OpenCV 自定义线性滤波
Posted 流楚丶格念
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 自定义线性滤波相关的知识,希望对你有一定的参考价值。
卷积概念
1、卷积是图像处理中一个操作,是kernel在图像的每个像素上的操作。
2、kernel本质上一个固定大小的矩阵数组,其中心点称为锚点(anchor point)。

3、把kernel放到像素数组之上,求锚点周围覆盖的像素乘积之和(包括锚点),用来替换锚点覆盖下像素点值称为卷积处理。

常见的算子:
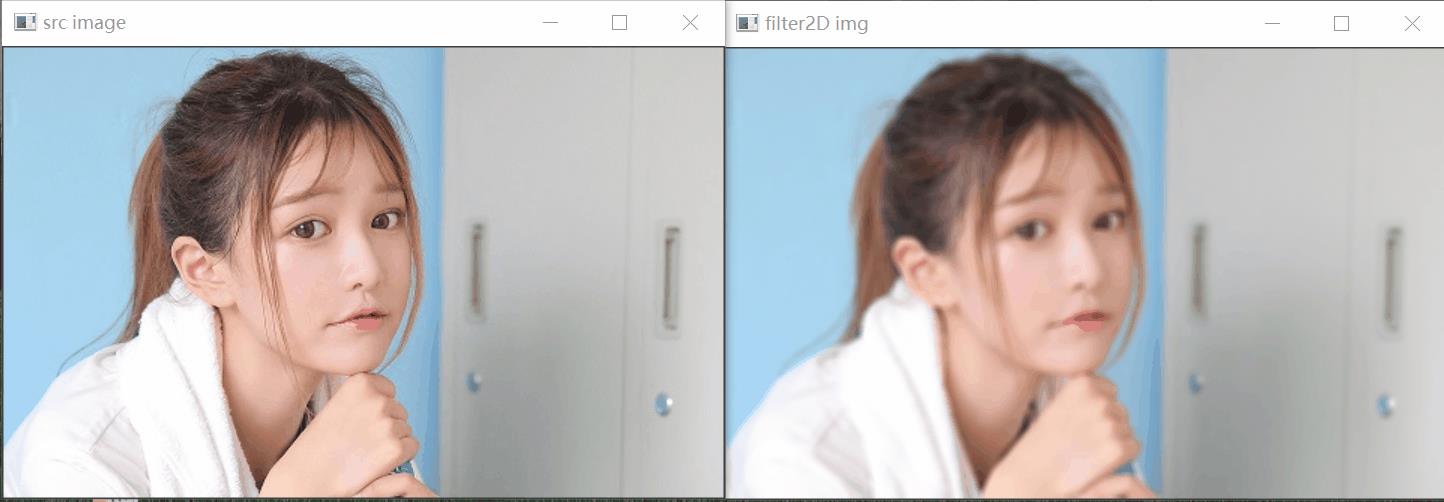
下面效果的原图如下

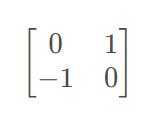
Robert算子:

上图该算子左上角像素点减去右下角像素点,算子和为0,得出图片较暗,突出斜方向图片细节。
上图该算子右上角像素点减去左下角像素点,算子和为0,得出图片较暗,突出斜方向图片细节。
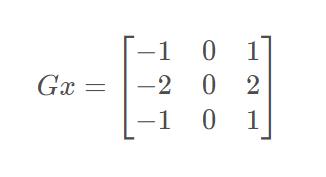
Sobel算子:
得到的效果如下:
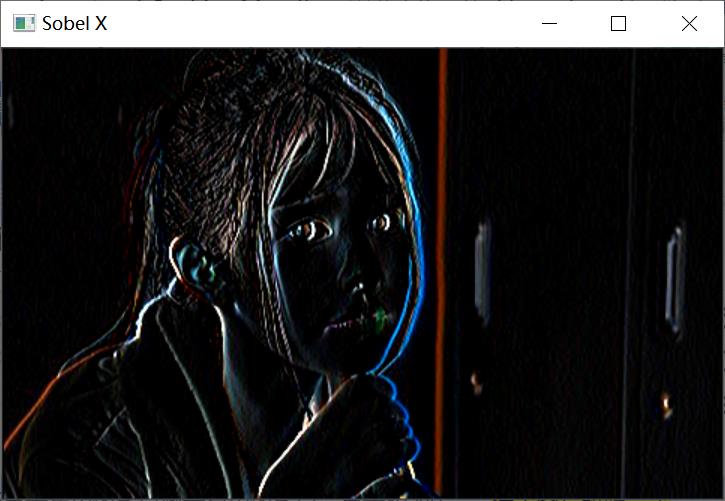
上图该算子左边像素点减去右边像素点,算子和为0,得出图片较暗,突出水平方向图片细节,本行所在算子乘以2倍,边缘信息更强。
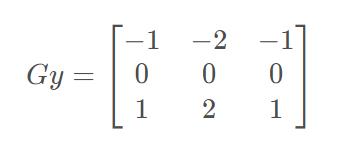
得到的效果如下:

上图该算子下边像素点减去上边像素点,算子和为0,得出图片较暗,突出垂直方向图片细节,本列所在算子乘以2倍,边缘信息更强。
拉普拉斯算子:

得到的效果如下
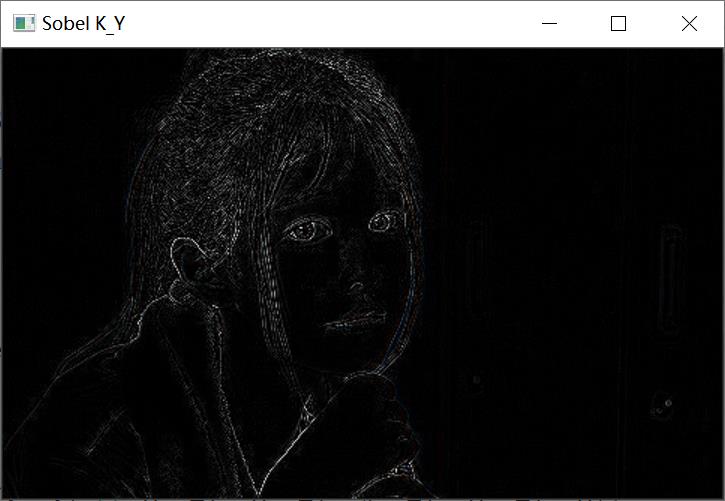
该算子中央像素点的四倍值减去周围像素点,算子和为0,得出图片较暗,突出边缘信息,亮度大的更大,亮度小的更小。
API filter2D函数
函数原型:
filter2D(
Mat src, // 输入图像
Mat dst, // 模糊图像
int depth, // 图像深度32/8
Mat kernel, // 卷积核/模板
Point anchor, // 锚点位置
double delta // 计算出来的像素+delta
)
参数说明:
src: 输入图像dst: 模糊图像depth: 图像深度32/8kernel: 卷积核/模板anchor: 锚点位置delta: 计算出来的像素+delta
代码案例:
#include <iostream>
#include <math.h>
#include <opencv2/opencv.hpp>
#include<opencv2/highgui.hpp>
#include <opencv2/highgui/highgui_c.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
Mat src, dst;
int ksize = 0;
src = imread("./test2.jpg");
if (!src.data)
printf("could not load image...\\n");
return -1;
imshow("src image", src);
// Sobel X 方向
Mat kernel_x = (Mat_<int>(3, 3) << -1, 0, 1, -2,0,2, -1, 0, 1);
filter2D(src, dst, -1, kernel_x, Point(-1, -1), 0.0);
imshow("Sobel X", dst);
// Sobel Y 方向
Mat kernel_y = (Mat_<int>(3, 3) << -1, -2, -1, 0,0,0, 1,2,1);
filter2D(src, dst, -1, kernel_y, Point(-1, -1), 0.0);
imshow("Sobel Y", dst);
// 拉普拉斯算子
Mat kernel_la = (Mat_<int>(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0);
filter2D(src, dst, -1, kernel_la, Point(-1, -1), 0.0);
imshow("Sobel K_Y", dst);
int c = 0;
int index = 0;
while (true)
c = waitKey(500);
if ((char)c == 27)
// 摁下ESC退出程序
break;
ksize = 5 + (index % 8) * 2;
Mat kernel = Mat::ones(Size(ksize, ksize), CV_32F) / (float)(ksize * ksize);
filter2D(src, dst, -1, kernel, Point(-1, -1));
index++;
imshow("filter2D img", dst);
waitKey(0);
return 0;
以上是关于OpenCV 自定义线性滤波的主要内容,如果未能解决你的问题,请参考以下文章