第十七届智能车竞赛智能视觉组比赛细则
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十七届智能车竞赛智能视觉组比赛细则相关的知识,希望对你有一定的参考价值。

§01 智能车竞赛
一、背景介绍
第十七届 全国大学生智能车竞赛 将于2022年暑期举行, 竞速比赛规则 已于2021年11月公布。竞速比赛分为九个赛题组,其中“智能视觉组”、“完全模型组”两个组别具有更加复杂的机器视觉处理和模型车运动控制任务,比赛详细内容将会另行通过比赛细则进行说明。
本文是智能视觉组比赛细则。比赛细则正式文档将会公布在全国大学生智能车竞赛网站。

▲ 图1 全国大学生智能车竞赛网站
二、智能视觉组描述
在智能车竞赛竞赛比赛规则中对于智能视觉组比赛任务有了初步的描述。摘抄如下:
1、车模
车模使用H/M车模。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
微控制器使用NXP公司的单片机与视觉模块。
传感器可以包括有摄像头,CCD,光电管等。
3、赛道与比赛任务
比赛场地采用与信标相同的场地。场地内存在Apriltag标识物,位置已知;场地内随机放置5 ~ 20 个图片内容,位置已知;车模从出发点出发后,依次找到图片位置并识别内容。根据识别大类,将图片(带有磁性)搬运到赛道指定位置。
§02 比赛细则
一、比赛场地
1、比赛环境
与传统的“信标组”比赛环境相同,比赛场地部署在室内无阳光直射的场地,地面保持基本平整。场地周围50厘米范围内没有其他障碍物。比赛场地外可以设置高度超过50厘米的围挡,以防止竞赛车模冲出赛场。
2、比赛场地
(1)场地形状与尺寸
比赛场地形状矩形,边长在五米至七米的范围内。场地内铺设有普通蓝色广告布,与普通赛道组背景材质一致。赛场边界黄色封箱胶带进行固定并标示场地位置。
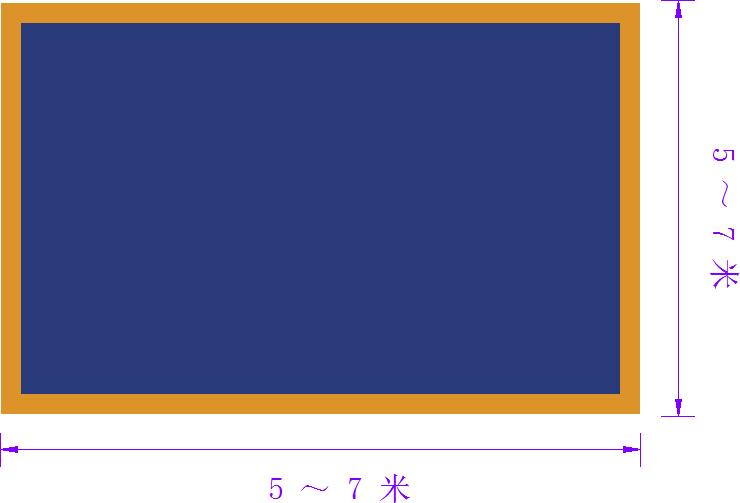
▲ 图2.1.1 比赛场地示意图
(2)场地坐标
为了便于智能车在完成任务过程中对于行驶路径进行优化,比赛前将会把场地内搜索识别目标的位置通过图片识别的方式告知智能车。为了表示车模以及识别目标在场地内的位置,对比赛场地建立相应平面坐标系。
从场地内左下角开始,往左、往上设置两个相互垂直坐标轴:X方向坐标轴和Y方向坐标轴。以20厘米间隔作为长度的标准单位。
场地内存在着边长为20厘米的虚拟坐标网格,目标与车模在场地内的坐标就以其中心所在网格对应的坐标(Xn,Yn)来表示。场地内靠近原地的第一个网格坐标为(1,1),这也是比赛中车模的出发点。
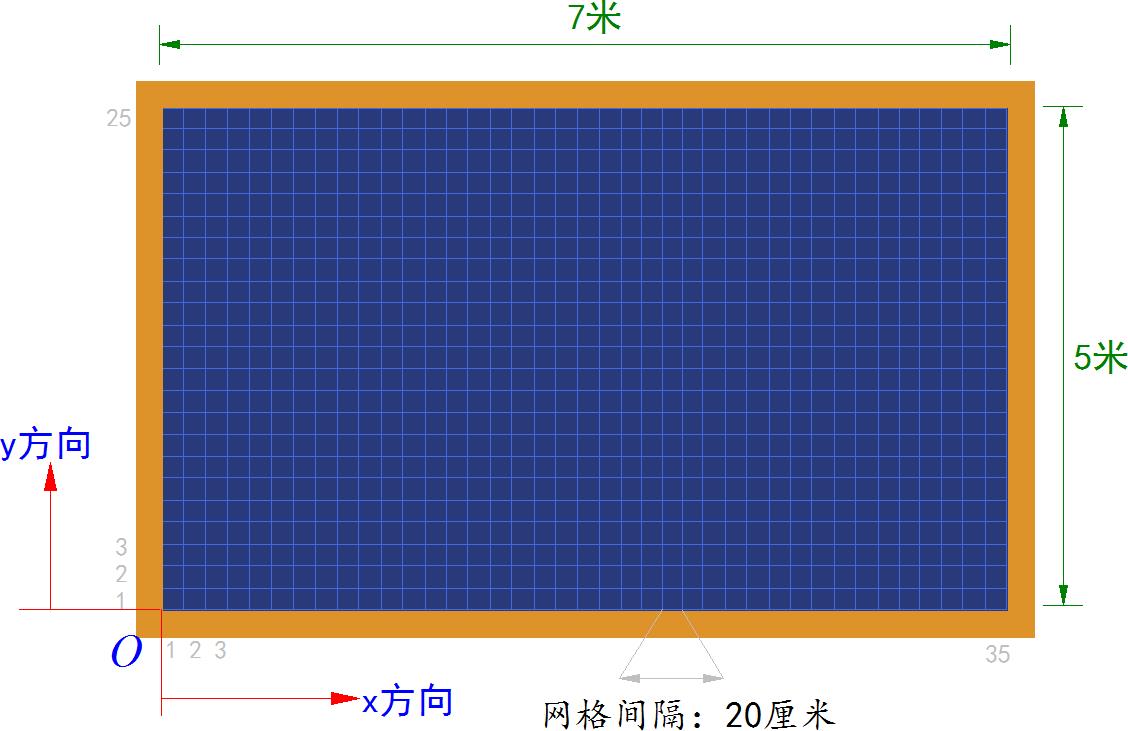
▲ 图2.1.2 比赛场地坐标
● 注:场地内地面并没有视觉可见的坐标网格,智能车模需要使用Apriltag视觉定位、惯性导航、里程计、电子罗盘等传感器辅助定位。
3、Apriltag定位
车模在场地内运行时可以使用IMU、里程计、电子罗盘等辅助进行定位。不允许使用UWB,GPS,RTK等辅助定位。
为了增加定位精度,在竞赛场地内还设置有多个Apriltag标示立方体用于视觉辅助定位。
(1)Apriltag立方体
Apriltag立方体使用白色KT板,或者类似板材搭建成正立方体。外观是白色,或者覆盖有白色纸张。立方体的四周张贴有相同的Apriltag图片。每个立方体所使用的Apriltag码各不相同,在场地内的位置也不同。
位置立方体是放置在场地内固定位置,位置在比赛前进行公布。车模在运行过程中不允许撞击立方体。
Ⅰ.Apriltag立方体尺寸
立方体的边长为20厘米。 Aprilta码图片的尺寸为18厘米,粘贴在立方体四个侧面中心位置。
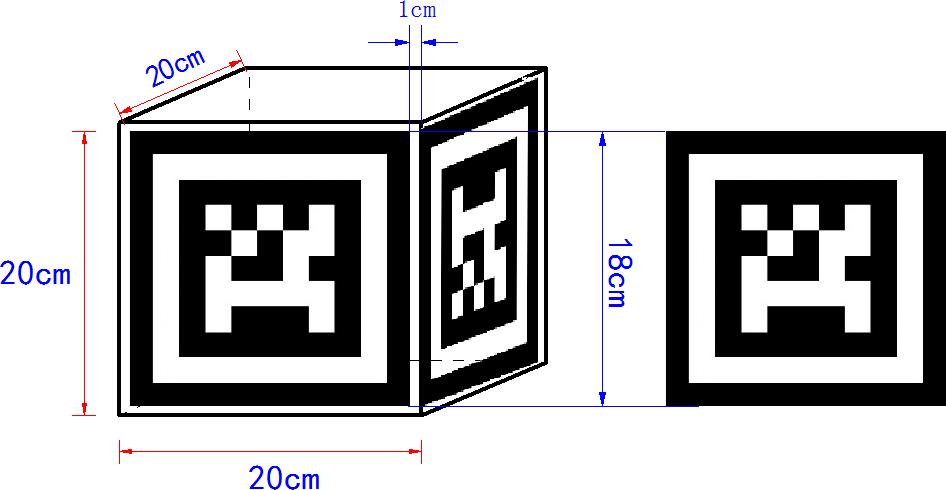
▲ 图2.1.3 Apriltag立方体的尺寸
Ⅱ.Apriltag系列
Apriltag码使用使用Tag25h9系列中的前十个Apriltag图片。

▲ 图2.1.4 使用Tag25h9系列中的前十个Apriltag图片
(2)Apriltag位置
在每个场地的四周和中心会布置有十个左右的Apriltag立方体,它们大体位于场地内四个边界以及场地中间。具体所处的位置(Xn,Yn)会在比赛前进行公布。下面是一种Apriltag立方体摆放示意图,其中摆放了10个Apriltag立方体,旁边的数字是他们所在的位置。
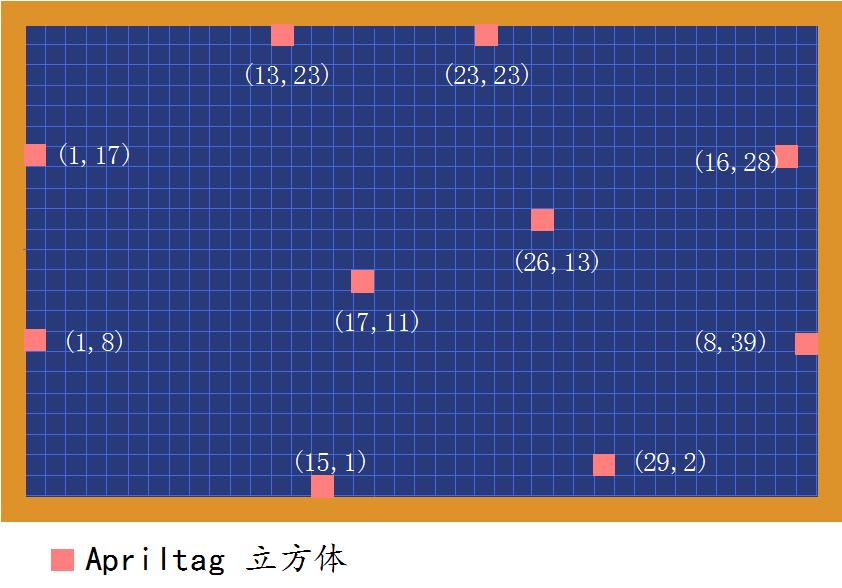
▲ 图2.1.5 Apriltag立方体在场地内分布示意图
二、比赛任务
智能视觉组的基本比赛任务为:从位置(1,1)出发,完成对场地内 5 ~ 20个目标的搜索、识别与搬运。比赛完成任务的时间,时间短者胜利。
对于识别搜索遗漏、识别错误、搬运识别等将会通过相应的加罚时间叠加在比赛任务时间上。
1、搜索目标结构
搜索和搬运目标物是由KT板,或者相类似的材质制作的圆盘。为了便于运动车模搬运,在圆盘底部粘贴有方形铁片,可以被电磁铁吸引。圆盘的正面粘贴或者喷涂有用于识别的图片。

▲ 图2.2.1 圆形的识别目标
圆盘的半径在7.5厘米到9厘米之间的范围,厚度小于5毫米。铁片的尺寸在10厘米到12厘米之间。
▲ 图2.2.2 圆形目标物尺寸
2、搜索目标种类
搜索目标图片种类包括有三大类,每一大类又包括有五种小类。
- 动物: 狗、马、猫、牛、猪
- 水果: 橙子、苹果、榴莲、葡萄、香蕉
- 交通工具: 火车、轮船、飞机、小轿车、大客车
▲ 图2.2.3 识别目标数据库
目标集合数据库竞赛组委会将会另行发布。
在识别过程中,需要将识别物品的种类(属于哪一大类,哪一小类)的信息实时无线发送到比赛系统。
3、目标搬运方位
车模从发车区(1,1)出发后,搜索所有目标后,根据目标的大类将目标搬运到赛场边缘。下图给出了三种目标大类最终搬运后所在的区域。
目标圆盘需要最终位于赛场黄色边界线以外。
▲ 图2.2.4 目标最终搬运区域
在比赛的某些阶段,为了降低比赛难度,可能只要求车模完成目标的搜索识别,不要求对目标进行搬运。
4、识别结果发送显示
为了显示车模识别搜寻轨迹、搜索时间以及识别结果,车模需要实时通过无线模块发送运行信息。
(1)无线模块接口
无线通讯模块在竞赛的时候有竞赛组委会提供,它自带电源。
Ⅰ.接口机械结构
外部接口为3pin,100mil的插座接口(母头)。
-
无线通信模块接头定义:
-
● 红线:+3.3V
● 黑线:地线
● 蓝线:TXD
▲ 图2.2.5 无线模块接口
参赛车模的电路板上需要有无线通信接口插座,或者公头空中接头。
Ⅱ.接口电气协议
接口采用UART发送模式。信号电平采用 TTL电平。
-
接口电气协议:
-
● 低电平:小于0.5V
● 高电平:2V ~ 5V
● 空闲位:高电平
Ⅲ.接口通讯协议
-
接口底层协议:
-
● 波特率:115200
● 数据位:8位
● 停止位:1位
● 奇偶校验:无
(2)信息格式
信息编码采用ASCII码,每一条信息是由若干由一个空格隔离字段组成,每一条信息有换行符('\\n')结束。
发送一条信息的字段定义如下:
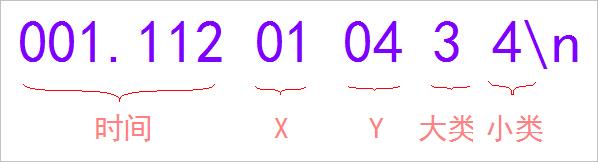
▲ 图2.2.7 发送信息字段定义
- 时间字段: 单位是秒,从开始比赛到发送信息时单片机时间。
- X字段: 是车模所处在场地坐标X值;
- Y自动: 是车模所处在场地坐标Y值;
- 识别大类: 识别目标的大类:
- 1,2,3:分别表示动物,水果,交通工具;
- 0 :表示没有目标,正处在搜索过程;
- 9 : 表示现在正在搬运目标;
- 其他值:无效值;
- 识别小类: 表示识别目标的小类别:
- 1,2,3,4,5:分别表示目标的小类别;
- 动物:1-狗;2-马;3-猫;4-牛;5-猪;
- 水果:1-橙子;2-苹果;3-榴莲;4-葡萄;5-香蕉;
- 交通工具:1-火车;2-轮船;3-飞机;4-小轿车;5-大客车;
- 0 : 表示没有目标;
- 其他值:无效值;
- 1,2,3,4,5:分别表示目标的小类别;
(3)发送信息间隔
发送信息的时间按照拆下规范进行:
- 每一条信息都是在上一条信息发送完之后才能够发送;
- 在没有搜索到信息的时候,车模每100ms发送一次当前信息;
- 在搜索到目标之后立即发送一条搜索到种类的信息,只发送一条;
5、目标位置
为了便于车模进行搜索时路径规划,比赛前场地内的目标位置固定好之后,将会打印在一张A4纸上,表明了场地内目标的数量和位置。参赛选手在按动比赛开始按钮之后便可以将目标位置放在车模镜头前,由车模进行识别之后开始后面的比赛过程。
目标位置示意图如下图所示,它是由黑色矩形框内若干圆形组成。
矩形框的边框宽度大于1.5mm。长宽与实际比赛场地成正比。长宽最小的尺寸超过10厘米,最大不超过20厘米。
圆形的直径在 5 ~ 10mm,它的中心位置与场内目标物所在坐标城正比。

▲ 图2.2.8 目标位置示意图
三、车模技术要求
1、车模平台
车模平台使用四轮麦克纳姆轮车模。可以选用北京科宇公司出品的H车模,广东博思公司的M车模选用。车模详细说明请参见已经公布的《第十七届智能车竞赛竞速比赛细则》。
车模作品完成之后,车模的尺寸没有限制。车模供电电池电压小于24V。
2、微控制器
车模作品中所使用的微控制器需要是NXP公司出品的微控制器,微控制器数量没有限制。
如果微控制器中使用操作系统,则需要使用RT-Thread操作系统。
3、传感器
车模作品中允许使用(不限于)摄像头、IMU、电子罗盘、光电管等。如果使用摄像头,则摄像头的个数小于三个。
车模作品中不允许使用 UWB模块、RTK、激光扫描雷达(单点TOF除外)传感器。
4、软件开发工具
可以使用C语言,Python语言完成车模中微控制器软件开发。
关于车模其它要求请参见《第十七届智能车竞赛竞赛竞速比赛规则》中统一要求。
※ 附 件 ※
■ 竞赛相关文档
■ 规则版本记录
- 2021-11-21: 视觉组比赛细则正式发布。
■ 相关文献链接:
● 相关图表链接:
以上是关于第十七届智能车竞赛智能视觉组比赛细则的主要内容,如果未能解决你的问题,请参考以下文章