LCD背光调节实验
Posted 行稳方能走远
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了LCD背光调节实验相关的知识,希望对你有一定的参考价值。
不管是使用显示器还是手机,其屏幕背光都是可以调节的,通过调节背光就可以控制屏幕的亮度。在户外阳光强烈的时候可以通过调高背光来看清屏幕,在光线比较暗的地方可以调低背光,防止伤眼睛并且省电。正点原子的三款RGB LCD 也支持背光调节,本章我们就来学习如何调节LCD 背光。
LCD 背光调节简介
正点原子的三个RGB LCD 都有一个背光控制引脚,给这个背光控制引脚输入高电平就会点亮背光,输入低电平就会关闭背光。假如我们不断的打开和关闭背光,当速度足够快的时候就不会感觉到背光关闭这个过程了。这个正好可以使用PWM 来完成,PWM 全称是Pulse Width Modulation,也就是脉冲宽度调制,PWM 信号如图29.1.1 所示:
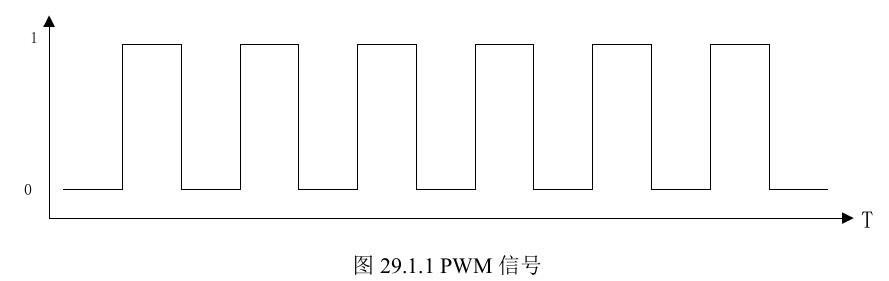
PWM 信号有两个关键的术语:频率和占空比,频率就是开关速度,把一次开关算作一个周期,那么频率就是1 秒内进行了多少次开关。占空比就是一个周期内高电平时间和低电平时间的比例,一个周期内高电平时间越长占空比就越大,反之占空比就越小。占空比用百分之表示,如果一个周期内全是低电平那么占空比就是0%,如果一个周期内全是高电平那么占空比就是
100%。
我们给LCD 的背光引脚输入一个PWM 信号,这样就可以通过调整占空比的方式来调整LCD 背光亮度了。提高占空比就会提高背光亮度,降低占空比就会降低背光亮度。重点就在于PWM 信号的产生和占空比的控制,很幸运的是,I.MX6U 提供了PWM 外设,因此我们可以配置PWM 外设来产生PWM 信号。
打开《I.MX6ULL 参考手册》的第40 章“Chapter 40 Pulse Width Modulation(PWM)”,I.MX6U一共有8 路PWM 信号,每个PWM 包含一个16 位的计数器和一个4 x 16 的数据FIFO,I.MX6U的PWM 外设结构如图29.1.2 所示:
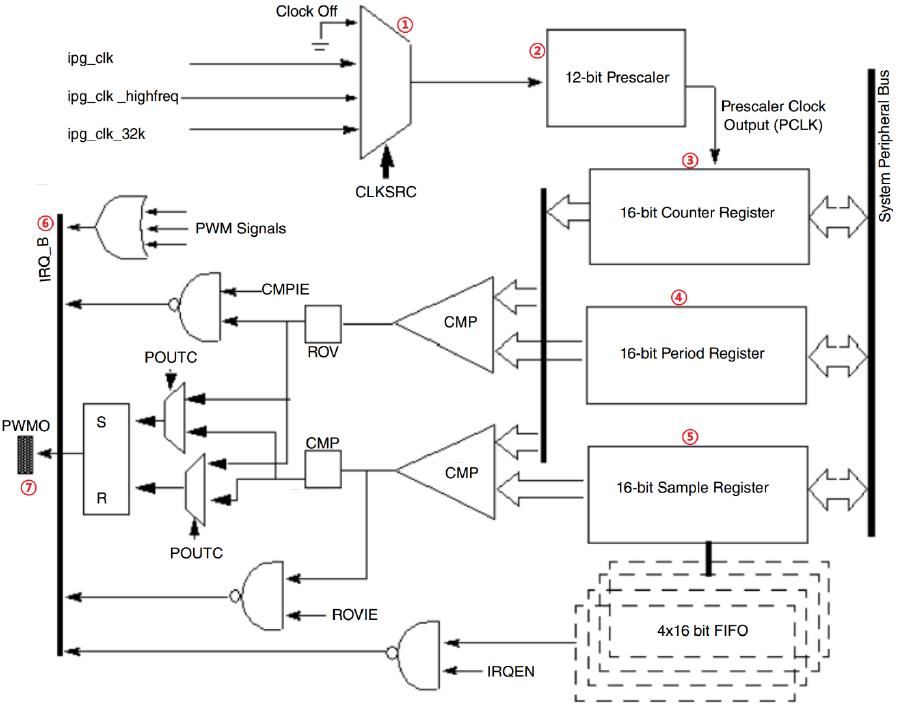
图29.1.2 中的各部分功能如下:
①、此部分是一个选择器,用于选择PWM 信号的时钟源,一共有三种时钟源:ipg_clk、ipg_clk_highfreq 和ipg_clk_32k。
②、这是一个12 位的分频器,可以对①中选择的时钟源进行分频。
③、这是PWM 的16 位计数器寄存器,保存着PWM 的计数值。
④、这是PWM 的16 位周期寄存器,此寄存器用来控制PWM 的频率。
⑤、这是PWM 的16 位采样寄存器,此寄存器用来控制PWM 的占空比。
⑥、此部分是PWM 的中断信号,PWM 是提供中断功能的,如果使能了相应的中断的话就会产生中断。
⑦、此部分是PWM 对应的输出IO,产生的PWM 信号就会从对应的IO 中输出,I.MX6U-ALPHA 开发板的LCD 背光控制引脚连接在I.MX6U 的GPIO1_IO8 上,GPIO1_IO8 可以复用为PWM1_OUT。
可以通过配置相应的寄存器来设置PWM 信号的频率和占空比,PWM 的16 位计数器是个向上计数器,此计数器会从0X0000 开始计数,直到计数值等于寄存器PWMx_PWMPR(x=1~8) + 1,然后计数器就会重新从0X0000 开始计数,如此往复。所以寄存器PWMx_PWMPR 可以设置PWM 的频率。
在一个周期内,PWM 从0X0000 开始计数的时候,PWM 引脚先输出高电平(默认情况下,可以通过配置输出低电平)。采样FIFO 中保存的采样值会在每个时钟和计数器值进行比较,当采样值和计数器相等的话PWM 引脚就会改为输出低电平(默认情况下,同样可以通过配置输出高电平)。计数器会持续计数,直到和周期寄存器PWMx_PWMPR(x=1~8) + 1 的值相等,这样一个周期就完成了。所以,采样FIFO 控制着占空比,而采样FIFO 里面的值来源于采样寄存器PWMx_PWMSAR,因此相当于PWMx_PWMSAR 控制着占空比。至此,PWM 信号的频率和占空比设置我们就知道该如何去做了。
PWM 开启以后会按照默认值运行,并产生PWM 波形,而这个默认的PWM 一般并不是我们需要的波形。如果这个PWM 波形控制着设备的话就会导致设备因为接收到错误的PWM 信号而运行错误,严重情况下可能会损坏设备,甚至人身安全。因此,在开启PWM 之前最好设置好PWMx_PWMPR 和PWMx_PWMSAR 这两个寄存器,也就是设置好PWM 的频率和占空比。
当我们向PWMx_PWMSAR 寄存器写入采样值的时候,如果FIFO 没满的话其值会被存储到FIFO 中。如果FIFO 满的时候写入采样值就会导致寄存器PWMx_PWMSR 的位FWE(bit6)置1,表示FIFO 写错误,FIFO 里面的值也并不会改变。FIFO 可以在任何时候写入,但是只有在PWM 使能的情况下读取。寄存器PWMx_SR 的位FIFOAV(bit2:0)记录着当前FIFO 中有多少个
数据。从采样寄存器PWMx_PWMSAR 读取一次数据,FIFO 里面的数据就会减一,每产生一个周期的PWM 信号,FIFO 里面的数据就会减一,相当于被用掉了。PWM 有个FIFO 空中断,当FIFO 为空的时候就会触发此中断,可以在此中断处理函数中向FIFO 写入数据。
关于I.MX6U 的PWM 的原理知识就讲解到这里,接下来看一下PWM 的几个重要的寄存器,本章我们使用的是PWM1,首先看一下寄存器PWM1_PWMCR 寄存器,此寄存器结构如图29.1.2 所示:
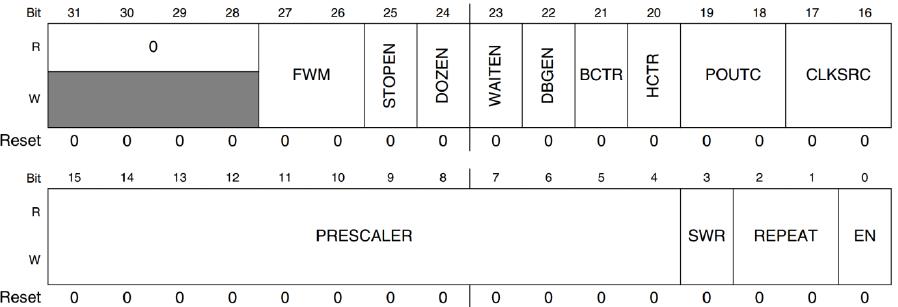
寄存器PWM1_PWMCR 用到的重要位如下:
FWM(bit27:26):FIFO 水位线,用来设置FIFO 空余位置为多少的时候表示FIFO 为空。设置为0 的时候表示FIFO 空余位置大于等于1 的时候FIFO 为空;设置为1 的时候表示FIFO 空余位置大于等于2 的时候FIFO 为空;设置为2 的时候表示FIFO 空余位置大于等于3 的时候FIFO 为空;设置为3 的时候表示FIFO 空余位置大于等于4 的时候FIFO 为空。
STOPEN(bit25):此位用来设置停止模式下PWM 是否工作,为0 的话表示在停止模式下PWM 继续工作,为1 的话表示停止模式下关闭PWM。
DOZEN(bit24):此位用来设置休眠模式下PWM 是否工作,为0 的话表示在休眠模式下PWM 继续工作,为1 的话表示休眠模式下关闭PWM。
WAITEN(bit23):此位用来设置等待模式下PWM 是否工作,为0 的话表示在等待模式下PWM 继续工作,为1 的话表示等待模式下关闭PWM。
DEGEN(bit22):此位用来设置调试模式下PWM 是否工作,为0 的话表示在调试模式下PWM 继续工作,为1 的话表示调试模式下关闭PWM。
BCTR(bit21):字节交换控制位,用来控制16 位的数据进入FIFO 的字节顺序。为0 的时候不进行字节交换,为1 的时候进行字节交换。
HCRT(bit20):半字交换控制位,用来决定从32 位IP 总线接口传输来的哪个半字数据写入采样寄存器的低16 位中。
POUTC(bit19:18):PWM 输出控制控制位,用来设置PWM 输出模式,为0 的时候表示PWM 先输出高电平,当计数器值和采样值相等的话就输出低电平。为1 的时候相反,当为2 或者3 的时候PWM 信号不输出。本章我们设置为0,也就是一开始输出高电平,当计数器值和采样值相等的话就改为低电平,这样采样值越大高电平时间就越长,占空比就越大。
CLKSRC(bit17:16):PWM 时钟源选择,为0 的话关闭;为1 的话选择ipg_clk 为时钟源;为2 的话选择ipg_clk_highfreq 为时钟源;为3 的话选择ipg_clk_32k 为时钟源。本章我们设置为1,也就是选择ipg_clk 为PWM 的时钟源,因此PWM 时钟源频率为66MHz。
PRESCALER(bit15:4):分频值,可设置为04095,对应着14096 分频。
SWR(bit3):软件复位,向此位写1 就复位PWM,此位是自清零的,当复位完成以后此位会自动清零。
REPEAT(bit2:1):重复采样设置,此位用来设置FIFO 中的每个数据能用几次。可设置0~ 3,分别表示FIFO 中的每个数据能用1~4 次。本章我们设置为0,即FIFO 中的每个数据只能用一次。
EN(bit0):PWM 使能位,为1 的时候使能PWM,为0 的时候关闭PWM。
接下来看一下寄存器PWM1_PWMIR 寄存器,这个是PWM 的中断控制寄存器,此寄存器结构如图29.1.3 所示:
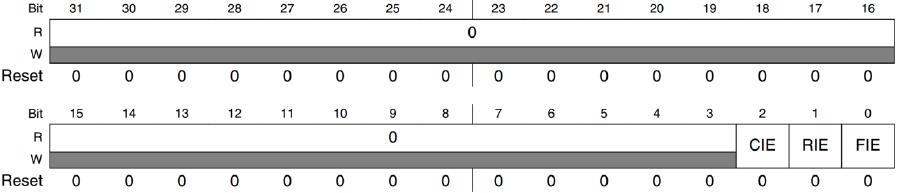
寄存器PWM1_PWMIR 只有三个位,这三个位的含义如下:
CIE(bit2):比较中断使能位,为1 的时候使能比较中断,为0 的时候关闭比较中断。
RIE(bit1):翻转中断使能位,当计数器值等于采样值并回滚到0X0000 的时候就会产生此中断,为1 的时候使能翻转中断,为0 的时候关闭翻转中断。
FIE(bit0):FIFO 空中断,为1 的时候使能,为0 的时候关闭。
再来看一下状态寄存器PWM1_PWMSR,此寄存器结构如图29.1.4 所示:
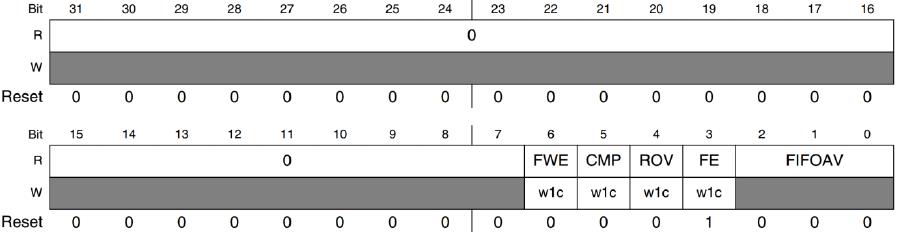
寄存器PWM1_PWMSR 各个位的含义如下:
FWE(bit6):FIFO 写错误事件,为1 的时候表示发生了FIFO 写错误。
CMP(bit5):FIFO 比较事件发标志位,为1 的时候表示发生FIFO 比较事件。
ROV(bit4):翻转事件标志位,为1 的话表示翻转事件发生。
FE(bit3):FIFO 空标志位,为1 的时候表示FIFO 位空。
FIFOAV(bit2:1):此位记录FIFO 中的有效数据个数,有效值为0~4,分别表示FIFO 中有0~ 4 个有效数据。
接下来是寄存器PWM1_PWMPR 寄存器,这个是PWM 周期寄存器,可以通过此寄存器来设置PWM 的频率,此寄存器结构如图29.1.5 所示:

从图29.1.5 可以看出,寄存器PWM1_PWMPR 只有低16 位有效,当PWM 计数器的值等于PERIOD+1 的时候就会从0X0000 重新开始计数,开启另一个周期。PWM 的频率计算公式如下:
PWMO(Hz) = PCLK(Hz) / (PERIOD + 2)
其中PCLK 是最终进入PWM 的时钟频率,假如PCLK 的频率为1MHz,现在我们要产生一个频率为1KHz 的PWM 信号,那么就可以设置PERIOD = 1000000 / 1000 – 2 = 998。
最后来看一下寄存器PWM1_PWMSAR,这是采样寄存器,用于设置占空比的,此寄存器结构如图29.1.6 所示:

此寄存器也是只有低16 位有效,为采样值。通过这个采样值即可调整占空比,当计数器的值小于SAMPLE 的时候输出高电平(或低电平)。当计数器值大于等于SAMPLE,小于寄存器PWM1_PWMPR 的PERIO 的时候输出低电平(或高电平)。同样在上面的例子中,假如我们要设置PWM 信号的占空比为50%,那么就可以将SAMPLE 设置为(PERIOD + 2) / 2 = 1000 / 2=500。
关于PWM 有关的寄存器就介绍到这里,关于这些寄存器详细的描述,请参考《I.MX6ULL参考手册》第2480 页的40.7 小节。本章我们使用I.MX6U 的PWM1,PWM1 的输出引脚为GPIO1_IO8,配置步骤如下:
1、配置引脚GPIO1_IO8
配置GPIO1_IO08 的复用功能,将其复用为PWM1_OUT 信号线。
2、初始化PWM1
初始化PWM1,配置所需的PWM 信号的频率和默认占空比。
3、设置中断
因为FIFO 中的采样值每个周期都会少一个,所以需要不断的向FIFO 中写入采样值,防止其为空。我们可以使能FIFO 空中断,这样当FIFO 为空的时候就会触发相应的中断,然后在中断处理函数中向FIFO 写入采样值。
4、使能PWM1
配置好PWM1 以后就可以开启了。
硬件原理分析
本试验用到的资源如下:
①、指示灯LED0。
②、RGB LCD 接口。
③、按键KEY0
本实验用到的硬件原理图参考第二十四章,本章实验我们一开始设置RGB LCD 的背光亮度PWM 信号频率为1KHz,占空比为10%,这样屏幕亮度就很低。然后通过按键KEY0 逐步的提升PWM 信号的占空比,按照10%步进。当达到100%以后再次按下KEY0,PWM 信号占空比回到10%重新开始。LED0 不断的闪烁,提示系统正在运行。
实验程序编写
本实验对应的例程路径为:开发板光盘-> 1、裸机例程-> 20_pwm_lcdbacklight。
本章实验在上一章例程的基础上完成,更改工程名字为“backlight”,然后在bsp 文件夹下创建名为“backlight”的文件夹,然后在bsp/backlight 中新建bsp_backlight.c 和bsp_backlight.h这两个文件。在bsp_backlight.h 中输入如下内容:
1 #ifndef _BACKLIGHT_H
2 #define _BACKLIGHT_H
3 /***************************************************************
4 Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
5 文件名: bsp_backlight.c
6 作者: 左忠凯
7 版本: V1.0
8 描述: LCD背光PWM驱动头文件。
9 其他: 无
10 论坛: www.openedv.com
11 日志: 初版V1.0 2019/1/22 左忠凯创建
12 ***************************************************************/
13 #include "imx6ul.h"
14
15 /* 背光PWM结构体*/
16 struct backlight_dev_struc
17
18 unsigned char pwm_duty; /* 占空比*/
19 ;
20
21 /* 函数声明*/
22 void backlight_init(void);
23 void pwm1_enable(void);
24 void pwm1_setsample_value(unsigned int value);
25 void pwm1_setperiod_value(unsigned int value);
26 void pwm1_setduty(unsigned char duty);
27 void pwm1_irqhandler(void);
28
29 #endif
文件bsp_backlight.h 文件内容很简单,在第16 行定义了一个背光PWM 结构体,剩下的就是函数声明。在文件bsp_backlight.c 中输入如下内容:
1 #include "bsp_backlight.h"
2 #include "bsp_int.h"
3 #include "stdio.h"
4
5 struct backlight_dev_struc backlight_dev; /* 背光设备*/
6
7 /*
8 * @description : pwm1中断处理函数
9 * @param : 无
10 * @return : 无
11 */
12 void pwm1_irqhandler(void)
13
14 if(PWM1->PWMSR & (1 << 3)) /* FIFO为空中断*/
15
16 /* 将占空比信息写入到FIFO中,其实就是设置占空比*/
17 pwm1_setduty(backlight_dev.pwm_duty);
18 PWM1->PWMSR |= (1 << 3); /* 写1清除中断标志位*/
19
20
21
22 /*
23 * @description : 初始化背光PWM
24 * @param : 无
25 * @return : 无
26 */
27 void backlight_init(void)
文件bsp_blacklight.c 一共有6 个函数,首先是函数pwm1_irqhandler,这个是PWM1 的中断处理函数。需要在此函数中处理FIFO 空中断,当FIFO 空中断发生以后需要向采样寄存器PWM1_PWMSAR 写入采样数据,也就是占空比值,最后要清除相应的中断标志位。第2 个函数是backlight_init,这个是背光初始化函数,在此函数里面会初始化背光引脚GPIO1_IO08,将其复用为PWM1_OUT。然后此函数初始化PWM1,设置要产生的PWM 信号频率和默认占空比,接下来使能FIFO 空中断,注册相应的中断处理函数,最后使能PWM1。第3 个函数是pwm1_enable,用于使能PWM1。第4 个函数是pwm1_setsample_value,用于设置采样值,也就是寄存器PWM1_PWMSAR 的值。第5 个函数是pwm1_setperiod_value,用于设置PWM 信号的频率。第6 个函数是pwm1_setduty,用于设置PWM 的占空比,这个函数只有一个参数duty,也就是占空比值,单位为%,函数内部会根据百分值计算出寄存器PWM1_PWMSAR 应该设置的值。
最后在main.c 文件中输入如下所示内容:
/**************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名: main.c
作者: 左忠凯
版本: V1.0
描述: I.MX6U开发板裸机实验21 背光PWM实验
其他: 我们使用手机的时候背光都是可以调节的,同样的I.MX6U-ALPHA
开发板的LCD背光也是可以调节,LCD背光就相当于一个LED灯。
LED灯的亮灭可以通过PWM来控制,本实验我们就来学习一下如何
通过PWM来控制LCD的背光。
论坛: www.openedv.com
日志: 初版V1.0 2019/1/21 左忠凯创建
**************************************************************/
第34 行调用函数backlight_init 初始化屏幕背光PWM。第44 行设置背光PWM 默认占空比为10%。在main 函数中读取按键值,如果KEY0 按下的话就将PWM 信号的占空比增加10%,当占空比超过100%的时候就重回到10%,重新开始。总的来说,main.c 的内容还是很简单的。
编译下载验证
编写Makefile 和链接脚本
修改Makefile 中的TARGET 为backlight,然后在在INCDIRS 和SRCDIRS 中加入“bsp/rtc”,修改后的Makefile 如下:
1 CROSS_COMPILE ?= arm-linux-gnueabihf-
2 TARGET ?= backlight
3
4 /* 省略掉其它代码...... */
5
6 INCDIRS := imx6ul \\
第2 行修改变量TARGET 为“backlight”,也就是目标名称为“backlight”。
第26 行在变量INCDIRS 中添加背光PWM 驱动头文件(.h)路径。
第48 行在变量SRCDIRS 中添加背光PWM 驱动驱动文件(.c)路径。
链接脚本保持不变。
编译下载
使用Make 命令编译代码,编译成功以后使用软件imxdownload 将编译完成的backlight.bin文件下载到SD 卡中,命令如下:
chmod 777 imxdownload //给予imxdownload 可执行权限,一次即可
./imxdownload backlight.bin /dev/sdd //烧写到SD 卡中,不能烧写到/dev/sda 或sda1 里面!
烧写成功以后将SD 卡插到开发板的SD 卡槽中,然后复位开发板,默认背光PWM 是10%,PWM 信号波形如图29.4.2.1 所示:

从图29.4.2.1 可以看出,此时背光PWM 信号的频率为1.00KHz,占空比是10.02%,和我们代码中配置的一致,此时LCD 的屏幕显示如图29.4.2.2 所示:
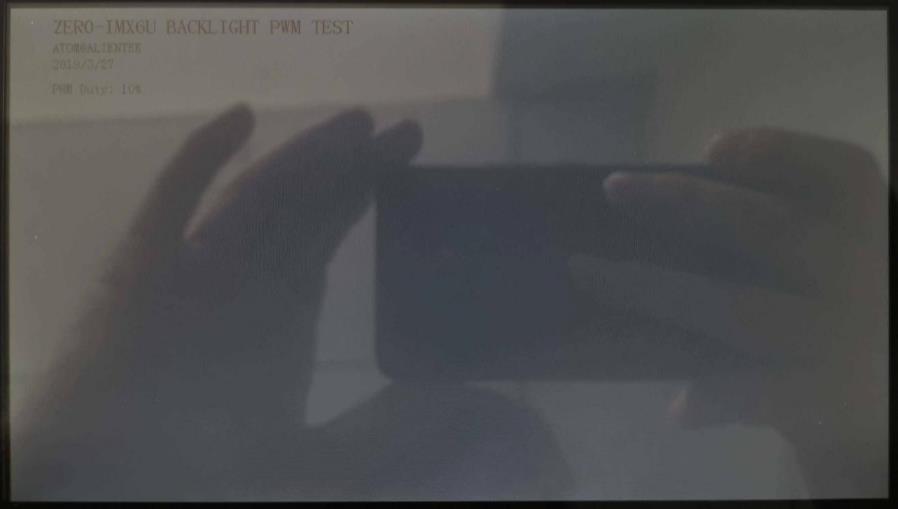
图29.4.2.2 就是PWM 占空比为10%的LCD 屏幕显示,可以看出屏幕亮度很低,甚至可以看到屏幕上拍照人的倒影。因为拍照的原因,实际亮度跟实际情况可能会有少许差别。
我们将PWM 的占空比调节到90%,此时的LCD 屏幕亮度肯定会很亮,如图29.4.2.3 所示:
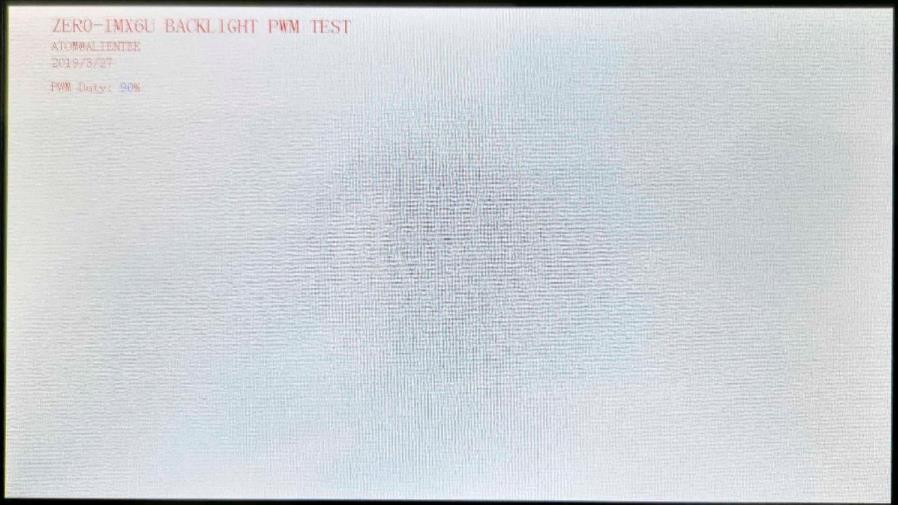
图29.4.2.3 的屏幕亮度相比图29.4.2.2 就要高很多,这个就是LCD 背光调节的原理,采用PWM 波形来完成,通过调整占空比即可完成亮度调节。
至此,I.MX6U-ALPHA 开发板的所有裸机例程已经全部完成了,通过这几十个裸机例程,我们对I.MX6UL/ULL 这款芯片的外设有了一个基本的了解,为我们以后学习Uboot 和Linux 驱动打下了坚实的基础。
以上是关于LCD背光调节实验的主要内容,如果未能解决你的问题,请参考以下文章