg.setCurvatureThreshold(1); //设置曲率阈值,如果两个点的法线偏差很小,则测试其曲率之间的差异。如果该值小于曲率阈值,则该算法将使用新添加的点继续簇的增长
vector<pcl::PointIndices> clusters; //聚类索引向量
rg.extract(clusters); //获取聚类结果,并保存到索引向量中
cout << "->聚类个数为" << clusters.size() << endl;
//========================================================================
//---------------------- 为聚类点云添加颜色,并可视化 ----------------------
PointCloudT::Ptr colored_cloud = rg.getColoredCloud();
pcl::visualization::CloudViewer viewer("区域生长结果");
viewer.showCloud(colored_cloud);
while (!viewer.wasStopped())
//========================================================================
//---------------------------- 提取区域生长聚类 ---------------------------
int count = 0;
pcl::PCDWriter writer;
for (vector<pcl::PointIndices>::const_iterator it = clusters.begin(); it != clusters.end(); ++it)
PointCloudT::Ptr cloud_cluster(new PointCloudT);
for (vector<int>::const_iterator pit = it->indices.begin(); pit != it->indices.end(); pit++)
cloud_cluster->points.push_back(colored_cloud->points[*pit]);
cloud_cluster->width = cloud_cluster->points.size();
cloud_cluster->height = 1;
cloud_cluster->is_dense = true;
stringstream ss;
ss << "cluster_" << count + 1 << ".pcd";
writer.write(ss.str(), *cloud_cluster, true);
cout << ss.str() << "点数:" << cloud_cluster->points.size() << endl;
count++;
//========================================================================
return (0);
输出结果:
->正在加载点云...
->加载点的个数:200293
->正在估计点云法线...
->正在进行区域生长...
->聚类个数为31
cluster_1.pcd点数:10095
cluster_2.pcd点数:95928
cluster_3.pcd点数:13204
cluster_4.pcd点数:11475
cluster_5.pcd点数:6599
cluster_6.pcd点数:342
cluster_7.pcd点数:1634
cluster_8.pcd点数:557
cluster_9.pcd点数:80
cluster_10.pcd点数:2455
cluster_11.pcd点数:108
cluster_12.pcd点数:253
cluster_13.pcd点数:66
cluster_14.pcd点数:196
cluster_15.pcd点数:971
cluster_16.pcd点数:52
cluster_17.pcd点数:62
cluster_18.pcd点数:61
cluster_19.pcd点数:155
cluster_20.pcd点数:58
cluster_21.pcd点数:96
cluster_22.pcd点数:65
cluster_23.pcd点数:58
cluster_24.pcd点数:64
cluster_25.pcd点数:84
cluster_26.pcd点数:90
cluster_27.pcd点数:64
cluster_28.pcd点数:69
cluster_29.pcd点数:114
cluster_30.pcd点数:59
cluster_31.pcd点数:67
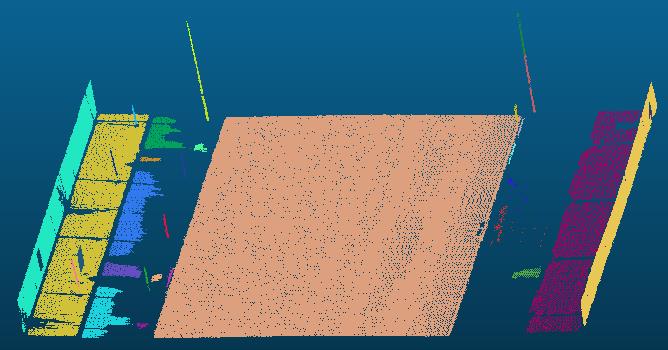
3 结果展示
不满足聚类条件的,显示为红色(主要为树木点云)

将保存的分割结果导入到CloudCompare中,结果如下:
4 相关链接
以上是关于PCL:基于区域生长的点云分割——保存分割结果的主要内容,如果未能解决你的问题,请参考以下文章